一种巡检消防机器人
文献发布时间:2023-06-23 06:30:03
技术领域
本发明涉及机器人领域,具体涉及一种巡检消防机器人。
背景技术
每一次火灾财产、人员损伤都是巨大的,把火情扼杀在摇篮里,对火情及时发现及时消灭。
于此同时,机器人也是作为新型科技实物在慢慢兴起,可以实现自主避障与导航,智能语音交互问答,但目前的机器人仍为本地运算及存储,本地导航避障,与人的交互智能化能力低,科技能力不足,使得机器人的推广与应用受到很大阻力。
发明内容
本发明为了克服以上技术的不足,提供了一种满足无火灾时日常巡检,有火灾时及时灭火的巡检消防机器人。
本发明克服其技术问题所采用的技术方案是:
一种巡检消防机器人,包括:
车体,其下端四个边角处分别转动安装有车轮;
水箱,设置于车体中;
筒体,竖直安装于车体上,筒体上沿圆周方向间隔设置有4个滑槽;4个喷头,分别通过滑动机构沿竖直方向滑动安装于对应的滑槽中;
驱动机构,设置于车体上,用于同步驱动4个喷头沿滑槽上下滑动;
水箱,设置于车体中,各个喷头通过供水装置与水箱相连接。
进一步的,上述滑动机构包括滑动插装于滑槽中的滑块,所述滑块的外侧端沿水平方向安装有连杆,喷头固定于连杆的外侧端。
进一步的,上述驱动机构包括设置于筒体中的转轴以及安装于车体中的电机,所述转轴的轴线沿竖直方向设置,转轴的上端通过轴承Ⅰ转动安装于筒体的上端,转轴的下端通轴承Ⅱ转动安装于车体上,转轴与电机的输出轴同轴传动连接,转轴的中间部位设置有丝杠,螺母旋合于丝杠上,各个滑块的内侧端固定于螺母上。进一步的,上述供水装置包括安装于车体上的泵,泵的进水口与水箱相连,所述滑块中沿水平方向设置有水道Ⅰ,所述连杆中设置有水道Ⅱ,滑块下端安装有管接头,管接头一端与水道Ⅰ的内侧端相连接,其另一端通过橡胶软管与泵的出水口相连接,水道Ⅰ的外侧端与水道Ⅱ的内侧端相连接,水道Ⅱ的外侧端与喷头相连接。
优选的,还包括设置于筒体上端的云台。
本发明的有益效果是:车体通过车辆移动,进行巡检工作,当出现火灾时,供水装置将水箱中的水输送至喷头中,由喷头完成喷洒,实现灭火,驱动机构驱动4个喷头沿滑槽上下移动,实现高度位置的调整,适应不同高度的灭火需求,由于在圆周方向上设置有4个喷头,因此可以满足多角度灭火。
附图说明
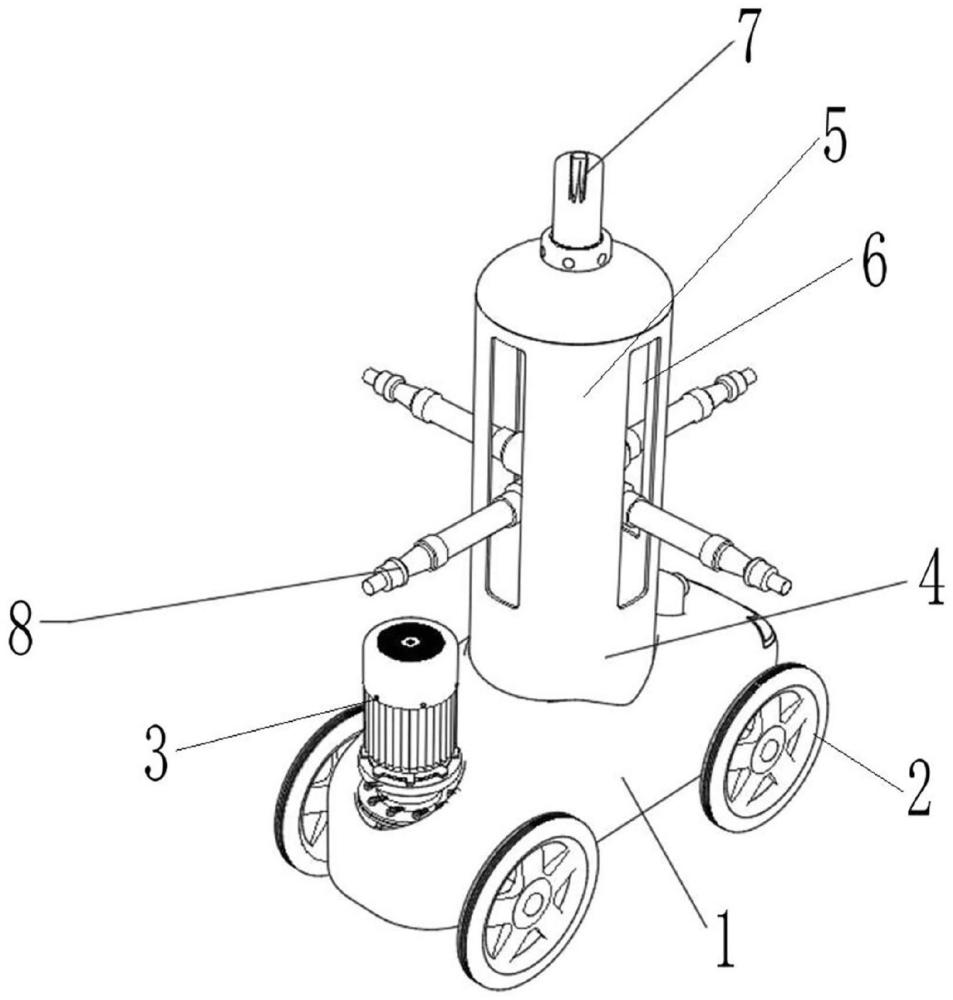
图1为本发明的立体结构示意图;
图2为本发明的主视剖面结构示意图;
图中,1.车体2.车轮3.泵4.筒体5.滑槽6.云台7.喷头8.轴承Ⅰ9.轴承Ⅱ10.转轴11.丝杠12.电机13.水箱14.滑块15.水道Ⅰ16.连杆17.水道Ⅱ18.管接头19.橡胶软管20.螺母。
具体实施方式
下面结合附图1、附图2对本发明做进一步说明。
一种巡检消防机器人,包括:车体1,其下端四个边角处分别转动安装有车轮2;水箱13,设置于车体1中;筒体4,竖直安装于车体1上,筒体4上沿圆周方向间隔设置有4个滑槽5;4个喷头7,分别通过滑动机构沿竖直方向滑动安装于对应的滑槽5中;驱动机构,设置于车体1上,用于同步驱动4个喷头7沿滑槽5上下滑动;水箱13,设置于车体1中,各个喷头7通过供水装置与水箱13相连接。车体1通过车辆2移动,进行巡检工作,当出现火灾时,供水装置将水箱13中的水输送至喷头7中,由喷头7完成喷洒,实现灭火,驱动机构驱动4个喷头7沿滑槽5上下移动,实现高度位置的调整,适应不同高度的灭火需求,由于在圆周方向上设置有4个喷头,因此可以满足多角度灭火。
可以通过总控台进行机器人自动或人为调度,平常无火灾时候,机器人可以进行日常巡检,可以进行整个小区的安防及消防巡检,确保小区、园区、商场、仓库等场所安全。
在本发明的一个实施例中,滑动机构包括滑动插装于滑槽5中的滑块14,滑块14的外侧端沿水平方向安装有连杆16,喷头7固定于连杆16的外侧端。喷头7上下移动时,利用滑块14在滑槽5中导向,结构简单,运行可靠。
在本发明的一个实施例中,驱动机构可以为如下结构,其包括设置于筒体4中的转轴10以及安装于车体1中的电机12,转轴10的轴线沿竖直方向设置,转轴10的上端通过轴承Ⅰ8转动安装于筒体4的上端,转轴10的下端通轴承Ⅱ9转动安装于车体1上,转轴10与电机12的输出轴同轴传动连接,转轴10的中间部位设置有丝杠11,螺母20旋合于丝杠11上,各个滑块14的内侧端固定于螺母20上。电机12转动驱动转轴10转动,从而驱动丝杠11转动,由于螺母20与丝杠11螺纹传动连接,从而使各个喷头7利用滑块14在滑槽5中的导向下上下移动。
在本发明的一个实施例中,供水装置包括安装于车体1上的泵3,泵3的进水口与水箱13相连,滑块14中沿水平方向设置有水道Ⅰ15,连杆16中设置有水道Ⅱ17,滑块14下端安装有管接头18,管接头18一端与水道Ⅰ15的内侧端相连接,其另一端通过橡胶软管19与泵3的出水口相连接,水道Ⅰ15的外侧端与水道Ⅱ17的内侧端相连接,水道Ⅱ17的外侧端与喷头7相连接。泵3工作后将水箱13中的水抽出后通过管接头18进入到水道Ⅰ15中,之后流入水道Ⅱ17内,最终经过喷头7喷出。
在本发明的一个实施例中,还包括设置于筒体4上端的云台6。云台6可以通过云台进行可视巡检。可以用于场所安防、消防巡检。
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种电站巡检机器人的红外快速巡检方法
- 一种应用于室内消防设备的巡检机器人及巡检系统
- 一种消防巡检机器人及消防系统