基于多任务控制应急搜救无人船
文献发布时间:2023-06-19 19:35:22
技术领域
本发明属于应急搜救无人船技术领域,涉及基于多任务控制应急搜救无人船。
背景技术
现有技术中,无人船在进行相关工作时,其容易出现风浪造成的难以控制的问题,导致应急搜救船在工作中,出现问题,无法及时快速的进行准确的控制。
发明内容
本发明目的在于提供基于多任务控制应急搜救无人船,以解决现有技术中无人船不易控制的技术问题。
为实现上述目的,本发明通过以下技术方案予以实现。
基于多任务控制应急搜救无人船,包括,
无人机船身,所述无人机船身两侧连接有舱体;
起落组件,所述起落组件通过卷轴与无人机船身内的船舱连接,且所述卷轴作业,带动起落组件上升或下降;
水质监测组件,所述水质监测组件搭载于所述无人机船身和/或舱体上,用于无人机船身下方水体的水质监测;
位于所述无人机船身和/或舱体上的陀螺仪以及地磁传感器,所述陀螺仪和地磁传感器用于获取无人机船身和/或舱体的姿态;
控制组件,所述控制组件发出控制指令形成期待数值,并将获取的无人机船身和/或舱体的姿态反馈至控制组件,使其与期待数值进行对比,获得对于推进器的目标速度和/或角度。
作为本发明的进一步改进,所述起落组件包括拖载平台,所述拖载平台通过绞盘组件,与所述船舱内的卷轴连接,所述拖载平台与船舱之间形成装配空间。
作为本发明的进一步改进,所述无人机船身包括船壳,所述船壳上设有控制舱以及位于拖载平台上方的暂存舱,所述控制舱与暂存舱之间设有电源舱,所述绞盘组件以及带动绞盘组件工作的动力组件位于所述控制舱内。
作为本发明的进一步改进,所述绞盘组件包括绞盘以及缠绕于绞盘上的线缆组件,所述绞盘外侧设置有带有状态指示灯的防护罩,所述防护罩朝下暂存舱处形成缺口,所述缺口处装配有探照灯以及带有摄像头的摄像云台。
作为本发明的进一步改进,还包括位于船舱与拖载平台之间的滑轮组件,所述滑轮组件用于调整拖载平台和船舱之间的距离。
作为本发明的进一步改进,还包括位于拖载平台上的转向推进器和前进推进器,用于带动拖载平台在船舱下方的转向运动或前进运动。
作为本发明的进一步改进,所述控制组件连接有遥控器,所述遥控器用于控制所述推进器输出,所述获取的无人机船身和/或舱体的姿态反馈至所述推进器输出处。
作为本发明的进一步改进,所述控制组件还包括对比计算单元,所述对比计算单元用于推进器输出的方向信息与姿态中的现有的方向信息的对比计算。
作为本发明的进一步改进,所述对比计算单元、推进器输出以及无人机船身和/或舱体的姿态于控制组件内形成闭环的工作方式。
作为本发明的进一步改进,所述水质监测组件包括温度监测组件、导电率监测仪、PH值检测组件、浊度监测组件、COD监测组件或重金属监测组件中的一种。
本发明的有益效果如下:
首先,本发明中,能够同时实现水质监测以及应急搜救等效果,尤其是在应急搜救时,利用起落组件,能够将搜救的设备等置于起落组件中,进行救援,同时,还可以在起落组件上增加放水下无人设备或无人机,以实现水下无人设备的升降以及无人机的停放等,实现了多种任务的效果。
其次,本发明中,通过将目前姿态以及控制组件进行对比,进而能够使得无人船的推进器控制更加人性化,减少了在突发的风浪造成的难以控制的影响,提高控制的精准性。
最后,本发明中,船体外形设计采用“本体+舱体”的多体式模块化组装结构形式。采用这种多体式船体结构也大大的增强了船体的稳定性。达到了“便携、可拆分、易收纳”的目的。
附图说明
图1为本发明中基于多任务控制应急搜救无人船的结构示意图;
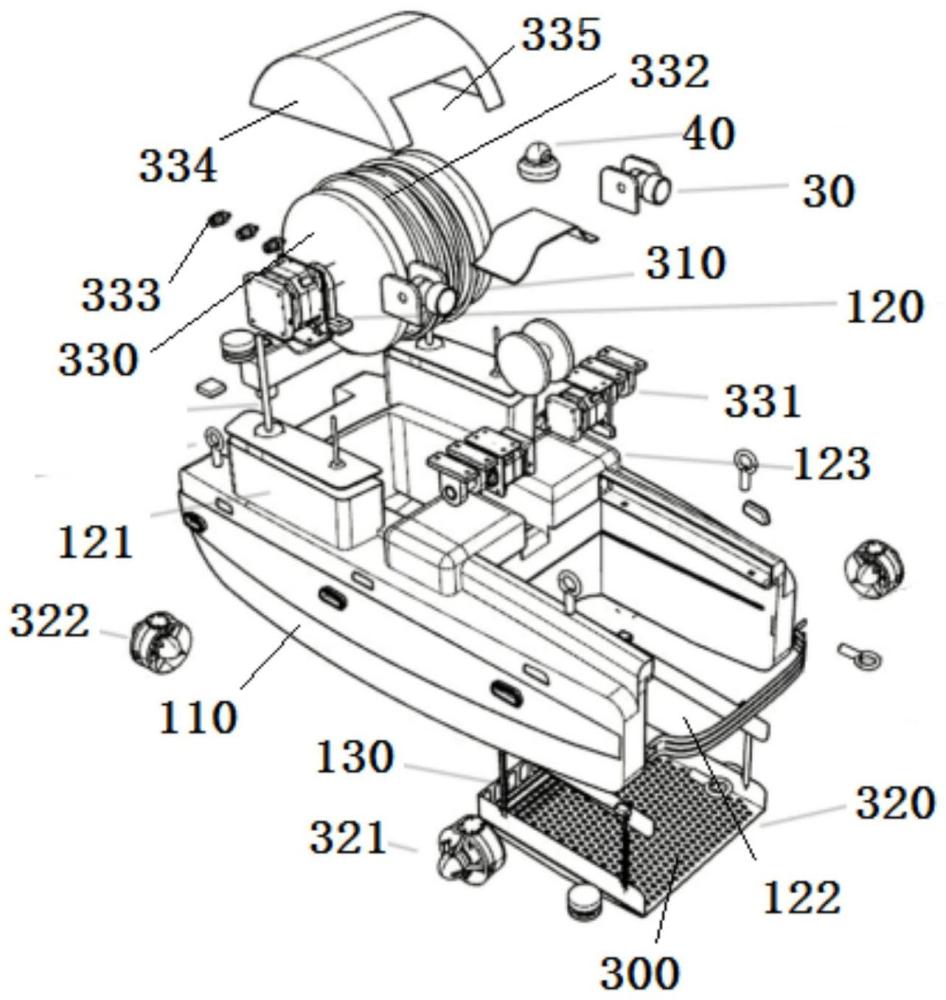
图2为本发明中无人机船身与起落组件的组装图;
图3为本发明中基于多任务控制应急搜救无人船的电路原理图;
附图标记:
100、无人机船身;110、船舱;120、船壳;121、控制舱;122、暂存舱;123、电源舱;130、滑轮组件;200、舱体;300、起落组件;310、卷轴;320、拖载平台;321、转向推进器;322、前进推进器;330、绞盘组件;331、绞盘;332、线缆组件;333、状态指示灯;334、防护罩;335、缺口;400、水质监测组件;500、控制组件;510、对比计算单元;600、遥控器;700、推进器;10、陀螺仪;20、地磁传感器;30、探照灯;40、摄像云台。
具体实施方式
下面结合附图和具体实施方式对本发明进行详细说明。
参照附图1-3所示,本发明中,基于多任务控制应急搜救无人船,包括,
无人机船身100,所述无人机船身100两侧连接有舱体200;
起落组件300,所述起落组件300通过卷轴310与无人机船身100内的船舱110连接,且所述卷轴310作业,带动起落组件300上升或下降;
水质监测组件400,所述水质监测组件400搭载于所述无人机船身100和/或舱体200上,用于无人机船身100下方水体的水质监测;
位于所述无人机船身100和/或舱体200上的陀螺仪10以及地磁传感器20,所述陀螺仪10和地磁传感器20用于获取无人机船身100和/或舱体200的姿态;
控制组件500,所述控制组件500发出控制指令形成期待数值,并将获取的无人机船身100和/或舱体200的姿态反馈至控制组件500,使其与期待数值进行对比,获得对于推进器700的目标速度和/或角度。
本发明中,能够同时实现水质监测以及应急搜救等效果,尤其是在应急搜救时,利用起落组件,能够将搜救的设备等置于起落组件中,进行救援,同时,还可以在起落组件上增加放水下无人设备或无人机,以实现水下无人设备的升降以及无人机的停放等,实现了多种任务的效果。
本发明中,通过将目前姿态以及控制组件进行对比,进而能够使得无人船的推进器控制更加人性化,减少了在突发的风浪造成的难以控制的影响,提高控制的精准性。
本发明中,船体外形设计采用“本体+舱体”的多体式模块化组装结构形式。采用这种多体式船体结构也大大的增强了船体的稳定性。达到了“便携、可拆分、易收纳”的目的。
参照附图2所示,为了承载设备或者进行其它组件的容纳,所述起落组件300包括拖载平台320,所述拖载平台320通过绞盘组件330,与所述船舱210内的卷轴310连接,所述拖载平台300与船舱110之间形成装配空间。本实施例中,具体地,拖载平台320为四面无遮挡,只有底面为栅格网状,通过四个顶点的钢丝连接到船舱内的一个卷轴,卷轴工作时,起落架即可平稳的上升或下降,可用作远程布放水下无人设备,也可用作无人机停放平台。
本实施例中,选用绞盘组件的升降,能够使得整个的无人机船身100以及起落组件300同时进行升降,实现了不同水深处的水质测量。
本发明中,为了合理利用无人机船身结构,所述无人机船身100包括船壳120,所述船壳120上设有控制舱121以及位于拖载平台320上方的暂存舱122,所述控制舱121与暂存舱122之间设有电源舱123,所述绞盘组件330以及带动绞盘组件330工作的动力组件340位于所述控制舱121内。本实施例中,将船壳进行合理的划分,既保证了核心运动组件的装配和供电,又增加了暂存舱122,使用中,暂存舱可以存放一些其它用于无人船执行任务的组件,比如增加设备等。
为了实现合理的空间利用,所述绞盘组件330包括绞盘331以及缠绕于绞盘331上的线缆组件332,所述绞盘331外侧设置有带有状态指示灯333的防护罩334,所述防护罩334朝下暂存舱处形成缺口335,所述缺口335处装配有探照灯30以及带有摄像头的摄像云台40。本实施例中,防护罩334同时具备多重效果,具体地,首先,用于绞盘与外界的隔离防护,避免湖水等影响绞盘作业;其次,形成装配件,装配用于绞盘组件330的工作状态的状态指示333,进而使得外界能够及时观察到隐藏的绞盘和线缆组件的工作状态,能及时进行检修和维护;再次,形成的缺口,使得摄像云台40和探照灯局部被包覆装配,既不影响其工作,又实现了对其的保护。
为了单独控制拖载平台320的升降,还包括位于船舱110与拖载平台320之间的滑轮组件130,所述滑轮组件130用于调整拖载平台320和船舱110之间的距离。本实施例中,在实现水下无人设备监测等作业时,无人机船身100位于水面可视范围内,而设备通过装配在拖载平台320上,利用控制拖载平台320的深度,确保了对于深水区域内的其他作业。在进行设置时,拖载平台四个角落处均设置滑轮组件130,且四个滑轮组件130通过不同的驱动组件,在同一时间,选用同一动力大小进行驱动,确保整个拖载平台320的平稳升降,实现稳定作业。
为了确保拖载平台320的多方向作业,还包括位于拖载平台320上的转向推进器321和前进推进器322,用于带动拖载平台320在船舱110下方的转向运动或前进运动。本实施例中,通过单独的推进器,在水下作业时,使得拖载平台320实现了转动以及前进的可能,进而将水质监测以及其他作业的范围进行了扩大,提高了作业效率。
为了更好的控制无人机船身100和/或舱体200,所述控制组件500连接有遥控器600,所述遥控器600用于控制所述推进器输出,所述获取的无人机船身100和/或舱体200的姿态反馈至所述推进器700输出处。
为了获得好的控制,所述控制组件500还包括对比计算单元510,所述对比计算单元510用于推进器700输出的方向信息与姿态中的现有的方向信息的对比计算。
具体地,所述对比计算单元510、推进器700输出以及无人机船身100和/或舱体200的姿态于控制组件内形成闭环的工作方式。
本实施例中,无人船通过搭载的陀螺仪,地磁传感器,采集无人船的姿态,经过运算处理后可以得出无人船的倾斜角度和朝向。
遥控器发过来的控制指令作为期望数值,比如摇杆向右拨动一点,希望无人船右转20度,无人船可以在控制推进器的同时比对自己的朝向,以闭环的方式控制推进器的动力输出,从而避免风浪造成的难以控制的影响。本实施例中,救援船通过算法补偿优化,比如在控制流程和算法流程上优化,使得操作更加人性化。
进一步地,本发明中,所述水质监测组件400包括温度监测组件、导电率监测仪、PH值检测组件、浊度监测组件、COD监测组件或重金属监测组件中的一种。
本发明在使用时,搭载有卫星定位系统;能接受遥控器的手动遥控指令;具有状态指示功能,异常时能采取声光等方式报警;具有对数据进行实时传输和本地备份的功能;异常情况下,船体可自动返航(遥控器断电、通讯信号中断、低电量报警等情况);低电量报警值,能够在软件中手工设置及更改;无人船端具备原始数据直接实时回传控制终端的功能;
无人船上搭载水下专用水质传感器,通过操控无人船移动即可测量出大量的水质数据,包括但不限于温度、导电率、溶解氧、酸碱度、浊度、蓝绿藻、BOD,COD,重金属等,相对于传统的固定点监测或水面监测,更加全面,更加高效。
本发明中,通过计算机对水质数据与位置信息进行整合汇集,能够得出一个完整的立体化的水域水质地图,通过对多个水域水质地图进行分析,能够精确的计算出主要污染区域,污染物走向,污染物来源。针对暗管排污等场景的检测提供了精准高效的解决方案。
在进行水质监测作业时,本发明结合物联网技术、嵌入式技术和传感器技术并借助北斗/GPS双模定位等方法,可快速精确的定位无人船位置,实时追踪定位。以水体采样和水质监测为途径,通过数据分析,实现水质实时监视和监测、图像采集和监测、药物投入、污水处理、远程监视和操作等多功能于一体的无人船设备。
参照附图1所示,本实施例中,无人机船身100通过活动连接件与舱体200连接,进而在活动连接件展开或者收缩时,实现舱体200与无人机船身100的远离或靠近,实际使用中,左右两个舱体200可以单独作为一个小船行驶,也可多个舱体拼接为一艘合体船,双舱体组合,可组合为不同形式的船(单体船、双体船等)。具体地,在无人机船身100与舱体200之间的连接件采用可调节高度与宽度的活动连接件,可以根据不同风浪等级对应的调节本体与舱体之间的间距,以达到缓冲风浪的作用。
可以理解,本发明是通过一些实施例进行描述的,本领域技术人员知悉的,在不脱离本发明的精神和范围的情况下,可以对这些特征和实施例进行各种改变或等效替换。另外,在本发明的教导下,可以对这些特征和实施例进行修改以适应具体的情况及材料而不会脱离本发明的精神和范围。因此,本发明不受此处所公开的具体实施例的限制,所有落入本申请的权利要求范围内的实施例都属于本发明所保护的范围内。
- 一种基于岛礁-无人船平台的海上应急突发搜救处置方法
- 一种基于无人机的海上搜救系统及其搜救方法和控制方法