一种喷洒式植保无人机及其喷洒控制方法
文献发布时间:2023-06-19 11:45:49
技术领域
本发明涉及无人机技术领域,特别涉及一种喷洒式植保无人机及其喷洒控制方法。
背景技术
植保无人机是用于农林植物保护作业的无人驾驶飞机,该型无人飞机由飞行平台(固定翼、直升机、多轴飞行器)、导航飞控、喷洒机构三部分组成,通过地面遥控或导航飞控,来实现喷洒作业,可以喷洒药剂、种子、粉剂等。
使用无人机向农作物进行低空喷洒,具有操作简单、用药量少、安全性高等优点,因而植保无人机已经越来越多的应用到现代农业作业中,目前市场上用于植保喷洒的无人机存在如下问题:在不同农作物中交叉作业,需要繁复的工序更换喷头,效率低、安全性差。
发明内容
本发明提供了一种喷洒式植保无人机,通过设计具有至少两种喷淋头的喷淋器,再通过驱动机构使喷淋器旋转,以实现喷淋头的转换,无需手动更换喷淋头,能够根据作物类型选择喷淋头,效率高、操作方便、实用性强。
本发明的技术方案为:
一种喷洒式植保无人机,包括:
无人机本体;
储液箱,其与无人机主体可拆卸连接,用于盛储植保液;
喷淋管,其可选转的支撑在无人机本体的底部,且与储液箱连通;
喷淋器,其可旋转设置在喷淋管内,与喷淋管连通,且具有至少两种喷淋头;
驱动机构,其连接喷淋器,能够驱动喷淋器旋转,以转换喷淋头。
优选的是,喷淋管包括:
旋转盘;
喷淋主管,其一端连接旋转盘,能够随旋转盘转动;
喷淋支管,其一端与喷淋主管另一端连通,且具有喷淋窗;
挡板,其设置在喷淋窗的两侧,用于回流所述植保液喷淋过程漂移的液体。
优选的是,喷淋器包括:
喷淋主体,其表面具有第一弧面、第二弧面、第三弧面和第四弧面;
第一喷淋头,其为阵列分布在第一弧面上的第一喷淋孔,第一喷淋孔的孔径为10-15mm,孔距为15-30mm;
第二喷淋头,其为阵列分布在第二弧面上的第二喷淋孔,第二喷淋孔孔径为6-10mm,孔距为8-20mm;
第三喷淋头,其为阵列分布在第三弧面上的第三喷淋孔,第三喷淋孔的孔径为4-6mm,孔距为5-10mm。
优选的是,还包括:
定位凹槽,其设置在第一弧面、第二弧面、第三弧面、第四弧面的交接处;
弹性定位销,其设置在喷淋支管的内壁,能够与定位凹槽配合。
优选的是,驱动机构包括:
齿轮,其连接喷淋主体,能够带动喷淋主体旋转;
齿条,其可滑动支撑在旋转盘上,且与齿轮啮合,齿条滑动能够驱动齿轮旋转;
丝杠,其可旋转穿设于齿条的一端,且与齿条螺纹配合,丝杠旋转,齿条沿丝杠滑动;
电机,其连接丝杠,能够驱动丝杠旋转。
优选的是,无人机本体包括:
机体;
至少4个机臂,其一端连接机体,且为中空结构,内部设置有滑轨;
起落架,其一端与机臂另一端铰接;
驱动杆,其一端与起落架另一端铰接,另一端与滑轨铰接,且能沿滑轨滑动。
优选的是,储液箱包括:
箱体,其上具有补液口和出液口,补液口和出液口处均设置有过滤网;
抽液泵,其用于抽取所述植保液;
喷淋柱,其可旋转支撑在箱体内,且与抽液泵连通,表面具有阵列分布的第四喷淋孔。
优选的是,第一喷淋孔、第二喷淋孔、第三喷淋孔和第四喷淋孔均为锥形孔。
一种喷洒式植保无人机的喷洒控制方法,包括:
在喷淋头关闭状态下,电机正向转动,喷淋器以转速v正向转动nt时间后停止,即打开第n喷淋头;
在第n喷淋头打开状态下,电机反向转动,喷淋器以转速v反向转动电机nt时间后停止,即关闭喷淋头。
优选的是,转速的计算公式为:
其中,v为喷淋器转速,
所述转动时间t的计算公式为:
其中,L为喷淋器的外径。
本发明的有益效果是:
1.本发明提供了一种喷洒式植保无人机,通过设计具有至少两种喷淋头的喷淋器,再通过驱动机构使喷淋器旋转,以实现喷淋头的转换,无需手动更换喷淋头,效率高。
2.本发明提供的喷洒式植保无人机,在不进行喷洒作业时,可以将喷洒头关闭,可以保护喷洒头不被污染或堵塞。
3.本发明提供的喷洒式植保无人机在喷淋只管上设置了挡板,可以使喷淋过程中漂移的植保液回流,一方面可以减少植保液损失,另一方面可以避免植保液对机身的污染。
4.本发明提供的喷洒式植保无人机,在机臂上设置了可折叠的起落架,在喷洒作业时将起落架折叠可以避免起落架受植保液污染,无人机落地时,打开起落架,避免喷淋管与地面接触损坏。
5.本发明还提供了一种喷洒式植保无人机的喷洒控制方法,给出了喷淋器转动速度和时间,使喷淋器匀速转动,延长使用寿命。
附图说明
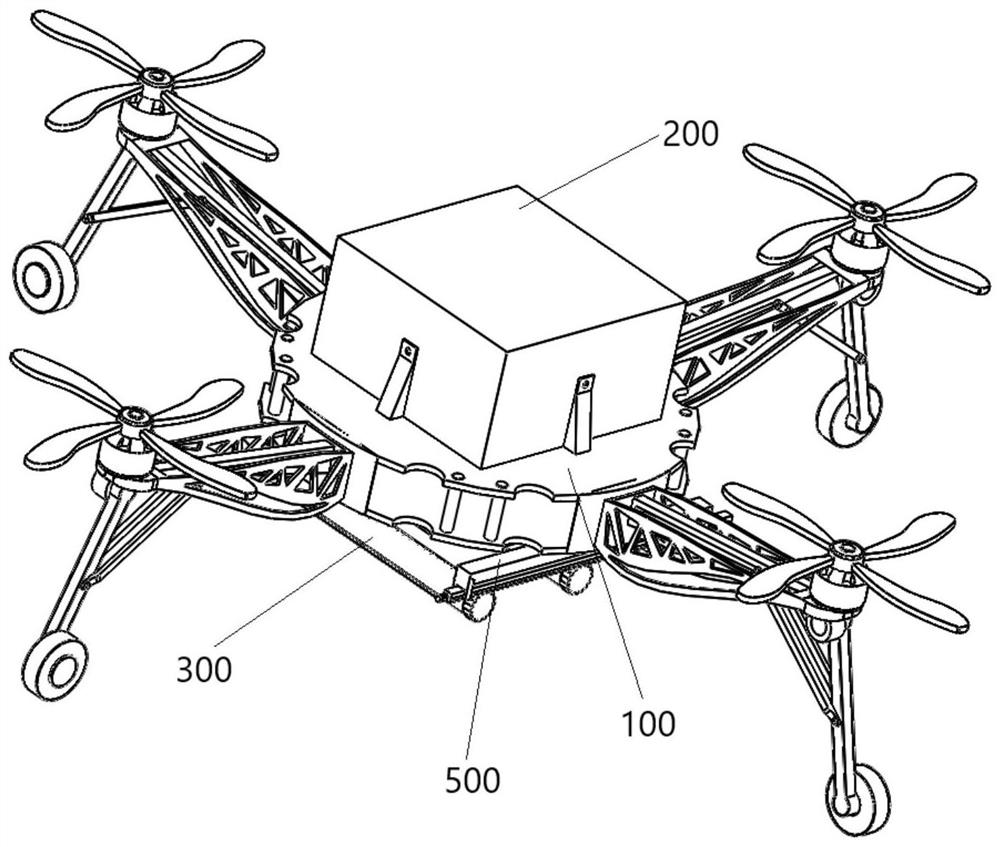
图1为本发明提供的一种喷洒式植保无人机的结构示意图。
图2为本发明提供的一种喷洒式植保无人机的底部示意图
图3为本发明的一个实施例中喷淋管的结构示意图。
图4为喷淋支管与喷淋器的连接示意图。
图5为本发明的一个实施例中喷淋器的截面图。
图6为本发明的一个实施例中驱动机构的结构示意图。
图7为本发明的一个实施例中无人机本体的结构示意图。
图8为本发明的一个实施例中机臂的结构示意图。
图9为本发明的一个实施例中储液箱的结构示意图。
图10为本发明的一个实施例中储液箱的俯视图。
具体实施方式
以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
需要说明的是,在本发明的描述中,术语“中”、“上”、“下”、“横”、“内”等指示的方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是为了便于描述,而不是指示或暗示装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。此外,还需要说明的是,在本发明的描述中,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域技术人员而言,可根据具体情况理解上述术语在本发明中的具体含义。
如图1-2所示为本发明提供的一种喷洒式植保无人机,包括,无人机本体100、储液箱200、喷淋管300、喷淋器400和驱动机构500。
储液箱200与无人机主体100可拆卸连接,用于盛储植保液,喷淋管300可旋转支撑在无人机主体100的底部,且与储液箱200连通,喷淋器400可旋转设置在喷淋管300内,与喷淋管300连通,且具有至少两种喷淋头,驱动机构500连接喷淋器400,能够驱动喷淋器400旋转,以转换喷淋头。
如图3所示,喷淋管300包括旋转盘310、喷淋主管320和喷淋支管330。
喷淋主管320一端连接旋转盘310,能够随旋转盘310转动,喷淋支管330的一端与喷淋主管310的另一端连通,且具有喷淋窗331,喷淋窗331两侧设置有挡板332,可以使喷淋过程中漂移的植保液回流,一方面可以减少植保液损失,另一方面可以避免植保液对机身的污染。
如图4-5所示,喷淋器包括喷淋主体410、第一喷淋头420、第二喷淋头430和第三喷淋头440。
其中,喷淋主体410一端与喷淋支管320连通,且表面具有第一弧面411、第二弧面412、第三弧面413、第四弧面414和弹性定位销415。
定位凹槽415能够与弹性定位销配合,使喷淋主体定位。
第一喷淋头420为阵列分布在第一弧面411上的第一喷淋孔421,第一喷淋孔421的孔径为10-15mm,孔距为15-30mm;第二喷淋头430为阵列分布在第二弧面412上的第二喷淋孔431,第二喷淋孔431的孔径为6-10mm,孔距为8-20mm;第三喷淋头440为阵列分布在第三弧面413上的第三喷淋孔441,第三喷淋孔441的孔径为4-6mm,孔距为5-10mm。
作为一种优选,第一喷淋孔421、第二喷淋孔431和第三喷淋孔441均为锥形孔。
如图6所示,驱动机构包括齿轮510、齿条520、丝杠530和电机540。
其中,齿轮510连接喷淋主体410,能够带动喷淋主体410旋转,齿条520可滑动支撑在旋转盘310上,且与齿轮510啮合,齿条520滑动能够驱动齿轮510旋转,丝杠530其可旋转穿设于齿条520的一端,并与齿条520螺纹配合,丝杠530旋转,齿条520沿丝杠530滑动,电机540连接丝杠530,能够驱动丝杠530旋转。
如图7-8所示,无人机主体包括机体110、机臂111、起落架120和拉杆130。
其中,机械臂111至少为4个,机臂111一端与机体连接,且为中空结构,内部设置有滑轨111a,起落架120一端与机臂111另一端铰接,驱动杆130一端与起落架120另一端铰接,驱动杆130另一端与滑轨111a铰接,且能沿滑轨111a滑动。
在无人机执行喷洒作业时,驱动杆130沿滑轨111a向靠近机体110一侧滑动,拉动起落架120折叠,收进机臂111的中空部,避免在喷洒过程中受植保液污染;无人机降落时,驱动杆130沿滑轨111a向远离机体110一侧滑动,推动起落架120打开,无人机着陆时,起落架120与地面接触,喷淋管300腾空,避免受到撞击损坏。
作为一种优选,起落架底部具有缓冲机构,可有效减少无人机降落时受到的反向冲击力。
如图9-10所示,储液箱包括箱体210、喷淋柱220和抽液泵230。
箱体210上具有补液口211和出液口212,补液口211和出液口212处均设置有过滤网,抽液泵230用于抽取植保液,喷淋柱220为椎体,可旋转支撑在箱210内,喷淋柱220与抽液泵230连通,且表面具有阵列分布的第四喷淋孔221,喷淋柱由转动电机222驱动旋转,通过抽液泵230抽取植保液,再由喷淋柱220旋转喷淋,使得储液箱200内的液体往复循环,始终保持均匀。
实施以喷洒式植保的工作过程为例,作进一步说明
向储物箱中装入适量的植保液,启动抽液泵230和喷淋柱转动电机222,使植保液在箱体210内部循环均质。
启动电机540正向转动,丝杠530随电机540转动,使齿条520沿丝杠530滑动,与齿条520啮合的齿轮510转动,以驱动喷淋主体410旋转,以根据作物的特性选择合适的喷淋头,启动无人机,联动杆130一端沿滑轨111a向靠近机体一侧滑动,起落架120折叠,收集机臂111的中空部,根据既定路线完成喷洒作业。
喷洒作业完成后,启动电机540反向转动,驱动喷淋主体410转动,使得喷淋主体410的第四弧面414与喷淋窗配合,将喷淋头关闭,联动杆130沿滑轨111a向远离机体一侧滑动,起落架120打开,无人机着陆。
本发明提供了一种喷洒式植保无人机,通过设计具有至少两种喷淋头的喷淋器,再通过驱动机构使喷淋器旋转,以实现喷淋头的转换,无需手动更换喷淋头,能够根据作物类型选择喷淋头,效率高、操作方便、实用性强。
一种喷洒式植保无人机的喷洒控制方法,基于上述的喷洒式植保无人机,包括:
在喷淋头关闭状态下,电机正向转动,喷淋器以转速v正向转动nt时间后停止,即打开第n喷淋头;
在第n喷淋头打开状态下,电机饭向转动,喷淋器以转速v反向转动电机nt时间后停止,即关闭喷淋头。
转速的计算公式为:
其中,v为喷淋器转速,
转动时间t的计算公式为:
其中,L为喷淋器的外径。
本发明给出了喷淋器转动速度和时间,使喷淋器匀速转动,延长使用寿命。
以上内容仅是本发明的实施例,方案中公知的具体结构及特性等常识在此未作过多描述,本领域技术人员容易理解的是,本发明的保护范围显然不局限于这些具体实施方式。在不脱离本发明的前提下,还可以作出若干变形和改进,这些也应该视为本发明的保护范围,这些都不会影响本发明实施的效果和专利的实用性。
- 一种喷洒式植保无人机及其喷洒控制方法
- 一种植保无人机喷洒控制系统及其喷洒控制方法