光学设备
文献发布时间:2023-06-19 18:32:25
技术领域
本公开的实施方式涉及一种光学设备。
背景技术
近年来,对用于汽车的自动驾驶和驾驶辅助系统的研究已经取得进展,并且作为感测手段的车载雷达已经引起了注意。
在车载雷达中,调频连续波(FMCW)雷达被广泛地用作可以测量相对于物体的距离和速度的雷达,以及用作使用可以检测微弱反射波的外差法的雷达。电磁波的指向性和天线的小型化的开发正在进行中。
在这些开发中,还进行了对FMCW光检测和测距(LiDAR)的研究,旨在通过用激光代替电磁波来提高指向性、减小尺寸和减小功耗。
这种FMCWLiDAR的光源需要相对于时间来扫频波长,并且已知通过直接调制谐振腔长度来改变波长的微机电系统(MEMS)可调谐激光器。
例如,日本专利No.6328112记载了一种可调谐激光器,以在整个具有中心波长的辐射波长带上的输出功率谱和平均辐射功率来发射可调谐辐射光。
该可调谐激光器包括MEMS驱动机构,该MEMS驱动机构包括设有第一反射镜和第二反射镜的光学谐振器、第一反射镜与第二反射镜之间的增益区域、间距调谐区域、以及安装在刚性支撑构造上的可变形电介质膜,该刚性支撑构造在整个波长带上是透明的。MEMS驱动机构调整间距。
MEMS驱动机构具有在100至1000MPa范围内的薄膜应力值。
通过由具有直径大于50μm且小于致动器直径的中央板来控制的挤压膜阻尼效应,MEMS驱动机构的频率响应具有实质上增加的阻尼。
光学共振器的自由光谱区(FSR)超过中心波长的5%。
可调谐激光器在整个波长带上以基本上单一的垂直和水平模式来动作。
MEMS驱动机构具有以大约超过1kHz的6dB的带宽来调谐的波长的频率响应。
引文列表
专利文献
[专利文献1]日本专利第6328112号公报
发明内容
技术问题
由于传统的MEMS可调谐激光器使用静电引力来调制谐振腔长度(即,两个平行反射镜之间的距离),所以驱动电压和反射镜的移位的线性变得不足以获得期望的波长。
此外,由于在制造中不能将谐振腔长度的初始值精确地调整到振荡波长的整数倍的间隔,因此产生的问题是,在振荡时,必须将高电压施加到反射镜的可移动部来移动反射镜以获得满足振荡条件的谐振腔长度。
本发明的目的是提供一种光学设备,该光学设备改善振荡波长对于驱动电压的线性,并且实现具有期望振荡波长的光
解决问题的方案
根据本公开技术的实施方式的光学设备,包括:第一反射部;第二反射部;弹性支撑单元,其支撑所述第二反射部;在所述弹性支撑单元上的压电元件;发光部,被配置为发射具有振荡波长的光,以及电路,被配置为输出用于向所述压电元件施加驱动电压以使所述弹性支撑单元弹性变形的信号。所述弹性支撑单元的所述变形改变所述第一反射部和所述第二反射部之间的距离,来改变从所述发光部发射的光的所述振荡波长。
根据本公开技术的另一个实施方式的光学设备,包括:第一反射部;第二反射部;支撑所述第二反射部的至少三个弹性支撑单元;分别位于所述至少三个弹性支撑单元上的压电元件,以及电路,被配置为将彼此独立的驱动信号分别输出到所述至少三个弹性支撑单元的所述压电元件,以使所述至少三个弹性支撑单元彼此独立地弹性变形。所述至少三个弹性支撑单元的所述变形改变所述第一反射部和所述第二反射部之间的平面平行度。
本发明的效果
本公开的实施例提供了一种光学设备,其通过改善振荡波长相对于驱动电压的线性来实现具有期望振荡波长的光。
附图说明
附图旨在记述本发明的示例性实施方式,而不应被解释为限制其范围。除非明确指出,否则附图不应被视为按比例绘制。另外,在所有附图中,相同或相似的附图标记表示相同或相似的部件。
图1所示是实施方式的可调谐激光器的整体构成的图。
图2所示是半VCSEL元件的详细构造的一个例图。
图3所示是第二反射器的支撑构造的第一示例的平面图。
图4所示是沿图3的线AA截取的剖视图。
图5所示是第二反射器的支撑构造的第二示例的平面图。
图6所示是图5的支撑构造中的第二反射器的驱动状态的立体图。
图7所示是图5的支撑构造中的第二反射器的驱动状态的侧视图。
图8所示是图1的可调谐激光器中的驱动电压与谐振腔长度的关系图。
图9是根据比较例的使用静电引力的MEMS可调谐激光器中的驱动电压与谐振腔长度的关系图。
图10所示是第二反射器的支撑构造的第三示例的平面图。
图11A和图11B所示是本公开的实施方式所涉及的由图1中的可调谐激光器进行的波长扫频的图示。
图12所示是半VCSEL元件和第二反射器之间的间距的长度与振荡波长之间的关系的模拟结果的曲线图。
图13所示是根据本公开的实施方式的变形例的可调谐激光器的与图1对应的图。
图14所示是根据本公开的实施方式的变形例修改的可调谐激光器例的与图6对应的图。
图15A所示是本公开的实施方式所涉及的可调谐激光器中的温度与谐振腔长度的关系图。
图15B所示是本公开的实施方式所涉及的可调谐激光器中的温度与波长的关系图。
图16所示是第二反射器的支撑构造的一例的平面图。
图17所示是沿图16的线AA截取的剖视图。
图18所示是图15和16的支撑构造中的第二反射器的驱动状态的侧视图。
图19所示是本公开的实施方式所涉及的可调谐激光器中的驱动电压与谐振腔长度的关系图。
图20所示是根据比较例的使用静电引力的MEMS可调谐激光器中的驱动电压与谐振腔长度的关系图。
图21所示是用于向三个弹性支撑单元的压电元件提供独立的驱动信号的构成的功能框图。
图22所示是伴随有将不同电压施加到两个连接部来使反射器倾斜的动作的状态的图示。
图23所示是连接部的移位量与连接端之间的距离变化时获得的倾斜之间的关系的一例的图。
图24A和图24B所示是本公开的实施方式所涉及的由图1中的可调谐激光器进行的波长扫频的图示。
图25所示是半VCSEL元件和第二反射器之间的间距的长度与振荡波长之间的关系的模拟结果的曲线图。
图26所示是本公开的实施方式的第一变形例的可调谐激光器的图。
图27所示是本公开的实施方式的第二变形例的可调谐激光器的图。
图28A所示是与未校正倾斜的可移动反射器元件接合的半VCSEL元件的剖视图。
图28B所示是与具有第二反射器和用于高速驱动的可移动反射器构造的可移动反射器元件接合的半VCSEL元件的剖视图。
图29A所示是第二反射器的倾斜调整的图。
图29B所示是对压电元件施加的电压信号的图。
图30所示是可移动反射器元件和半VCSEL元件之间的平面平行度的校准的框图。
图31所示是本公开的实施方式所涉及的校准期间驱动信号源的相位与可调谐激光器的光功率之间的关系图。
具体实施方式
本文使用的词仅用于说明特定实施例的目的,并不意图限制本发明。如本文所使用的,单数形式"一"、"一个"和"该"旨在也包括复数形式,除非上下文另有明确说明。
在描述附图所示的实施方式时,为了清楚起见采用了特定词。然而,本说明书的公开内容并不旨在限于所选择的特定词,并且应当理解为,各特定要素包括具有类似功能、以类似方式操作并且实现类似结果的所有技术等同物。
以下,参照附图对实施方式进行说明。在所有附图中,相同的附图标记被应用于相同或相应的部件,并可以省略其冗余描述。
参照图1~图31,对本实施方式所涉及的可调谐激光器(光学设备)10进行详细说明。
以下说明中的X、Y和Z方向以附图中绘制的箭头线方向为基准。注意,在本公开中,"驱动电压"可以被解读为"驱动信号"。
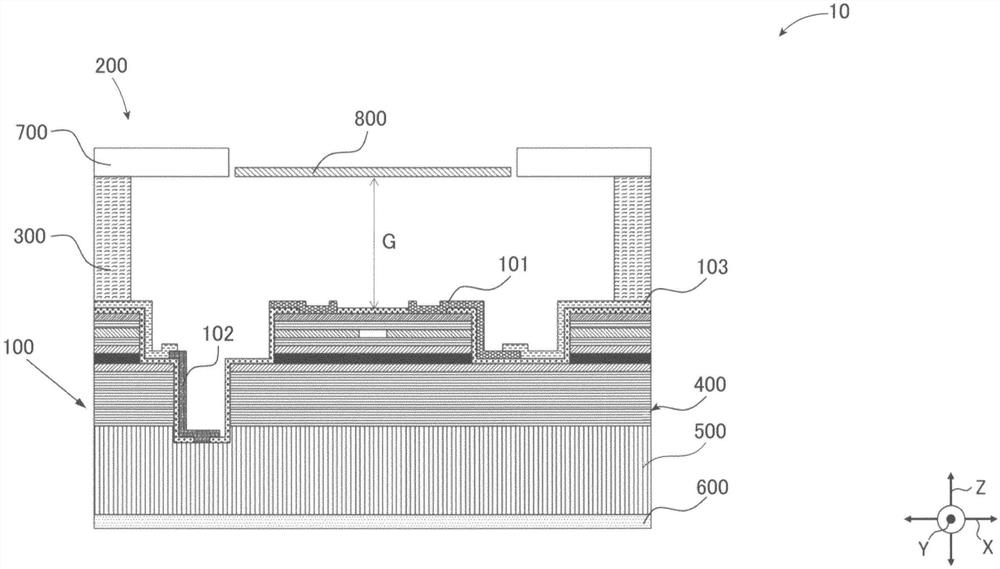
图1所示是本实施方式所涉及的可调谐激光器10的整体构成图。
可调谐激光器10包括作为发光部的半垂直腔表面发射激光器(VCSEL)元件100、可移动反射器元件200、以及用于保持或限制半VCSEL元件100和可移动反射器元件200的相对位置的接合层300。
半VCSEL元件100和可移动反射器元件200具有在XY平面中扩展的矩形形状,并且接合层300具有在Z方向上延伸的矩形框架形状。接合层300连接可移动反射器元件200在Z方向上的下端面与半VCSEL元件100在Z方向上的上端面。可移动反射器元件200的下端面和半VCSEL元件100的上端面分别构成可移动反射器元件200和半VCSEL元件100的XY平面。
半VCSEL元件100具有以Z方向上从上层到下层的顺序来层叠的第一反射器400(第一反射镜)、半导体基板500、防反射膜600。
半VCSEL元件100具有电极101、电极102、以及将电极101和电极102电连接的配线103。
可移动反射器元件200包括具有在XY平面上延伸的矩形框架形状的固定支撑单元700,以及被支撑在固定支撑单元700的XY平面的中心的矩形形状的第二反射器800(第二反射镜)。
第二反射器800由固定支撑单元700支撑的方式是,可以从与通过接合层300规定的第一反射器400的基准对置位置开始来接近和离开第一反射器400。(详细将在后面记述)。
在第一反射器400和第二反射器800之间存在空间,并且该空间为真空或充满气体。
作为半VCSEL元件100的发光源的有源层105(参照图2后述)设置在第一反射器400和第二反射器800之间。
通过扫频来自半VCSEL元件100的光的波长并改变Z方向上的第一反射器400和第二反射器800之间的距离(即,间距)G,可调谐激光器10改变来自半VCSEL元件100的光的振荡波长。
虽然在图1中,为了方便起见,指示第一反射器400和第二反射器800之间的距离G的箭头从第二反射器800延伸到第一反射器400的稍上方,但箭头的下端被假定是从第一反射器400引出的。
稍后将详细描述用于在Z方向上改变从第一反射器400到第二反射器800的距离G的构造。
图2所示是半VCSEL元件100的详细构造的一个例图。
半VCSEL元件100具有层叠在防反射膜600的上表面上的半导体基板500。
半导体基板500包括诸如n-GaAs基板的半导体基板。
第一反射器400层叠在半导体基板500的上表面上。
第一反射器400构成半导体多层膜反射器,该半导体多层膜反射器具有从半导体多层膜反射器的上层到下层依次层叠的第一半导体层410、第二半导体层420和第三半导体层430。
构成第一反射器400的半导体层的数量和配置是灵活的(不限于这里所示的),并且可以进行各种设计变更。
构成第一反射器400的半导体层(例如,第一半导体层410、第二半导体层420和第三半导体层430)包括例如n-Al0.9Ga0.1As的低折射率层和n-Al0.2Ga0.8As的高折射率层。
为了减小电阻,可以在构成第一反射器400的半导体层(即,折射率层)之间设置组成逐渐从一种组成变化到另一种组成的组成坡度层。组成坡度层的厚度例如为20nm。
优选的是将各半导体层或各折射率层的光学膜厚设定为λ/4,其中λ是振荡波长,并包括相邻的组成坡度层的1/2。
在这种情况下,当层的光学厚度为λ/4时,实际膜厚度D为λ/4n,其中n为该层的介质的折射率。
在半导体基板500的上表面上,在第一反射器400以外,或者作为第一反射器400的部分组件,形成有电极101、电极102、配线103以及间隔层104、有源层105、选择氧化层106、接触层107、绝缘层108、台面109、凹槽110、开口111、开口112。
间隔层104包括例如未掺杂的AlGaInP层,并形成在半导体多层的第一反射器400和有源层105之间的边界层上。
包括间隔层104和有源层105的部分也被称为谐振器构造或谐振器区域,包括相邻的组成坡度层的1/2,并且具有一个波长(λ)的光学厚度。
两个间隔层104在Z方向上被配置为在两个间隔层104之间具有有源层105。
有源层105例如具有三重量子阱构造,其具有三层的量子阱层和四层的垒层。
例如,各量子阱层是InGaAs层,各势垒层是AlGaAs层。
选择氧化层106包括氧化区域106A和非氧化区域106B。
例如,由p-AlAs组成的具有30nm厚度的选择氧化层106被设置在半导体多层的第一反射器400上。
选择氧化物层106例如设置在从间隔层104数起为第二对高折射率层和低折射率层内。
选择氧化层106可以设置在诸如组成坡度层和中间层的层之间。在本实施方式中,选择氧化物层106包括实际被氧化的层。
接触层107包括例如p-GaAs层,并形成在半导体多层的第一反射器400上。
台面109和凹槽110是通过部分地蚀刻半导体多层(例如,第一半导体层410、第二半导体层420和第三半导体层430)的第一反射器400、间隔层104、有源层105和接触层107来形成的。
绝缘层108包含例如SiN、SiON或SiO2,并且覆盖台面109。
露出台面109的接触层107的一部分的开口111形成在绝缘层108中。
在平面图中,开口111被形成为与选择氧化物层106的非氧化区域106B重叠。
通过开口111与接触层107电连接的电极101形成在台面109的绝缘层108上。
作为电极101,例如,可以使用从绝缘层一侧开始以钛(Ti)/铂(Pt)/金(Au)的顺序来层叠的层叠膜。
绝缘层108覆盖凹槽110。
在绝缘层108中,开口112露出半导体基板500的一部分。
通过开口112与接触层107电连接的电极102形成在凹槽110的绝缘层108上。
作为电极102,例如可以使用从半导体基板500一侧开始以锗合金(AuGe)/镍(Ni)/金(Au)的顺序来层叠的层叠膜。
配线103与电极101和电极102电连接。
作为配线103,例如,可以使用从半导体基板500一侧开始以钛(Ti)/铂(Pt)/金(Au)的顺序来层叠的层叠膜。
在本实施方式中,作为"发光部"的一例已经说明了半VCSEL元件100。可替换地,作为"发光部"可以使用激光二极管(LD)或发光二极管(LED)。
可以使用边缘发射激光器(EEL)来作为"发光部"。
更进一步地,作为"发光部",既可以是单个光源,也可以是同时发射光的多个光源(例如,VCSEL阵列光源)。
"发光部"的具体方式中具有自由度,能够进行各种设计变更。
在传统的MEMS可调谐激光器中,因为使用静电引力来调制谐振腔长度,即,平行地彼此面对的两个反射镜之间的距离,所以驱动电压(驱动信号)和移位量的线性变得不足以获得所期望的波长。
此外,由于在制造中不能将谐振腔长度的初始值精确地调整到振荡波长的整数倍的间隔,因此产生的问题是,在振荡时,必须施加高电压来移动反射镜的可移动部至满足振荡条件的谐振腔长度。
由于MEMS一侧的反射镜的位置与驱动电压的平方成比例,在使用静电引力的MEMS可调谐激光器中,驱动电压(驱动信号)和腔长度不具有线性。
反射镜在MEMS一侧上的位置是由未施加电压的两个反射镜之间的初始间距以及由电势差产生的静电引力和构成MEMS的驱动构造的弹簧的恢复力之间的平衡条件来确定的。
当驱动电压增加时,作为引起两个反射镜彼此吸引的力的静电引力增加,谐振腔长度就变短。
当电压范围宽时,反射器的移位量就偏离线性。
为了避免这种情况,也可以考虑涉及预先歪曲驱动电压以使波长相对于驱动电压为线性变化的方法。
然而,由于反射镜之间的1μm至2μm的初始间隔随着设备制造中的变动以及温度变化而改变,所以难以实现具有超高精度的初始间隔控制。
这种涉及在静态条件下预先歪曲驱动电压的方法不能在谐振腔长度的变化中具有线性。
更进一步地,当两个反射镜之间的间隔改变为初始间隔的1/3或更大时,由电势差产生的静电引力超过MEMS的驱动构造的弹簧的恢复力,将引起膜彼此吸引的吸合效应。其结果是,MEMS可调谐激光器不工作。
换句话说,使用静电引力的MEMS可调谐激光器中的反射镜的可移动范围被限制为小于初始间隔的1/3。
鉴于上述情况,本实施方式采用的构造是,压电元件在作为MEMS一侧反射器的驱动源的弹簧上形成为膜。
在该构造中,通过使用所施加的电压和压电元件的体积减小量的线性来相对于电压线性地调制谐振腔长度。
当在与MEMS一侧的反射器连接的具有曲折构造的弹簧上形成电极以使压电元件夹在弹簧和电极之间并施加电压时,压电元件的体积随着所施加的电压会线性地减小。
根据该体积减小产生的膜的面内方向上的应力,曲折构造的弹簧在垂直于压电元件的膜的平面的方向上变形。
此时,压电元件的应力和变形量之间保持线性。
更进一步地,由于弹簧与反射器连接,所以弹簧的变形量和反射器的移位量之间保持为线性的关系。其结果是,相对于电压可以线性地移动反射器。
另外,由于该关系不取决于谐振腔长度的初始值,所以在静电驱动MEMS中能够高精度地控制谐振腔长度。
更具体地,在本实施方式中,支撑第二反射器800的弹性支撑单元900和设置在弹性支撑单元900中的压电元件1000形成在可移动反射器元件200的固定支撑单元700中。通过向压电元件1000施加驱动电压改变弹性支撑单元,来改变第一反射器400和第二反射器800之间的距离,从而改变从半VCSEL元件发射的光的振荡波长。
第一反射器400和半VCSEL元件100形成为单个单元来作为第一基板,并且第二反射器800、弹性支撑单元900和压电元件1000形成为单个单元来作为第二基板。这允许可调谐激光器10的简单构造。
例如,半VCSEL元件100构成第一基板,可移动反射器元件200构成第二基板。
图3所示是第二反射器800的支撑构造(即,MEMS一侧反射器的支撑构造)的第一示例的平面图。
图4所示是沿图3的线AA截取的剖视图。
如图3所示,第二反射器800通过介入到在XY平面中扩展的固定支撑单元700的中心处的贯通孔700X被支撑浮动状态。
连接端810和连接端820被形成为分别从第二反射器800的上侧和下侧突出,并且连接部710和连接部720被形成为分别从固定支撑单元700的上侧和下侧突出。
连接端810和连接部710通过弹性支撑单元910连接,连接端820和连接部720通过弹性支撑单元920连接。
弹性支撑单元910和920在第二反射器800的周围被设置为彼此分离。
弹性支撑单元910包括从连接部710向右延伸的第一臂911、从第一臂911向下折叠的折叠部912、以及从折叠部912向左延伸并连接到连接端810的第二臂913。换句话说,弹性支撑单元910形成为曲折构造。
压电元件1011设置在第一臂911的左半部分上,并且是当驱动电压施加到压电元件1011时弹性变形的移位部911A。
压电元件1011不设置在第一臂911的右半部分上,并且是当驱动电压施加到压电元件1011时不弹性变形的移位限定部911B。
压电元件1013设置在第二臂913的右半部分上,并且是当驱动电压施加到压电元件1013时弹性变形的移位部913A。
压电元件1013不设置在第二臂913的左半部分上,并且是当驱动电压施加到压电元件1013时不弹性变形的移位限定部913B。
如上所述,弹性支撑单元910包括彼此相邻延伸的第一臂911和第二臂913,以及在延伸方向上连接第一臂911和第二臂913的相同侧的端部的折叠部912。压电元件1011设置在第一臂911上,压电元件1013设置在第二臂913上。
压电元件1011和压电元件1013配置在不同的位置处,该位置在第一臂911和第二臂913的延伸方向上彼此错位。换句话说,压电元件1011和压电元件1013不沿着与第一臂911和第二臂913的延伸方向为正交的方向对齐。
弹性支撑单元920包括从连接部720向右延伸的第一臂921、从第一臂921向上折叠的折叠部922、以及从折叠部922向左延伸并连接到连接端820的第二臂923。换句话说,弹性支撑单元920形成为曲折构造。
压电元件1021设置在第一臂921的左半部分上,并且是当驱动电压施加到压电元件1021时弹性变形的移位部921A。
压电元件1021不设置在第一臂921的右半部分上,并且是当驱动电压施加到压电元件1021时不弹性变形的移位限定部921B。
压电元件1023设置在第二臂923的右半部分上,并且是当驱动电压施加到压电元件1023时弹性变形的移位部923A。
压电元件1023不设置在第二臂923的左半部分上,并且是当驱动电压施加到压电元件1023时不弹性变形的移位限定部923B。
如上所述,弹性支撑单元920包括彼此相邻延伸的第一臂921和第二臂923,以及在延伸方向上连接第一臂921和第二臂923的相同侧的端部的折叠部922。压电元件1021设置在第一臂921上,压电元件1023设置在第二臂923上。
压电元件1021和压电元件1023配置在不同的位置处,该位置在第一臂921和第二臂923的延伸方向上彼此错位。换句话说,压电元件1021和压电元件1023不沿着与第一臂921和第二臂923的延伸方向为正交的方向对齐。
如图4所示,固定支撑单元700包括支撑层730、氧化绝缘层740、硅有源层750和绝缘层760,它们在Z方向上从下层侧到上层侧以此顺序层叠。
移位限定部911B和移位限定部921B包括硅有源层750和绝缘层760,它们在Z方向上从下层侧到上层侧以此顺序层叠(移位限定部911B和移位限定部921B是部分地共享固定支撑单元700的层叠构造)。
移位部913A(包括压电元件1013)和移位部923A(包括压电元件1023)包括在硅有源层750的上表面上形成压电元件1000的致动器。
压电元件1000包括在Z方向上从下层侧到上层侧以此顺序层叠的下电极1000A、压电材料1000B和上电极1000C。
通过对下电极1000A和上电极1000C施加驱动电压,移位部913A和移位部923A弹性变形。
绝缘层760和保护膜1100被设置在压电元件1000(上电极1000C)的上表面上。
在本实施方式中,通过对压电元件1011、1013、1021和1023施加驱动电压以使弹性支撑单元910和920弹性变形,并改变第一反射器400和第二反射器800之间的距离,来改变由半VCSEL元件100产生的光的振荡波长。
通过将曲折构造上的致动器(压电元件1011、1013、1021、1023)、移位限定部911B、913B、921B、923B以及折叠部912、922的组合产生的移位经由连接端810、820,作为可移动反射器的第二反射器800在保持固定支撑单元700和第二反射器800之间的平行性的情况下,在Z方向上平移地移动。
在Z方向上的这种平移移动是由通过向致动器的下电极1000A和上电极1000C施加驱动电压而产生的电势差引起的。
图5所示是第二反射器800的支撑构造(MEMS一侧反射器的支撑构造)的第二示例的平面图。
图6所示是图5的支撑构造中的第二反射器800的驱动状态的立体图。图7所示是图5的支撑构造中的第二反射器800的驱动状态的侧视图。
除了设置在XY平面中延伸的固定支撑单元700的右半部分上的弹性支撑单元910、920之外,第二示例还包括在XY平面中延伸的固定支撑单元700的左半部分上的弹性支撑单元930和940。
弹性支撑单元910、920、930、940在第二反射器800的周围彼此分开。
如上所述,通过在XY平面中延伸的固定支撑单元700的四个角处对称地设置四个弹性支撑单元910、920、930、940,可以更稳定地维持固定支撑单元700和作为可移动反射器的第二反射器800之间的平行度。
弹性支撑单元930包括从连接部710向左延伸的第一臂931、从第一臂931向下折叠的折叠部932、以及从折叠部932向右延伸到连接端810的第二臂933。换句话说,弹性支撑单元930形成为曲折构造。
压电元件1031设置在第二臂931的右半部分上,并且是当驱动电压施加到压电元件1031时弹性变形的移位部931A。
压电元件1031不设置在第一臂931的左半部分上,并且是当驱动电压施加到压电元件1031时不弹性变形的移位限定部931B。
压电元件1033设置在第二臂933的左半部分上,并且是当驱动电压施加到压电元件1033时弹性变形的移位部933A。
压电元件1033不设置在第二臂933的右半部分上,并且是当驱动电压施加到压电元件1033时不弹性变形的移位限定部933B。
如上所述,弹性支撑单元930包括彼此相邻延伸的第一臂931和第二臂933,以及在延伸方向上连接第一臂931和第二臂933的相同侧的端部的折叠部932。压电元件1031设置在第一臂931上,压电元件1033设置在第二臂933上。
压电元件1031和压电元件1033配置在不同的位置处,该位置在第一臂931和第二臂933的延伸方向上彼此错位。换句话说,压电元件1031和压电元件1033不沿着与第一臂931和第二臂933的延伸方向为正交的方向对齐。
弹性支撑单元940包括从连接部720向左延伸的第一臂941、从第一臂941向上折叠的折叠部942、以及从折叠部942向右延伸并连接到连接端820的第二臂943。换句话说,弹性支撑单元940形成为曲折构造。
压电元件1041设置在第二臂941的右半部分上,并且是当驱动电压施加到压电元件1041时弹性变形的移位部941A。
压电元件1041不设置在第一臂941的左半部分上,并且是当驱动电压施加到压电元件1041时不弹性变形的移位限定部941B。
压电元件1043设置在第二臂943的左半部分,并且是当驱动电压施加到压电元件1043时弹性变形的移位部943A。
压电元件1043不设置在第二臂943的右半部分,并且是当驱动电压施加到压电元件1043时不弹性变形的移位限定部943B。
如上所述,弹性支撑单元940包括彼此相邻延伸的第一臂941和第二臂943,以及在延伸方向上连接第一臂941和第二臂943的相同侧的端部的折叠部942。压电元件1041设置在第一臂941上,压电元件1043设置在第二臂943上。
压电元件1041和压电元件1043被设置成不与正交于第一臂941和第二臂943的延伸方向的方向(即,附图的垂直方向)平行。
压电元件1041和压电元件1043配置在不同的位置处,该位置在第一臂941和第二臂943的延伸方向上彼此错位。换句话说,压电元件1041和压电元件1043不沿着与第一臂941和第二臂943的延伸方向为正交的方向对齐。
在本实施方式中,通过对压电元件1011、1013、1021、1023、1031、1033、1041、1043施加驱动电压以使弹性支撑单元910、920、930、940弹性变形,并改变第一反射器400和第二反射器800之间的距离,来改变由半VCSEL元件100产生的光的振荡波长。
对压电元件施加驱动电压时,压电元件的体积会改变。
由于压电元件和臂是物理连接的,所以在臂的压电元件附近产生面内应力。
受到应力的臂弹性地变形来释放应力。
此时,对臂部的XY方向的尺寸比附加各向异性来缩短臂部的Z方向的厚度,在Z方向上会引起臂部主要是翘曲,而压电元件也在维持规定的曲率半径的状态下在Z方向上翘曲。
由压电元件产生的臂的翘曲被传递到在没有压电元件的移位限定部。
由于重力引起的移位限定部在Z方向上的翘曲比压电元件的翘曲小得多,因此可以忽略。换句话说,移位限定部的翘曲等同于可以忽略不计的小的弹性变形。
图7所示是作为示例的弹性支撑单元920的放大图,并且弹性支撑单元910、930、940具有类似的构成。
如图7所示,弹性支撑单元920的折叠部922在Z方向上的移位Z1至少增加由压电元件1021和1023产生的翘曲(减小曲率半径),和延长第一臂921的移位限定部921B。
第一臂921从自由状态以角度θ1向折叠部922倾斜,并且在折叠部922被折回之后,第二臂923从自由状态以角度θ2倾斜(角度θ1和角度θ2之间的差是第一臂921和第二臂923之间的倾斜角)。
当第二臂923以具有与第一臂921的压电元件具有相同尺寸的压电元件来驱动时,第一臂921的倾斜被抵消。
因此,在设置在第二臂923的端部处的连接端820,作为可移动反射器的第二反射器800可以在Z方向上移动,且从驱动前开始维持固定支撑单元700的XY平面与作为可移动反射器的第二反射器800之间的平行度。
形成在第一臂921和第二臂923上的压电元件在XY平面上的尺寸可以相同也可以不同。
当形成在第一臂921和第二臂923上的压电元件在XY平面上的尺寸不相同时,调节施加到各压电元件的电压,以使得在各压电元件中产生的翘曲相同。
对压电元件施加的驱动电压是直流电压,也可以是电压随时间变化的正弦波形、余弦波形、三角波形。
在电压的调制频率和可移动反射器元件的谐振频率彼此分离的条件下,如上所述地移位量相对于电压的线性得到维持。
压电元件通过施加电压来驱动,并在电压和所产生的应力之间存在线性。
由于所产生的应力和臂的变形量也具有线性,因此所施加的电压和移位量具有线性。
图8所示是本实施方式中的可调谐激光器10的驱动电压与谐振腔长度的关系图。图9所示是传统的使用静电引力的MEMS可调谐激光器的驱动电压与谐振腔长度的关系图。
如图8所示,根据本实施方式的可调谐激光器10,实现了驱动电压和谐振腔长度之间的高的线性。
另一方面,如图9所示,由于使用静电引力的传统的MEMS可调谐激光器中的MEMS一侧上的反射镜的位置与驱动电压的平方成比例,并且当两个反射镜之间的间隔移位到初始间隔的1/3或更大时膜彼此吸引的吸合效应(pull-ineffect),导致不足以获得驱动电压和谐振腔长度之间的线性。
图10所示是第二反射器800的支撑构造(MEMS一侧反射器的支撑构造)的第三示例的平面图。
在第三示例中,压电元件1011X被配置在第一臂911的移位限定部911B的在第一示例中未设置压电元件的区域处,压电元件1013X被配置在第二臂913的移位限定部913B的区域处,压电元件1021X被配置在第一臂921的移位限定部921B的区域处,压电元件1023X被配置在第二臂923的移位限定部923B的区域处。
压电元件1011、1013、1021、1023、1011X、1013X、1021X、1023X沿着与第一臂911和第二臂913的延伸方向正交并且还与第一臂921和第二臂923的延伸方向正交的方向(即,附图的垂直方向)设置。
在第三示例中,压电元件包括第一组压电元件1011、1013、1021、1023以及第二组压电元件1011X、1013X、1021X、1023X。
在对第一组压电元件施加驱动电压时,不对第二组压电元件施加驱动电压。相反地,对第二组压电元件施加驱动电压时,不对第一组压电元件施加驱动电压。
在第三示例中,对压电元件1011施加电压时,第一臂911的移位部911A的区域用作移位部,移位部911B的区域用作移位限定部。对压电元件1011X施加电压时,第一臂911的移位限定部911B的区域用作移位部,移位部913A的区域用作移位限定部。
对压电元件1013施加电压时,第二臂913的移位部913A的区域用作移位部,移位部913B的区域用作移位限定部。对压电元件1013X施加电压时,第二臂913的移位部913B的区域用作移位部,并且第二臂913的移位部913A的区域用作移位限定部。
对压电元件1021施加电压时,第一臂921的移位部921A的区域用作移位部,第一臂921的移位限定部921B的区域用作移位限定部。对压电元件1021X施加电压时,第一臂921的移位部921B的区域用作移位部,第一臂921的移位部921A的区域用作移位限定部。
对压电元件1023施加电压时,第二臂923的移位部923A的区域用作移位部,第二臂923的移位限定部923B的区域用作移位限定部。对压电元件1023X施加电压时,第二臂923的移位限定部923B的区域用作移位部,第二臂923的移位部923B的区域用作移位限定部。
在第一示例中,移位限定部是多个臂中没有压电元件的部分。另一方面,在第三示例中,移位限定部是多个臂中具有压电元件且没有施加电压的部分。
在第三示例中,当包括在第一组和第二组压电元件中的一组中的压电元件中偶然发生故障或动作不良时,可调谐激光器10可以通过对另一组施加电压来动作,而不会受前述压电元件的故障或动作不良的影响。
图11A和11B所示是本实施方式的可调谐激光器10的波长扫频的示例图。
可调谐激光器10的激光振荡波长由构成有源层105和谐振器构造的材料中的发射光谱(即波长分布)特性来规定。
谐振器构造的特点是第一反射器400和第二反射器800之间在Z方向上的距离G,以及第一反射器400和第二反射器800之间存在的材料的折射率和尺寸。
有源层105利用通过电极注入到半VCSEL元件100里的电流来发光,并且谐振光(即,振荡光)的波长随着第一反射器400和第二反射器800之间在Z方向上的距离G的变化而改变。
图11A所示是向Z方向的下方发射的谐振光(即,振荡光)的图。图11B所示是向Z方向的上方发射的谐振光(即,振荡光)的图。
由于可以通过改变作为可移动反射器元件的第二反射器800在Z方向上的位置来改变第一反射器400和第二反射器800之间在Z方向上的距离G,所以可以调制谐振光(即,振荡光)的波长。
特别地,在本实施方式中,通过利用弹性支撑单元900和压电元件1000来设计第二反射器800的支撑构造,可以高精度地控制第一反射器400和第二反射器800之间在Z方向上的距离G。
其结果是,改善了振荡波长相对于驱动电压的线性,并且获得了具有期望振荡波长的光。
图12所示是半VCSEL元件100的第一反射器400和第二反射器800之间的间隔的长度与振荡波长之间的关系的模拟结果图。
由半VCSEL元件100发射的振荡光被发射到具有较低反射率的第一反射器400或第二反射器800。
因此,通过调整第一反射器400和第二反射器800之间的反射率的大小,可以调整半VCSEL元件100的振荡光的发射方向。
当第一反射器400的反射率被设置为低于第二反射器800的反射率时,振荡光在Z方向上向下发射(图11A)。当第一反射器400的反射率被设置为高于第二反射器800的反射率时,振荡光在Z方向上向上发射(图11B)。
包括包含多种金属的多层金属膜的结合层分别形成在半VCSEL元件100(第一反射器400)和第二反射器800上。
例如,通过原子扩散接合方法将各元件上的接合层彼此接合,在第一反射器400和第二反射器800之间可以获得空间。
半VCSEL元件100的有源层105设置在谐振器构造的中心,该中心是与电场的驻波中的波腹相对应的位置,从而获得高的受激发射概率。
图13所示是本实施方式的可调谐激光器10的变形例的与图1对应的图。
如图13所示,一个第二反射器800设置有多个半VCSEL元件100。
具体来说,对于一个第二反射器800设置有在XY平面上在X方向上彼此相邻的三个半VCSEL元件100X、100Y、100Z。
该三个半VCSEL元件100X、100Y、100Z也可以共享第一反射器400、半导体基板500、防反射膜600。
半VCSEL元件的数量和设置具有一定程度的自由度,各种设计变更是可能的。例如,第二反射器设置有两个或四个或更多个半VCSEL元件。换句话说,半VCSEL元件的数量不限于三个,可以是任意多个(即,第二基板包括多个发光部)。可替换地,代替或除了在XY平面内的X方向或Y方向上配置多个半VCSEL元件以外,第二反射器在Z方向上可以设置多个半VCSEL元件。
图14所示是本实施方式的可调谐激光器10的变形例的与图6对应的图。
在图14中,在作为可移动反射器的第二反射器800内部,追加显示了用于高速驱动的可移动反射器构造800X。
利用半VCSEL元件100与第二反射器800之间的接合层300接合在一起的半VCSEL元件100(第一反射器400)与第二反射器800之间的间隔的长度取决于可调谐激光器10的使用环境(例如,温度)。
该间隔的变化长度为几微米。通过利用根据可调谐激光器10的使用环境(例如,温度)而准备(预设)的电压来静态地驱动曲折构造,可以固定振荡波长的中心。
在中心波长固定的情况下,用于高速驱动的可移动反射器构造800X在Z方向上通过调制信号移位几十nm,从而无论环境变化都在中心波长保持恒定的情况下在波长的一定带宽内扫频振荡波长。
这样,通过提供处理相对大的驱动范围的第二反射器800和处理相对小的驱动范围的可移动反射器构造800X(通过划分功能),可以以更高的精度来控制半VCSEL元件100(第一反射器400)和第二反射器800之间的间隔。
该构成进一步提高振荡波长相对于驱动电压的线性,使光具有所需的振荡波长。
用于高速驱动的可移动反射器构造800X设置有压电元件。将随时间连续波动的电压和周期性变化的调制信号施加到压电元件中,可以使可移动反射器构造以MHz量级的数十到数百纳米的驱动速度在Z方向上移位。
图15A所示是本公开的实施方式所涉及的可调谐激光器中的谐振器的光路长度与温度的关系图。图15B所示是振荡波长与温度的关系图。
随着可调谐激光器的温度由于例如环境温度改变或激光器的模块产生的热而改变,可移动反射器元件的材料与半VCSEL元件的材料之间的热膨胀系数的差异改变可移动反射器元件与半VCSEL元件之间的间隔调谐区域的长度。
此外,可调谐激光器的温度的变化还会改变形成可移动反射器元件和半VCSEL元件的谐振器的材料(例如,半导体材料)的折射率,导致可调谐激光器的谐振器的光路长度变化。使用波长随温度变化而变动的记录数据,预先使要施加到与第二反射器连接的曲折构造的压电元件中的电压歪曲,来维持波长对温度的恒定,从而减小波长随温度的变动。
图30所示是波长校正的功能框图。例如,在光源附近设置温度测量设备,来测量振荡期间的可调谐激光器或其附近的温度。图30中的存储单元存储可调谐激光器在振荡期间的波长、输出功率和温度之间的关系作为相关公式或表,并且还存储压电元件的驱动电压和振荡波长之间的关系。处理器基于所测量到并存储在存储单元中的温度和波长之间的关系来确定振荡波长对于温度为恒定,或者输出功率变为最大的校正电压。根据该电压,驱动信号源驱动压电元件。
当间隔调谐区域的长度变化例如几百纳米的较大量时,这种调整方法是可应用的。为了处理上述量级的变化,通过使用静态电压来致动处理相对小的驱动范围的可移动反射器构造800X,不能获得足够的移位量来抵消随温度的变化量。
鉴于这种情况,在对于温度静态地调节第二反射器的位置的情况下,通过例如正弦波的调制信号以高速来致动处理相对小的驱动范围的可移动反射器构造800X。这可以在维持中心波长对温度的变化的同时高速扫频波长。
如上所述,本实施方式的光学设备包括第一反射器、第二反射器、支撑第二反射器的弹性支撑单元以及设置在弹性支撑单元中的压电元件。
通过向压电元件施加驱动电压以使弹性支撑单元弹性变形,第一反射器和第二反射器之间的距离被改变,并且由发光部发射的光的振荡波长改变。
对确定光的波长的谐振腔长度进行控制的MEMS一侧上的反射器与形成有压电元件的弹性曲折构造连接。
其结果是,改善了振荡波长相对于驱动电压的线性,并且获得了具有所期望振荡波长的光。
本发明并不限定于上述实施方式,能够进行各种变更。
附图所示各部的尺寸、形状、功能等不限于上述实施方式,可以在本发明的效果的范围内适当地改变。
此外,在附图所示各部的尺寸、形状、功能等可以被适当地修改和实施,只要在附图所示各部的尺寸、形状、功能等不偏离本发明的目的即可。
在上述实施方式中,支撑单元被形成为曲折构造,该曲折构造包括彼此相邻延伸的两个臂以及在臂的延伸方向上连接两个臂的相同侧的端部的一个折叠部,并且压电元件形成在两个臂上。
在上述实施方式中,支撑单元形成为曲折构造,该曲折构造可以包括彼此相邻延伸的三个或更多个臂以及两个或更多个折叠部,各折叠部将三个或更多个臂中的两个相邻臂的相同侧上的端部在延伸方向上连接,并且压电元件形成在三个或更多个臂上。
弹性支撑单元包括彼此相邻延伸的多个臂和用于连接多个臂在延伸方向上的相同侧上的端部的折叠部,并且压电元件设置在多个臂上。
在上述实施方式中,作为示例记述了在第二反射器周围彼此分开地设置两个或四个弹性支撑单元的情况,但是在第二反射器周围彼此分开的弹性支撑单元的数量上存在自由度,并且各种设计改变是可能的。
例如,在第二反射器周围可以彼此分开设置至少两个弹性支撑单元,或者至少三个弹性支撑单元。
在传统的MEMS可调谐激光器中,当发光部(例如,半VCSEL元件)和可移动反射器元件(例如,MEMS反射镜)之间的平面平行度低时,即,两个反射器(即,第一反射镜和第二反射镜)之间的平面平行度低时,用于激光发射的阈值电流就会变高。
特别地,在使用静电引力的MEMS可调谐激光器中,两个反射镜之间的平行度趋低,用于激光发射的阈值电流趋高,并且由于在接合时平面平行度的精度是固定的,所以不能获得足够的发光强度。
在该变形例中,可以改善两个反射器的平面平行度,换句话说,可以改善发光单元与反射器之间的平面平行度。
根据该变形例,可以改善两个反射器的平面平行度,换句话说,可以改善发光单元与反射器之间的平面平行度。
在传统的MEMS可调谐激光器中,发光部(例如,半VCSEL元件)和可移动反射器元件(例如,MEMS反射镜)之间的平面平行度低,即,两个反射器(第一和第二)低。两个反射器之间的平行度会引起激光发射的高阈值电流。
特别地,在使用静电引力的MEMS可调谐激光器中,两个反射镜之间的平行度趋低,用于激光发射的阈值电流趋高,并且由于在接合时平面平行度的精度是固定的,所以不能获得足够的发光强度。
发光部(例如,半VCSEL元件)和可移动反射器元件(例如,MEMS镜)之间的平面平行度的降低起因于设备集成时的安装条件。
在MEMS可调谐激光器中,发光部(例如,半VCSEL元件)和可移动反射器元件(例如,MEMS反射镜)被集成在单一设备(device)中,并且在发光部和可移动反射器元件之间设置有间隔。
在各元件所具有的超高反射器中,通过在垂直于元件表面的方向上略微驱动MEMS一侧上的反射器的同时将电流注入到半VCSEL中,来对振荡光附加波长扫频功能。
集成法分为层叠法和接合法。接合法使用用于接合两个元件的接合层,并且两个元件的平面平行度根据膜厚度变化、接合温度和压力而改变。
使用诸如溅射或蒸发的膜形成方法来形成接合层。在膜形成中,膜厚度根据膜形成位置而不同。
需要加热和加压来对形成在各元件上的接合层进行接合。在加热和加压条件中存在位置变化。
接合发光部和可移动反射器元件的接合层不是均匀地变形并且厚度会变化。这减小了发光部(例如,半VCSEL元件)和可移动反射器元件(例如,MEMS反射镜)之间的平面平行度。
在诸如在垂直于平面的方向上具有谐振器的半VCSEL的激光元件中,通过减少在包括两个反射器的谐振器之间振荡的光的损耗来实现低阈值电流、低功耗和高输出。
因此,在容纳上述设备构造的可调谐激光器中,元件(例如,两个反射器)之间的平行度的倾斜因该倾斜量而增加光损耗,并导致阈值电流增加。
在本实施方式中,作为用于支撑第二反射器800的弹性支撑单元900,包括至少三个弹性支撑单元(例如,910、920、930),并且压电元件(例如,1010、1020、1030)分别设置在至少三个弹性支撑单元(例如,910、920、930)上。
然后,将独立的驱动信号施加到至少三个弹性支撑单元(例如,910、920、930)的三个压电元件(例如,1010、1020、1030),并且通过使至少三个弹性支撑单元(例如,910、920、930)独立地弹性变形,来改变第一反射器400和第二反射器800之间的平面平行度,换句话说,半VCSEL元件100和第二反射器800之间的平面平行度。
在本实施方式中,连接MEMS一侧反射器和芯片支撑单元的弹性体的数量是三个或更多个,并且各弹性体由独立信号驱动。
在本实施方式的这种构造中,根据芯片的倾斜来独立地改变各弹性体的驱动量,以改变反射部和弹性体的多个连接部在垂直于芯片表面的方向上的位置。
通过用高刚性材料形成反射部,可以将连接部中的位置差异改变为反射部的倾斜。
通过利用该变化来驱动弹性体以抵消元件之间的倾斜,可以减小谐振器构造中的光的损耗。
图16所示是第二反射器800的支撑构造(即,MEMS一侧反射器的支撑构造)的平面图。
图17所示是沿着图16的线AA截取的第二反射器800的支撑构造的剖视图。
如图16所示,第二反射器800通过在XY平面中延伸的固定支撑单元700的中央部的贯通孔700X被支撑为浮动状态。
在第二反射器800的周围突出形成有连接端810、连接端820和连接端830,并在固定支撑单元700中,在第二反射器800的周围突出形成有连接部710、连接部720和连接部730。
连接端810和连接部710通过弹性支撑单元910连接,连接端820和连接部720通过弹性支撑单元920连接,并且连接端830和连接部730通过弹性支撑单元930连接。
弹性支撑单元910、连接端810和连接部710的组、弹性支撑单元920、连接端820和连接部720的组以及弹性支撑单元930、连接端830和连接部730的组在圆周方向上以相等或近似相等的间隔(180°间隔)来设置。
弹性支撑单元910包括从连接部710延伸到右上对角线的第一臂911、从第一臂911折叠的折叠部912、以及从折叠部912延伸到左下对角线并连接到连接端810的第二臂913。换句话说,弹性支撑单元930形成为曲折构造。
压电元件1011设置在第一臂911的左半部分上,并且是当驱动电压施加到压电元件1011时弹性变形的移位部911A。
压电元件1011不设置在第一臂911的右半部分上,并且是当驱动电压施加到压电元件1011时不弹性变形的移位限定部911B。
第二臂913具备压电元件1013,是当驱动电压施加到压电元件1013时弹性变形的移位部913A。
如上所述,弹性支撑单元910包括彼此相邻延伸的第一臂911和第二臂913,以及在延伸方向上连接第一臂911和第二臂913的端部的折叠部912。压电元件1011设置在第一臂911上,压电元件1013设置在第二臂913上。
压电元件1011和压电元件1013的设置是不并排在与第一臂911和第二臂913的延伸方向为正交的方向上。
压电元件1010包含一组压电元件1011和压电元件1013。
弹性支撑单元920包括从连接部720延伸到右下对角线的第一臂921、从第一臂921折叠的折叠部922、以及从折叠部922延伸到左上对角线并连接到连接端820的第二臂923。换句话说,弹性支撑单元920形成为曲折构造。
压电元件1021设置在第一臂921的左半部分上,并且是当驱动电压施加到压电元件1021时弹性变形的移位部921A。
压电元件1021不设置在第一臂921的右半部分上,并且是当驱动电压施加到压电元件1021时不弹性变形的移位限定部921B。
第二臂923具备压电元件1023,是当驱动电压施加到压电元件1023时弹性变形的移位部923A。
如上所述,弹性支撑单元920包括彼此相邻延伸的第一臂921和第二臂923,以及在延伸方向上连接第一臂921和第二臂923的相同侧的端部的折叠部922。压电元件1021设置在第一臂921上,压电元件1023设置在第二臂923上。
压电元件1021和压电元件1023的设置是不并排在与第一臂921和第二臂923的延伸方向为正交的方向上。
压电元件1020包含一组压电元件1021和压电元件1023。
弹性支撑单元930包括从连接部730向左延伸的第一臂931、从第一臂931向下折叠的折叠部932、以及从折叠部932向右延伸到连接端830的第二臂933。换句话说,弹性支撑单元930形成为曲折构造。
压电元件1031设置在第二臂931的右半部分上,并且是当驱动电压施加到压电元件1031时弹性变形的移位部931A。
压电元件1031不设置在第一臂931的左半部分上,并且是当驱动电压施加到压电元件1031时不弹性变形的移位限定部931B。
第二臂933具备压电元件1033,是当驱动电压施加到压电元件1033时弹性变形的移位部923A。
如上所述,弹性支撑单元930包括彼此相邻延伸的第一臂931和第二臂933,以及在延伸方向上连接第一臂931和第二臂933的相同侧的端部的折叠部932。压电元件1031设置在第一臂931上,压电元件1033设置在第二臂933上。
压电元件1031和压电元件1033的设置是不并排在与第一臂931和第二臂933的延伸方向为正交的方向上。
压电元件1030包含一组压电元件1031和压电元件1033。
如图17所示,固定支撑单元700包括支撑层730、氧化绝缘层740、硅有源层750和绝缘层760,它们在Z方向上从下层侧到上层侧以此顺序层叠。
移位限定部921B和移位限定部931B包括在Z方向上从下层侧到上层侧依次层叠的硅有源层750和绝缘层760。移位限定部912B和移位限定部931B的层叠构造与固定支撑单元700部分地共通。
移位部923A(包括压电元件1023)和移位部933A(包括压电元件1033)包括在硅有源层750的上表面上形成压电元件1000的致动器。
压电元件1000包括在Z方向上从下层侧到上层侧以此顺序层叠的下电极1000A、压电材料1000B和上电极1000C。
通过对下电极1000A和上电极1000C施加驱动电压,移位部923A和移位部933A弹性变形。
绝缘层760和保护膜1100被设置在压电元件1000(上电极1000C)的上表面上。
在本实施例中,通过对压电元件1011、1013、1021、1023、1031和1033施加驱动电压以使弹性支撑单元910、920和930弹性变形,第一反射器400和第二反射器800(换句话说,半VCSEL元件100和第二反射器800)之间的距离被改变以改变由半VCSEL发射的光的振荡波长。
通过将曲折构造上的致动器(压电元件1011、1013、1021、1023、1031、1033)、移位限定部911B、931B、921B以及折叠部912、922、932的组合产生的移位经由连接端810、820、830,作为可移动反射器的第二反射器800在保持固定支撑单元700和第二反射器800之间的平行性的情况下,在Z方向上平移地移动。
Z方向上的这种平移是通过向致动器的下电极1000A和上电极1000C施加驱动电压产生电势差来执行的。
对压电元件施加驱动电压(例如,相同的电压)时,压电元件的体积会改变。
由于压电元件和臂是物理连接的,所以在臂的压电元件附近产生面内应力。
受到应力的臂弹性地变形来释放应力。
此时,对臂部的XY方向的尺寸比附加各向异性并缩短臂部的Z方向的厚度,在Z方向上使臂部翘曲是主要的,而压电元件也在维持规定的曲率半径的状态下在Z方向上翘曲。
由压电元件产生的臂的翘曲被传递到在没有压电元件的移位限定部。
由于移位限定部因重力而向Z方向翘曲,因此,相对于压电元件的翘曲,由于重力引起的翘曲足够小(相当于可忽略的小的弹性变形),因此能够忽略该翘曲。
图18所示是图16和图17的支撑构造中的第二反射器800的驱动状态的侧视图。
图18所示是作为示例的弹性支撑单元910的放大图,并且弹性支撑单元920、930具有类似的构成。
在图18中,弹性支撑单元910的折叠部912在Z方向上的移位Z1增加了由压电元件1011和1013产生的偏转,或者是减小了第一臂911的曲率半径。可延长第一臂911的移位限定部911B,或者实施两者。
第一臂911从自由状态以角度θ1向折叠部912倾斜,并且在折叠部912被折回之后,第二臂913从自由状态以角度θ2倾斜(角度θ1和角度θ2之间的差是第一臂911和第二臂913之间的倾斜角)。
当形成在第二臂913上的与第一臂911的压电元件具有相同尺寸的压电元件驱动时,第一臂911的倾斜被抵消。
因此,在设置在第二臂913的端部处的连接端810,作为可移动反射器的第二反射器800可以在Z方向上移动,且维持固定支撑单元700的XY平面与作为可移动反射器的第二反射器800之间的平行度。
形成在第一臂911和第二臂913上的压电元件在XY平面上的尺寸可以相同也可以不同。
当形成在第一臂921和第二臂923上的压电元件在XY平面上的尺寸不相同时,调节施加到各压电元件的电压,以使得在各压电元件中产生的翘曲相同。
对压电元件施加的驱动电压是直流电压,也可以是电压随时间变化的正弦波形、余弦波形、三角波形。
在电压的调制频率和可移动反射器元件的谐振频率彼此分离的条件下,如上所述地移位量相对于电压的线性得到维持。
压电元件通过施加电压来驱动,并在电压和所产生的应力之间存在线性。
由于所产生的应力和臂的变形量也具有线性,因此所施加的电压和移位量具有线性。
图19所示是本实施方式的可调谐激光器10的驱动电压与谐振腔长度的关系图。图20所示是传统的利用静电引力的MEMS可调谐激光器的驱动电压与谐振腔长度的关系图。
如图19所示,本实施方式所涉及的可调谐激光器10在驱动电压与谐振腔长度之间实现高线性。
如图20所示,在根据比较示例的使用静电引力的MEMS可调谐激光器中,MEMS一侧的反射器的位置与驱动电压的平方成比例,并且当两个反射器之间的间隔移位到初始间隔的1/3或更大时,膜彼此吸引(即,吸合效应)。这种吸合效应导致驱动电压和谐振腔长度之间的线性不足。
图21所示是向弹性支撑单元910至930的压电元件1010至1030提供独立的驱动信号(驱动电压)的构成的功能框图。
如图21所示,通过作为中央处理单元(CPU)的功能组件的驱动信号供给单元(驱动电压供给单元)1200对弹性支撑单元910的压电元件1010(压电元件1011、1013)、弹性支撑单元920的压电元件1020(压电元件1021、1023)和弹性支撑单元930的压电元件1030(压电元件1031、1033)施加独立的驱动信号(驱动电压信号),弹性支撑单元920、920和930独立地变形,并且改变第一反射器400和第二反射器800之间的平面平行度(即,半VCSEL元件100和第二反射器之间的平面平行度)。
驱动信号供给单元1200还可以向压电元件1011和1013供给驱动信号(驱动电压信号),该驱动信号独立于向弹性支撑单元910的压电元件1010供应的驱动信号(驱动电压信号)。
驱动信号供给单元1200还可以向压电元件1021和1023供给驱动信号(驱动电压信号),该驱动信号独立于向弹性支撑单元920的压电元件1020供应的驱动信号(驱动电压信号)。
驱动信号供给单元1200还可以向压电元件1031和1033供给驱动信号(驱动电压信号),该驱动信号独立于向弹性支撑单元930的压电元件1030供应的驱动信号(驱动电压信号)。
例如,当弹性支撑单元910、920、930的一部分比另一部分的弹性支撑单元更靠近或更远离第二反射器800(半VCSEL元件100)时,就使用弹性支撑单元的一部分。通过使提供给弹性支撑单元的压电元件的驱动信号(驱动电压信号)不同于提供给其他部分的压电元件的驱动信号(驱动电压信号),使得弹性支撑单元910、920、930的姿态(弹性)彼此不同。通过调整是否变形、弹性变形的程度和方向等,可以最佳地设定第一反射器400和第二反射器800(半VCSEL元件100和第二反射器800的平面平行度)的平面平行度。
驱动信号提供单元1200根据第一反射器400相对于第二反射器800的倾斜,通过分别向弹性支撑单元910、920、930的压电元件1010(压电元件1011和1013)、压电元件1020(压电元件1021和1023)和压电元件1030(压电元件1031和1033)提供独立的驱动信号(驱动电压信号),以使弹性支撑单元910、920、930弹性变形,能够提高第一反射器400和第二反射器800的平面平行度(半VCSEL元件100和第二反射器800的平面平行度)。
驱动信号提供单元1200根据来自半VCSEL元件(发光部)100的光强度,通过分别向弹性支撑单元910、920、930的压电元件1010(压电元件1011和1013)、压电元件1020(压电元件1021和1023)和压电元件1030(压电元件1031和1033)提供独立的驱动信号(驱动电压信号),以使弹性支撑单元910、920和930弹性变形,能够改进半VCSEL元件(发光部)100。
在检测由半VCSEL元件(发光部)100发射的光强度的方法中存在自由度。例如,可以使用检测第一反射器400和第二反射器800的反射率的外部检测设备(例如,光电二极管)。
可以在制造或安装可调谐激光器10时执行由驱动信号供给单元1200对第二反射器800的倾斜调整。
可替换地,在制造或安装之后,可以根据周围环境(例如,材料或温度)在启动时或以规定时间间隔通过驱动信号供给单元1200来调节第二反射器800的倾斜。
驱动信号提供单元1200既可以是可调谐激光器10的内部组件,也可以是外部组件,并且在具体的方式里存在自由度。驱动信号供给单元不限于图21的示例。
图22所示是将不同的电压施加到两个连接部以使反射器(例如,第二反射器800)倾斜θ的动作的一例。
如图22所示,当一个连接部在+Z方向上移位并且另一连接部在-Z方向上移位时,反射部(第二反射器800)相对于非驱动状态的倾斜会倾斜θ。
所生成的倾斜取决于连接部的移位量Δz和连接端之间的距离,其关系是θ=arcsine(2·Δz/l)。
图23所示是连接部的位移量与连接端之间的距离变化时获得的倾斜角度之间的关系图。
通过适当地设定连接部的移位量和连接端之间的距离,可以吸收在安装过程中实际产生的(第一反射器400和第二反射器800的)倾斜。
在对多个连接部施加不同的电压的同时进一步施加相同的偏移电压时,根据上述电压和移位量的线性可以在维持倾斜的情况下在Z方向上驱动该反射镜部。
因此,可以在维持对激光振荡的反射部的适当倾斜的情况下扫频波长。
图24A和图24B所示是本实施方式的可调谐激光器10的波长扫频的示例图。
可调谐激光器10的激光振荡波长由构成有源层105和谐振器构造的材料中的发射光谱(即波长分布)特性来规定。
谐振器构造的特点是第一反射器400和第二反射器800之间在Z方向上的距离G,以及第一反射器400和第二反射器800之间存在的材料的折射率和尺寸。
有源层105利用通过电极注入到半VCSEL元件100里的电流来发光,并且谐振光(即,振荡光)的波长随着第一反射器400和第二反射器800之间在Z方向上的距离G的变化而改变。
图24A所示是谐振光(即,振荡光)朝向Z方向的下方的状态的图,图24B所示是谐振光(即,振荡光)朝向Z方向的上方的状态的图。
由于可以通过改变作为可移动反射器元件的第二反射器800在Z方向上的位置来改变第一反射器400和第二反射器800之间在Z方向上的距离G,所以可以调制谐振光(即,振荡光)的波长。
特别地,在本实施方式中,通过利用弹性支撑单元900和压电元件1000来设计第二反射器800的支撑构造,可以高精度地控制第一反射器400和第二反射器800之间在Z方向上的距离G。
其结果是,改善了振荡波长相对于驱动电压的线性,并且获得了具有所期望振荡波长的光。
更进一步地,通过对弹性支撑单元910的压电元件1010(压电元件1011、1013)、弹性支撑单元920的压电元件1020(压电元件1021、1023)和弹性支撑单元930的压电元件1030(压电元件1031、1033)施加独立的驱动信号(驱动电压信号),弹性支撑单元920、920和930弹性地变形,并且能提高第一反射器400和第二反射器800的平面平行度(即,半VCSEL元件100和第二反射器的平面平行度)。
图25所示是半VCSEL元件100(第一反射器400)和第二反射器800之间的间隔的长度(即,距离)与振荡波长之间的关系的模拟结果图。
由半VCSEL元件100发射的振荡光被发射到具有较低反射率的第一反射器400或第二反射器800。
因此,通过调整第一反射器400和第二反射器800之间的反射率的大小,可以调整半VCSEL元件100的振荡光的发射方向。
例如,当第一反射器400的反射率低于第二反射器800的反射率时,振荡光在Z方向上向下发射(图24A)。当第一反射器400的反射率高于第二反射器800的反射率时,振荡光在Z方向上向上发射(图24B)。
包括包含多种金属的多层金属膜的结合层分别形成在半VCSEL元件100(第一反射器400)和第二反射器800上。
例如,通过原子扩散接合方法将接合层与各元件接合,在第一反射器400和第二反射器800之间可以获得空间。
半VCSEL元件100的有源层105设置在谐振器构造的中心,该中心是与电场的驻波中的波腹相对应的位置,从而获得高的受激发射概率。
图26所示是本公开的实施方式的第一变形例的可调谐激光器10的图。
如图25所示,一个第二反射器800设置有多个半VCSEL元件100。
具体来说,对于一个第二反射器800设置有在XY平面上在X方向上彼此相邻的三个半VCSEL元件100X、100Y、100Z。
该三个半VCSEL元件100X、100Y、100Z也可以共享半导体基板500和防反射膜600。
在图26的构成中,在反射部(例如,第二反射器800)倾斜的情况下将电流注入到三个半VCSEL元件100X、100Y、100Z中时,各元件的谐振腔长度倾斜,并且振荡波长被分散。
此外,通过控制反射部的倾斜量,可以控制波长分散的大小。
图27所示是本公开的实施方式的第二变形例的可调谐激光器10的图。
如图27所示,在作为可移动反射器的第二反射器800内部,追加了用于高速驱动的可移动反射器构造800X。
其间利用接合层300接合在一起的半VCSEL元件100(第一反射器400)与第二反射器800之间的间隔的长度因可调谐激光器10的使用环境(例如,温度)而改变。
该间隔的长度变化为几个μm。通过利用根据可调谐激光器10的使用环境(例如,温度)而准备(预设)的电压来静态地驱动曲折构造,可以固定振荡波长的中心。
更进一步地,在固定中心波长之后,根据调制信号将用于高速驱动的可移动反射器构造800X在Z方向上移位几十nm,以便在无论环境变化而保持中心波长的情况下,以某一波长的带宽来扫频振荡波长。
如上所述,通过提供处理相对大的驱动范围的第二反射器800和处理相对小的驱动范围的可移动反射器构造800X(即,通过使用两个范围),可以以更高的精度来控制半VCSEL元件100(第一反射器400)和第二反射器800之间的间隔。
该构成可以进一步提高振荡波长和驱动电压的线性,并由此使光具有所需的振荡波长。
如图22所示,如果在不校正倾斜的情况下在Z方向上驱动反射部(例如,第二反射器800),因为只有反射光的一部分射入有源层,谐振器中的光的损失就可能增加。这使得难以在具有小增益的波长区域中产生激光振荡,从而使波长扫频宽度变窄。为了解决这样的问题,校正反射部的倾斜使得光反射期间引起的光的损失最小化,从而增加波长扫频宽度和光强度两者。
图28A所示是倾斜没有校正的情况下被接合在一起的可移动反射器元件和半VCSEL元件的剖视图。可移动反射器元件和半VCSEL元件之间的平面平行度部分地由于将可移动反射器元件和半VCSEL元件接合在一起的接合层的厚度的不均匀而降低。因为在将可移动反射器元件和半VCSEL元件接合在一起之前接合层已经在厚度里具有不均匀,或者因为在接合动作期间施加到可移动反射器元件、半VCSEL元件和接合层的热或压力在平面内分布不均匀,所以在厚度里会出现这种不均匀。
图28B所示是接合在一起的设有第二反射器和用于高速驱动的可移动反射器构造的半VCSEL元件和可移动反射器元件的剖视图。如图28A所示,使用独立的驱动信号驱动支撑第二反射器的弹性支撑单元和弹性支撑单元上的压电元件会改善已经劣化的平面平行度。在维持该电压的情况下,使用调制信号以连续的方式来时间驱动用于高速驱动的可移动反射器构造。这减少或消除了光反射期间的光的损失,并且还实现了高速波长扫频。
图29A所示是第二反射器的倾斜调整的图。相对于未被驱动的第二反射器(即,非驱动时第二反射器)的法线,根据某一电压信号来驱动与第二反射器连接的弹性体上的压电元件。在这种情况下,在非驱动时第二反射器的法线和被驱动的驱动时第二反射器的法线之间产生倾角α。此外,从第二反射器的表面开始并沿着非驱动时第二反射器的法线方向的直线上的点P根据施加到压电元件的驱动电压而改变其位置。例如,利用独立的电压信号来驱动多个压电元件,并通过改变信号的相对值或绝对值之间的差来控制点P的倾斜α和位置。
图29B所示是压电元件与施加于压电元件的电压信号之间的关系图。在该示例中,根据彼此独立的信号A、B和C来驱动三个压电元件。三个电压值随相位以正弦方式来变化。例如,电压信号A、B和C由以下等式给出,其中phase_ini_A、phase_ini_B和phase_ini_C分别是信号A、B和C的初始相位,并且Amp表示振幅:
Voltage_A=Amp*sin(phase+phase_ini_A)
Voltage_B=Amp*sin(phase+phase_ini_B)
Voltage_C=Amp*sin(phase+phase_ini_C)
通过使用上述等式给出某一相位,就可以获得所有信号的电压值。由于要施加到压电元件的电压值与弹性体的移位成比例,所以通过设置某一相位,弹性体的移位可以彼此不相等。因此,能够控制如图29A所示的点P的倾斜α和位置,并因此能够以更高的精度来调节第二反射器的倾斜。
图30所示是一个实施方式所涉及的可移动反射器元件和半VCSEL元件之间的平面平行度的校准的构成的框图。图31所示是一个实施方式所涉及的校准期间驱动信号源的相位与可调谐激光器的光功率之间的关系图。
驱动信号源包括用于驱动构成可调谐激光器的可移动反射器元件中的压电元件的电压信号源,以及用于将电流注入半VCSEL元件的电流信号源。在将某一电流注入半VCSEL元件的同时在电压信号源中扫频电压信号源中的上述相位时,第二反射器的倾斜会变化。在某一倾斜中,可移动反射器元件和半VCSEL元件之间的表面变得无限接近平行,并减少了光反射期间的光的损失。光的损失小时,从可调谐激光器发射的自然发射光或振荡光的强度就增加。因此,在驱动信号源的某一相位中光输出强度会最大。
此外,光电转换器根据入射光的强度来产生电压。使用驱动源的相位值和电压值或光电转换器的转换常数(即,单位光输出值产生的电压)来绘制相位值和光输出强度之间的关系。然后,通过获得电压值或光学输出值为最大的相位值来确定用于高平面平行度的相位条件。此外,通过不仅采用光学输出值而且采用用作可调谐激光器的性能指标的振荡阈值电流或斜率效率值,来实现能够优化各性能的校准。此外,这样的校准不仅在使用可调谐激光器的设备启动时执行,而且在诸如温度、湿度和大气压力之类的外部因素显著改变时也执行,从而在维持其性能的情况下驱动该设备。
例如,在光源附近设置温度测量设备,来测量振荡期间的可调谐激光器或其附近的温度。图30中的存储单元存储可调谐激光器在振荡期间的波长、输出功率和温度之间的关系作为相关公式或表,并且还存储压电元件的驱动电压和振荡波长之间的关系。处理器基于所测量到并存储在存储单元中的温度和波长之间的关系来确定振荡波长对于温度为恒定,或者输出功率变为最大的校正电压。根据该电压,驱动信号源驱动压电元件。
如上所述,本实施方式的光学设备包括第一反射器、第二反射器、支撑第二反射器的至少三个弹性支撑单元、以及分别设置在至少三个弹性支撑单元里的压电元件。
然后,通过向至少三个弹性支撑单元的压电元件提供独立的驱动信号并使至少三个弹性支撑单元独立地弹性变形,来改变第一和第二反射器的平面平行度(或者,发光部和第二反射器之间的平面平行度)。
通过控制独立地使用压电驱动的控制部,并通过设有至少三个或更多个驱动部的连接部来支撑支撑单元和反射镜,可以自由地控制发光部(例如,半VCSEL元件)和反射镜的倾斜。
这提高了两个反射部(第一和第二反射器)的平面平行度或者发光部(例如,半VCSEL元件)和反射部(第二反射器)的平面平行度。
其结果是,发光部的阈值电流减小,并且发光强度增大。
本公开不限于上述实施方式,并且可以以各种方式修改。
附图所示各部的尺寸、形状、功能等不限于上述实施方式,可以在本发明的效果的范围内适当地改变。
此外,在附图所示各部的尺寸、形状、功能等可以被适当地修改和实施,只要在附图所示各部的尺寸、形状、功能等不偏离本发明的目的即可。
在上述实施方式中,作为示例记述了用于支撑第二反射器的三个弹性支撑单元在第二反射器周围彼此分离地设置的情况。但在彼此分开设置的弹性支撑单元的数量上存在自由度,并且各种设计改变是可能的。
例如,在第二反射器周围可以设置支撑第二反射器的四个、五个、六个或更多个弹性支撑单元(可以设置至少三个)。
在上述实施方式中,包括至少三个弹性支撑单元,各支撑单元具有曲折构造,该曲折构造包括彼此相邻延伸的两个臂以及在延伸方向上连接两个臂的相同侧的端部的一个折叠部,并且压电元件形成在两个臂上。
在上述实施方式中,包括至少三个弹性支撑单元,各支撑单元具有曲折构造,该曲折构造可以包括彼此相邻延伸的三个或更多个臂以及两个或更多个折叠部,每个折叠部将三个或更多个臂中的两个相邻臂的相同侧上的端部在延伸方向上连接,并且压电元件可以形成在三个或更多个臂上。
换句话说,至少三个弹性支撑单元的每一个具有彼此相邻延伸的多个臂以及一个或多个折叠部,各折叠部在延伸方向上连接多个臂中的两个相邻臂的相同侧上的端部,并且压电元件分别形成在至少三个弹性支撑单元上。
在上述实施方式中,压电元件的设置是不并排在与至少三个弹性支撑单元的多个臂的延伸方向为正交的方向上。
压电元件的设置可以是并排在与至少三个弹性支撑单元的多个臂的延伸方向为正交的方向上。
在上述实施方式中,至少三个弹性支撑单元的多个臂包括驱动电压施加到压电元件时不弹性变形的移位限定部,其中多个移位限定部不包括多个臂中的压电元件。
具有压电元件的移位限定部可以是多个臂中未施加驱动电压的部分。
本发明可以以任何方便的形式来实现,例如使用专用硬件或专用硬件和软件的混合。本发明可以由通过一个或多个联网处理装置执行的计算机软件来实现。处理装置包括任何适于编程的装置,例如通用计算机、个人数字助理、无线应用协议(WAP)或第三代(3G)兼容移动电话等。由于本发明可以由软件来实现,因此本发明的各方面都包括可在可编程设备上实现的计算机软件。使用任何常规的载体介质(载体装置)能够将计算机软件提供给可编程设备。载体介质包括瞬态载体介质,诸如携带计算机代码的电、光、微波、声或射频信号。这种瞬态介质的示例是在诸如因特网之类的IP网络上携带计算机代码的传输控制协议/互联网络协议(TCP/IP)信号。载体介质还包括用于存储处理器可读代码的存储介质,诸如软盘、硬盘、紧凑型光盘只读存储器(CD-ROM)、磁带设备或固态存储器设备。
所述实施例的功能中的每一个可以由一个或一个以上处理电路或电路来实施。处理电路包括编程的处理器,处理器包括电路系统。处理电路还包括诸如专用集成电路(ASIC)、数字信号处理器(DSP)、现场可编程门阵列(FPGA)和被配置为执行所列举的功能的常规电路组件的设备。本专利申请基于并要求于2020年5月29日在日本专利局提交的日本专利申请No.2020-093946、2020年5月29日在日本专利局提交的日本专利申请No.2020-093949、2021年5月10日在日本专利局提交的日本专利申请No.2021-079475和2021年5月10日在日本专利局提交的日本专利申请No.2021-079476的优先权,其全部公开内容通过引用作为参考。
附图标记列表
10可调谐激光器(光学设备)
100半VCSEL元件(发光部,第一基板)
200可移动反射器元件(第二基板)
400第一反射器(第一反射镜)
800第二反射器(第二反射镜)
900、910、920、930弹性支撑单元
911、921、932第一臂
911B、921B、931B移位限定部
913、923、933第二臂
913B、923B、933B、943B移位限定部
912、922、932、942折叠部
1000、1010、1011、1013、1020、1021、1023、1030、1011X、1013X、1021X、1023X、1031、1033、1041、1043压电元件
1200驱动信号供给单元(驱动电压供给单元)
权利要求书(按照条约第19条的修改)
1.一种光学设备,包括:
具有第一反射部和有源层的发光部;
跨越所述有源层与所述第一反射部对置的第二反射部;
弹性支撑单元,其支撑所述第二反射部;
在所述弹性支撑单元上的压电元件;以及
电路,被配置为输出用于向所述压电元件施加驱动电压以使所述弹性支撑单元弹性变形的信号,
其中,所述弹性支撑单元的所述变形使所述第二反射部相对于所述第一反射部移动以振荡来自发光部的光。
2.根据权利要求1所述的光学设备,其中:
所述弹性支撑单元的所述变形改变所述第一反射部和所述第二反射部之间的距离,来改变从所述发光部发射的光的振荡波长。
3.根据权利要求1或2所述的光学设备,其中:
所述第一反射部和所述有源层形成第一基板,以及,
所述第二反射部、所述弹性支撑单元和所述压电元件形成第二基板。
4.根据权利要求3所述的光学设备:
其中,所述第二基板包括多个发光部。
5.根据权利要求1至4中任一项所述的光学设备:
其中,所述弹性支撑单元包括:
彼此相邻延伸的多个臂部,以及,
一个或多个折叠部,各折叠部在所述臂部的延伸方向上连接所述臂部的两个相邻臂部的同一侧上的端部,
其中,所述压电元件包括多个压电元件,所述压电元件分别在所述臂部上。
6.根据权利要求5所述的光学设备:
其中,所述压电元件沿着与所述臂部的所述延伸方向正交的方向并排。
7.根据权利要求5所述的光学设备:
其中,所述压电元件在所述臂的所述延伸方向上彼此移位。
8.根据权利要求5至7中任一项所述的光学设备:
其中,所述臂部包括移位限定部,并且所述移位限定部响应于对所述压电元件的驱动电压的施加而不能弹性变形。
9.根据权利要求8所述的光学设备:
其中,所述移位限定部没有所述压电元件。
10.根据权利要求8所述的光学设备:
其中,所述移位限定部设有未施加驱动电压的所述压电元件。
11.根据权利要求1至10中任一项所述的光学设备:
其中,所述弹性支撑单元包括至少两个弹性支撑单元,并且所述至少两个弹性支撑单元在所述第二反射部周围彼此分开。
12.根据权利要求1所述的光学设备:
其中,所述弹性支撑单元包括分别具有所述压电元件的至少三个弹性支撑单元,以及
其中,电路还被配置为将彼此独立的驱动信号分别输出到所述至少三个弹性支撑单元的所述压电元件,以使所述至少三个弹性支撑单元彼此独立地弹性变形,
并且其中,所述至少三个弹性支撑单元的所述变形改变所述第一反射部和所述第二反射部之间的平面平行度。
13.根据权利要求12所述的光学设备:
其中,所述电路被配置为基于所述第二反射部相对于所述第一反射部的倾斜,将彼此独立的所述驱动信号分别输出到所述至少三个弹性支撑单元的所述压电元件,以使所述至少三个弹性支撑单元彼此独立地弹性变形,
其中,所述至少三个弹性支撑单元的所述变形增加所述第一反射部和所述第二反射部之间的平面平行度。
14.根据权利要求12或13所述的光学设备,还包括被配置为发射光的发光部,其中:
基于从所述发光部发射的光的强度,所述电路被配置为将彼此独立的所述驱动信号分别输出到所述至少三个弹性支撑单元的所述压电元件,以使所述至少三个弹性支撑单元彼此独立地弹性变形,以及
所述至少三个弹性支撑单元的所述变形增加从所述发光部发射的所述光的强度。
15.根据权利要求14所述的光学设备,其中:
所述第一反射部和所述有源层形成第一基板,以及
所述第二反射部、所述至少三个弹性支撑单元和所述压电元件形成第二基板。
16.根据权利要求12至15中任一项所述的光学设备:
其中,所述至少三个弹性支撑单元中的每一个包括彼此相邻延伸的多个臂部,以及
一个或多个折叠部,各折叠部在所述臂部的延伸方向上连接所述臂部的两个相邻臂部的同一侧上的端部,
其中,所述压电元件包括多个压电元件,并且所述压电元件位于所述至少三个弹性支撑单元的所述臂部上。
17.根据权利要求16所述的光学设备:
其中,所述压电元件不沿着与所述至少三个弹性支撑单元的所述臂部的所述延伸方向正交的方向并排。
18.根据权利要求16或17所述的光学设备:
其中,所述臂部包括移位限定部,并且所述移位限定部响应于对所述压电元件的驱动电压的施加而不能弹性变形。
19.根据权利要求18所述的光学设备:
其中,所述移位限定部分别没有所述压电元件。
20.根据权利要求12至19中任一项所述的光学设备:
其中,所述至少三个弹性支撑单元在所述第二反射部周围彼此分开。
- 光学设备、激光系统以及光学设备的制造方法
- 光学设备用遮光膜及光学设备用层叠遮光膜、使用了它们的光学设备用遮光环、光学设备用光圈构件、光学设备用快门构件、透镜单元以及相机模块
- 光学设备控制装置、光学设备控制方法和光学设备控制程序