激光水深测量系统及方法
文献发布时间:2023-06-19 13:49:36
技术领域
本发明属于激光探测技术领域,涉及激光测深技术,具体地说,涉及一种激光水深测量系统及方法。
背景技术
岛礁地形测绘具有重要意义,但现有大型测量船的声学测量设备无法进入浅海,而小型无人机艇由于随波浪倾斜严重,无法实现顺利测量。目前新发展起来的机载激光测深系统可以实现浅海与岛礁的地形测绘,普遍采用的激光测距方法为脉冲激光测距方法和三角测距方法进行激光测深。
脉冲测距方法,激光峰值功率高,满足国际海道测量规范IHO-44的要求,可达到在海水衰减系数优于0.2m
三角测距方法,采用成像方法测深。例如:公开号为CN1307228A的中国专利公开的一种高精度便携式海基激光测深方法及装置,其采用三角法进行激光测深。但三角法激光测深时,测深深度非常有限,无法满足实际需求。
发明内容
本发明针对现有技术存在的测深方法存在的设备结构复杂、成本高等上述问题,提供了一种激光水深测量系统及方法,采用相位测距,测距深度满足大部分浅水深度要求,且设计简单,成本低,实现小型化旋翼无人机搭载,测深精度高,可实现随时随地单人测量。
为了达到上述目的,本发明提供了一种激光水深测量系统,安装于小型无人机底部,包括:
蓝/绿相位激光测距装置,用于测量蓝/绿激光出射口至水底的单程光程L;
红外/近红外相位激光测距装置,与蓝/绿相位激光测距装置并列放置,用于测量红外/近红外激光出射口至水面的单程光程L
姿态传感器,用于测量激光水深测量系统的姿态角θ
GPS模块,用于测量激光水深测量系统的定位信息;
主控单元,分别与蓝/绿相位激光测距装置、红外/近红外相位激光测距装置、姿态传感器、GPS模块连接,用于根据光程L、光程L
优选的,根据光程L、光程L
根据蓝/绿激光在水中部分的单程光程L
H=L
又:
L
θ
则有:
H=(L-L
式中,n为水的折射率。
优选的,根据光程L、光程L
通过公式(5)和公式(6)计算待测水深位置对应的经纬度,公式(5)和公式(6)表示为:
x=X+L
y=Y+L
式中,x为待测水深位置的纬度,y为待测水深位置的经度;X为由GPS模块测得的纬度,Y为由GPS模块测得的经度;θ
优选的,所述主控单元包括:
主控制板;
控制模块,设于主控制板上,分别与蓝/绿相位激光测距装置、红外/近红外相位激光测距装置连接;
计算模块,设于主控制板上,分别与蓝/绿相位激光测距装置、红外/近红外相位激光测距装置、姿态传感器、GPS模块连接,用于根据光程L、光程L
进一步的,还包括存储器,所述存储器与计算模块连接,用于存储计算模块计算得到的待测水深H、待测水深位置对应的经纬度及时间。
进一步的,还包括壳体,所述蓝/绿相位激光测距装置、红外/近红外相位激光测距装置、姿态传感器、GPS模块、存储器均放置于壳体内。
为了达到上述目的,本发明还提供了一种激光水深测量方法,基于上述激光水深测量系统,其具体步骤为:
蓝/绿相位激光测距装置测量蓝/绿激光出射口至水底的单程光程L;
红外/近红外相位激光测距装置测量红外/近红外激光出射口至水面的单程光程L
姿态传感器测量激光水深测量系统的姿态角θ
GPS模块测量激光水深测量系统的定位信息;
主控单元接收光程L、光程L
H=(L-L
x=X+L
y=Y+L
式中,n为水的折射率,x为待测水深位置的纬度,y为待测水深位置的经度;X为由GPS模块测得的纬度,Y为由GPS模块测得的经度;θ
与现有技术相比,本发明的优点和积极效果在于:
(1)本发明激光水深测量系统及方法采用相位测距,通过测得的蓝/绿激光光程、红外/近红外激光光程、无人机飞行姿态角信息计算得到待测位置的水深值。进而结合GPS定位信息,通过对某个区域的水深进行分布式定位测量,可绘制水下地形图。
(2)本发明激光水深测量系统结构简单合理、成本低,尺寸重量小,可实现小型化多旋翼无人机搭载,其测深精度更高,可实现随时随地单人测量,能够满足大部分浅水测深需求。
附图说明
图1为本发明实施例所述激光水深测量系统的安装示意图;
图2为本发明实施例所述激光水深测量系统的结构框图;
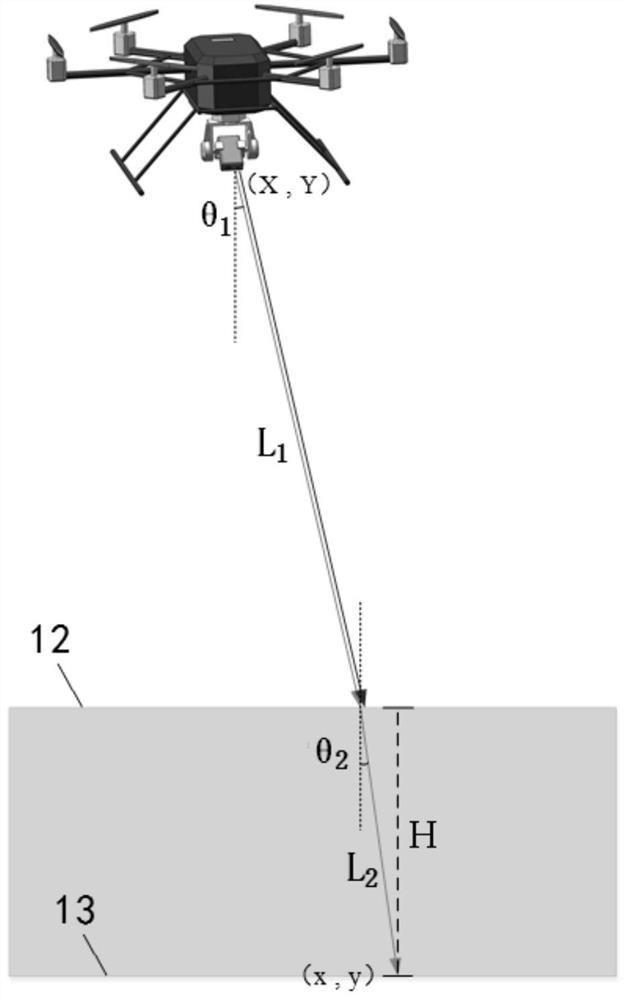
图3为本发明实施例计算待测水深H及待测水深位置经纬度的示意图;
图4为本发明实施例所述主控单元的结构框图;
图5为本发明实施例所述激光水深测量方法的流程图。
图中,1、蓝/绿相位激光测距装置,2、红外/近红外相位激光测距装置,3、姿态传感器,4、GPS模块,5、主控单元,501、主控制板,502、控制器,503、计算模块,6、存储器,7、壳体,10、小型无人机,11、激光水深测量系统,12、水面,13、水底。
具体实施方式
下面,通过示例性的实施方式对本发明进行具体描述。然而应当理解,在没有进一步叙述的情况下,一个实施方式中的元件、结构和特征也可以有益地结合到其他实施方式中。
在本发明的描述中,需要说明的是,术语“上”、“下”、“左”、“右”、“内”、“外”等指示的方位或位置关系为基于附图所示的位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性。
实施例1:参见图1、图2,本实施例提供了一种激光水深测量系统,安装于小型无人机底部,包括:
蓝/绿相位激光测距装置1,用于测量蓝/绿激光出射口至水底的单程光程L;
红外/近红外相位激光测距装置2,与蓝/绿相位激光测距装置1并列放置,用于测量红外/近红外激光出射口至水面的单程光程L
姿态传感器3,用于测量激光水深测量系统的姿态角θ
GPS模块4,用于测量激光水深测量系统的定位信息;
主控单元5,分别与蓝/绿相位激光测距装置1、红外/近红外相位激光测距装置2、姿态传感器3、GPS模块4连接,用于根据光程L、光程L
具体地,参见图3,根据光程L、光程L
根据蓝/绿激光在水中部分的单程光程L
H=L
又:
L
θ
则有:
H=(L-L
式中,n为水的折射率。
具体地,根据光程L、光程L
通过公式(5)和公式(6)计算待测水深位置对应的经纬度,公式(5)和公式(6)表示为:
x=X+L
y=Y+L
式中,x为待测水深位置的纬度,y为待测水深位置的经度;X为由GPS模块测得的纬度,Y为由GPS模块测得的经度;θ
具体地,参见图4,所述主控单元包括:
主控制板501;
控制模块502,设于主控制板501上,分别与蓝/绿相位激光测距装置1、红外/近红外相位激光测距装置2连接;
计算模块503,设于主控制板501上,分别与蓝/绿相位激光测距装置1、红外/近红外相位激光测距装置2、姿态传感器3、GPS模块4连接,用于根据光程L、光程L
继续参见图2、图4,上述激光水深测量系统还包括存储器6,所述存储器6与计算模块503连接,用于存储计算模块503计算得到的待测水深H、待测水深位置对应的经纬度及时间。
继续参见图2,上述激光水深测量系统还包括壳体7,所述蓝/绿相位激光测距装置1、红外/近红外相位激光测距装置2、姿态传感器3、GPS模块4、主控单元5、存储器6均放置于壳体7内。
本实施例中,所述蓝/绿相位激光测距装置采用蓝/绿相位激光测距仪,所述红外/近红外相位激光测距装置采用红外/近红外相位激光测距仪。由于相位激光测距仪的光源采用半导体激光器,调制该激光器出光直接通过驱动电路板进行驱动调制即可产生满足要求的激光输出,驱动电路简单,功耗降低,体积重量大大降低,成本大幅下降。
本实施例所述激光水深测量系统,结构简单、成本低,尺寸重量小,可实现小型化多旋翼无人机搭载,其测深精度更高,可实现随时随地单人测量,能够满足大部分浅水测深需求。
实施例2:参见图5,本实施例提供了一种激光水深测量方法,基于实施例1所述激光水深测量系统,其具体步骤为:
S1、蓝/绿相位激光测距装置测量蓝/绿激光出射口至水底的单程光程L;
S2、红外/近红外相位激光测距装置测量红外/近红外激光出射口至水面的单程光程L
S3、姿态传感器测量激光水深测量系统的姿态角θ
S4、GPS模块测量激光水深测量系统的定位信息;
S5、主控单元接收光程L、光程L
H=(L-L
x=X+L
y=Y+L
式中,n为水的折射率,x为待测水深位置的纬度,y为待测水深位置的经度;X为由GPS模块测得的纬度,Y为由GPS模块测得的经度;θ
其中,计算待测水深H的公式(4)由下述步骤获得:
根据蓝/绿激光在水中部分的单程光程L
H=L
又:
L
θ
则有:
H=(L-L
上述测量方法中,步骤S1至S4的顺序可以相互互换,也可以同时进行。
需要说明的是,在进行测试开始之前,首先通过主控单元发送开始测试指令至蓝/绿相位激光测距装置和红外/近红外相位激光测距装置,然后蓝/绿相位激光测距装置和红外/近红外相位激光测距装置接收到测试指令后开始测量光程并将光程数据传送至主控单元。同时姿态传感器和GPS模块将实时测量的姿态角和定位信息发送至主控单元。主控单元计算得到待测水深及待测水深位置对应的经纬度之后,将得到的待测水深及待测水深位置对应的经纬度进行存储,并同时对时间进行存储。
上述测量方法,通过测得的蓝/绿激光光程、红外/近红外激光光程、无人机飞行姿态角信息计算得到待测位置的水深值。进而结合GPS定位信息,通过对某个区域的水深进行分布式定位测量,可绘制水下地形图。上述测量方法基于激光水深测量系统,该系统结构简单、成本低,尺寸重量小,可实现小型化多旋翼无人机搭载,其测深精度更高,可实现随时随地单人测量,能够满足大部分浅水测深需求。
上述实施例用来解释本发明,而不是对本发明进行限制,在本发明的精神和权利要求的保护范围内,对本发明做出的任何修改和改变,都落入本发明的保护范围。
- 激光水深测量系统及方法
- 激光测量系统和激光测量系统中的节能控制方法