一种直流电机的电动真空阀的控制系统及方法
文献发布时间:2024-01-17 01:27:33
技术领域
本发明涉及电动真空阀控制技术领域,特别是指一种直流电机的电动真空阀的控制系统及方法。
背景技术
真空阀是真空系统中用于控制流体运行通断的关键器件,按照其控制方式划分通常分为电动真空阀和手动真空阀。在大型工厂中由于经常需要对真空阀进行批量控制,电动真空阀相较手动真空阀具备批量控制的优势被广泛使用;
电动真空阀又分为直流电机驱动和交流电机驱动两种驱动形式,其中直流电机驱动的电动真空阀具有结构简单、体积小、安全性高等优点应用场景更为广泛;
当前用于直流电机驱动的电动真空阀控制系统都是针对特定型号电动真空阀设计的,不具备通用性。
发明内容
本发明要解决的技术问题是提供一种直流电机的电动真空阀的控制系统及方法,以实现直流电机的电动真空阀打开与关闭的精准控制,提高直流电机运动效率。
为解决上述技术问题,本发明的技术方案如下:
一种直流电机的电动真空阀的控制系统,包括:
与直流电机电连接的电动真空阀;
连接于所述电动真空阀的供电线路上的至少一个正反转模块,用于接收控制器发送的控制信号,并根据所述控制信号控制直流电机正向运动并带动所述电动真空阀的运动机构向第一方向运动或者控制直流电机反向运动并带动所述电动真空阀的运动机构向第二方向运动;
与所述正反转模块通信连接的控制器,用于根据所述电动真空阀的运动机构向第一方向运动至完全打开状态的第一状态信号控制所述运动机构停止运动,或者根据所述电动真空阀的运动机构向第二方向运动至完全关闭状态的第二状态信号控制所述运动机构停止运动。
可选的,所述电动真空阀上设有开到位行程开关以及关到位行程开关;
所述开到位行程开关在监测到所述电动真空阀的运动机构向第一方向运动至完全打开状态时,产生第一状态信号;
所述关到位行程开关在监测到所述电动真空阀的运动机构向第二方向运动至完全关闭状态时,产生第二状态信号。
可选的,所述的直流电机的电动真空阀的控制系统,还包括:
与所述正反转模块正极供电端电连接的至少一个电流传感器,所述电流传感器还与所述控制器通信连接,用于监测所述电动真空阀的运动机构向第一方向运动或者向第二方向运动过程中产生的电流信号,在所述电流信号超过一预设电流阈值时,控制所述电动真空阀的运动机构停止运动。
可选的,所述的直流电机的电动真空阀的控制系统,还包括:供电装置;
所述供电装置包括:总断路器、控制断路器、主断路器、控制电源、主电源;
所述总断路器的输入端接入外电网220V工频交流电,输出端分别与所述控制断路器的输入端、所述主断路器的输入端电连接,用于控制控制系统的整体供电;
所述控制断路器的输出端与所述控制电源电连接,用于控制所述控制电源为所述控制器、所述电流传感器供电;
所述主断路器的输出端与所述主电源的一端电连接,用于控制所述主电源为所述正反转模块供电。
可选的,所述正反转模块通过数字量输出模块与所述控制器通信连接,所述正反转模块根据接收到的所述数字量输出模块传输的第一控制信号控制直流电机正向运动,根据接收到的所述数字量输出模块传输的第二控制信号控制直流电机反向运动。
可选的,所述正反转模块包括:
信号判断电路以及与所述信号判断电路电连接的直流电机控制电路,所述信号判断电路根据所述控制器输入的第一控制信号控制所述直流电机控制电路的电流输出方向为正向,或者,根据所述控制器输入的第二控制信号控制所述直流电机控制电路的电流输出方向为反向。
可选的,所述直流电机控制电路包括:
第一接触器;
与所述第一接触器并联的第二接触器;所述第一接触器与所述第二接触器的输入端分别与主电源的两端电连接;所述第一接触器与所述第二接触器的输出端分别与直流电机电连接。
可选的,所述信号判断电路包括:
第一接触开关,所述第一接触开关的第一端与主电源正极电连接;
第二接触开关,所述第二接触开关的第一端与所述第一接触开关的第二端电连接,所述第二接触开关的第二端通过第二接触器辅助常闭触点与第一继电器的第一端电连接;
第三接触开关,所述第三接触开关的第一端与所述第一接触开关的第二端电连接,所述第三接触开关的第二端与通过第一接触器辅助常闭触点与第二继电器的第一端电连接;
所述第一继电器的第二端电连接与第一继电器的第二端电连接;
第一接触器辅助常开触点,所述第一接触器辅助常开触点的两端分别与所述第二接触开关的两端电连接;
第二接触器辅助常开触点,所述第二接触器辅助常开触点的两端分别与第三接触开关的两端电连接。
可选的,所述开到位行程开关及关到位行程开关通过数字量输入模块与所述控制器通信连接;
所述开到位行程开关的输出端与所述数字量输入模块的DO0.0信号接口通信连接,所述关到位行程开关的输出端与所述数字量输入模块的信号接口通信连接。
本发明的实施例还提供一种直流电机的电动真空阀的控制方法,应用于如上述所述的直流电机的电动真空阀的控制系统,所述方法包括:
接收控制器发送的控制信号;
根据所述控制信号控制直流电机正向运动并带动所述电动真空阀的运动机构向第一方向运动或者控制直流电机反向运动并带动所述电动真空阀的运动机构向第二方向运动;
根据所述电动真空阀的运动机构向第一方向运动至完全打开状态的第一状态信号控制所述运动机构停止运动,或者根据所述电动真空阀的运动机构向第二方向运动至完全关闭状态的第二状态信号控制所述运动机构停止运动。
本发明的上述方案至少包括以下有益效果:
本发明的上述方案,通过连接于所述电动真空阀的供电线路上的至少一个正反转模块接收控制器发送的控制信号,并根据所述控制信号控制直流电机正向运动并带动所述电动真空阀的运动机构向第一方向运动或者控制直流电机反向运动并带动所述电动真空阀的运动机构向第二方向运动;与所述正反转模块通信连接的控制器根据所述电动真空阀的运动机构向第一方向运动至完全打开状态的第一状态信号控制所述运动机构停止运动,或者根据所述电动真空阀的运动机构向第二方向运动至完全关闭状态的第二状态信号控制所述运动机构停止运动,进而实现直流电机的电动真空阀打开与关闭的精准控制,提高直流电机运动效率。
附图说明
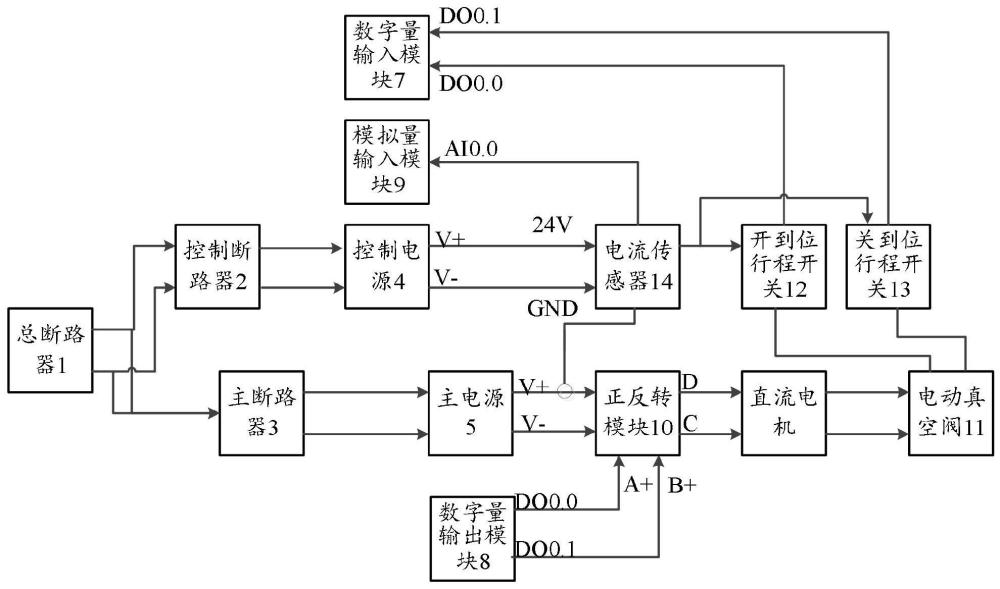
图1是本发明实施例提供的直流电机的电动真空阀控制系统的整体电路结构示意图;
图2是图1的一局部电路结构示意图;
图3是图1的另一局部电路结构示意图;
图4是本发明实施例提供的正反转模块内部电路结构示意图。
附图标号说明:1、总断路器;2、控制断路器;主断路器;4、控制电源;5、主电源;6、控制器;7、数字量输入模块;8、数字量输出模块;9、模拟量输入模块;10、正反转模块;11、电动真空阀;12、开到位行程开关;13、关到位行程开关;14、电流传感器;KM1、第一接触器;KM2、第二接触器;SB1、第一接触开关;SB2第二接触开关;SB3、第三接触开关;KM3、第一接触器辅助常闭触点;KM4、第二接触器辅助常闭触点;KM5、第一接触器辅助常开触点;KM6、第二接触器辅助常开触点;KM7、第一继电器;KM8、第二继电器。
具体实施方式
下面将参照附图更详细地描述本公开的示例性实施例。虽然附图中显示了本公开的示例性实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。
如图1至图3所示,本发明的实施例提出一种直流电机的电动真空阀的控制系统,包括:
与直流电机电连接的电动真空阀11;
连接于所述电动真空阀11的供电线路上的至少一个正反转模块10,用于接收控制器6发送的控制信号,并根据所述控制信号控制直流电机正向运动并带动所述电动真空阀11的运动机构向第一方向运动或者控制直流电机反向运动并带动所述电动真空阀11的运动机构向第二方向运动;
与所述正反转模块10通信连接的控制器6,用于根据所述电动真空阀11的运动机构向第一方向运动至完全打开状态的第一状态信号控制所述运动机构停止运动,或者根据所述电动真空阀11的运动机构向第二方向运动至完全关闭状态的第二状态信号控制所述运动机构停止运动。
该实施例中,所述电动真空阀11与所述直流电机电连接,同时也固定于所述直流电机上,在直流电机的转子运动时带动所述电动真空阀11上的运动机构运动;这里,所述的直流电机可以是24v直流驱动电机;
在本发明的一可实现方案中,可以通过触摸屏或上位机通过以太网通信向所述控制器6发出所述电动真空阀11的运动机构向第一方向运动或第二方向运动的指令,所述控制器6对指令进行处理后发出控制信号,并将所述控制信号传输至所述正反转模块10,以此控制所述正反转模块10的供电输出方向,在所述正反转模块10的供电输出方向改变的同时,输入直流电机中电流的方向也随之改变,进而改变直流电机的转子正向运动或反向运行,当直流电机的转子正向运动时,带动所述电动真空阀11的运动机构向第一方向运动,以实现电动真空阀11的打开;当直流电机的转子反向运动时,带动所述电动真空阀11的运动机构向第二方向运动,以实现电动真空阀11的关闭;
这里,所述电动真空阀11的运动机构可以是螺杆,所述电动真空阀11的运动机构向第一方向运动或向第二方向运动,即为螺杆的正向旋转与反向旋转;
所述控制器6输出的控制信号可以包括:控制直流电机正向运动的第一控制信号、控制直流电机反向运动的第二控制信号;
在所述电动真空阀11的运动机构向第一方向运动或第二方向运动时,会产生表示向第一方向运动至完全打开状态的第一状态信号,或表示向第二方向运动至完全关闭的第二状态信号,同时所述第一状态信号或第二状态信号会反馈至控制器6,所述控制器6对其进行处理后会发出停机指令,并通过所述正反转模块10断开所述直流电机的供电,进而控制所述运动机构停止运动,以避免损坏所述运动机构以及直流电机,同时实现电动真空阀11运动的精准控制,降低直流电机功耗;
优选的,所述第一状态信号或第二状态信号反馈至控制器6后,控制器6会通过以太网通信将所述第一状态信号或第二状态信号反馈至上位机或显示屏,以实时显示电动真空阀11的阀位状态;
本发明的一可选实施例中,所述电动真空阀11上设有开到位行程开关12以及关到位行程开关13;
所述开到位行程开关12在监测到所述电动真空阀的运动机构向第一方向运动至完全打开状态时,产生第一状态信号;
所述关到位行程开关13在监测到所述电动真空阀的运动机构向第二方向运动至完全关闭状态时,产生第二状态信号。
该实施例中,所述开到位行程开关12以及关到位行程开关13均可以是限位传感器,当所述电动真空阀11的运动机构向第一方向运动至接触到一端的限位传感器时,此端限位传感器会产生第一状态信号,以表示所述运动机构向第一方向运动至完全打开状态;当所述电动真空阀11的运动机构向第二方向运动至接触到另一端的限位传感器时,此端限位传感器会产生第二状态信号,以表示所述运动机构向第二方向运动至完全关闭状态;同时产生的第一状态信号或第二状态信号会反馈至控制器6,控制器6根据第一状态信号或第二状态信号发出停机指令,控制所述运动机构停止运动;
通过所述运动机构在运动过程中反馈的状态信号,可以实现运动机构向两个方向运动的精准控制,进而实现电动真空阀完全打开或完全关闭的精准控制,避免损坏直流电机及运动机构。
如图3所示,本发明的一可选实施例中,所述的直流电机的电动真空阀的控制系统,还可以包括:
与所述正反转模块10正极供电端电连接的至少一个电流传感器14,所述电流传感器14还与所述控制器6通讯连接,用于监测所述电动真空阀11的运动机构向第一方向运动或者向第二方向运动过程中产生的电流信号,在所述电流信号超过一预设电流阈值时,控制所述电动真空阀11的运动机构停止运动。
该实施例中,所述电流传感器14实时监测所述电动真空阀11的运动机构在运动过程中的电流,并产生电流信号,同时将产生的电流信号实时反馈至所述控制器6;应当知道的是,在所述电动真空阀11的运动机构稳定运行的过程当中以及刚接触到开到位行程开关12或关到位行程开关13时,所述电流传感器14监测到的实时电流的大小应当是一致的,当反馈至控制的电流信号表示监测到的实时电流大于一预设电流阈值时,说明此时开到位行程开关12或关到位行程开关13已出现故障,不能正常反馈电动真空阀11打开或关闭的完全状态,且电动真空阀11的运动机构已开始挤压开到位行程开关12或关到位行程开关13;此时电流传感器14会根据当前监测到的大于预设电流阈值的实时电流产生电流信号并反馈至控制器6,控制器6根据所述电流信号发出停机指令,控制所述运动机构停止运动;
通过电流传感器14实时监测运动机构运动过程中的电流并实时反馈至控制器6,在开到位行程开关12或关到位行程开关13出现故障或反应不灵敏时,可以避免损坏运动机构,降低直流电机不必要的能耗;
优选的,所述电流传感器14通过模拟量输入模块9与所述控制器6通信连接;所述电流传感器14的输出端与所述模拟量输入模块9的AI0.0信号接口通信连接,所述电流传感器产生的电流信号通过所述模拟量输入模块9的AI0.0信号接口传输至所述模拟量输入模块9,进一步通过所述模拟量输入模块9将所述电流信号传输至所述控制器6。
本发明的一可选实施例中,所述的直流电机的电动真空阀的控制系统,还可以包括:供电装置;
所述供电装置包括:总断路器1、控制断路器2、主断路器3、控制电源4、主电源5;
所述总断路器1的输入端接入外电网220V工频交流电,输出端分别与所述控制断路器2的输入端、所述主断路器3的输入端电连接,用于控制控制系统的整体供电;
所述控制断路器2的输出端与所述控制电源4电连接,用于控制所述控制电源4为所述控制器6、所述电流传感器14供电;
所述主断路器3的输出端与所述主电源5的一端电连接,用于控制所述主电源5为所述正反转模块10供电。
该实施例中,所述供电装置控制整个控制系统供电的开断,以保证控制器6、、正反转模块10、直流电机的电动真空阀11、电流传感器14等器件可以正常运行;
所述总断路器1的输入端接入外电网220V工频交流电,其输出端分别电连接所述控制断路器2及所述主断路器3;所述控制断路器2电连接所述控制电源4,所述控制电源4将220V工频交流电转换为24V直流电;所述控制电源4电连接控制器66以及电流传感器14,并为控制器66以及电流传感器14供电;所述主断路器3电连接所述主电源5,所述主电源5将220V工频交流电转换为24V直流电,所述主电源5电连接正反转模块10,并为正反转模块10供电。
本发明的一可选实施例中,所述正反转模块10通过数字量输出模块8与所述控制器6通信连接,所述正反转模块10根据接收到的所述数字量输出模块8传输的第一控制信号控制直流电机正向运动,根据接收到的所述数字量输出模块8传输的第二控制信号控制直流电机反向运动。
该实施中,所述正反转模块10为包含外壳的元器件,其内部包含电路板,所述电路板上还分别设备有两个通信接口A+和B+,所述更进一步的,所述正反转模块10的通信接口A+与所述数字量输出模块8的DO0.0信号接口通信连接,所述正反转模块10的通信接口B+与所述数字量输出模块8的DO0.1信号接口通信连接,实现所述正反转模块通过数字量输出模块8与控制器6通信连接。
本发明的一可选实施例中,所述正反转模块10包括:
信号判断电路以及与所述信号判断电路电连接的直流电机控制电路,所述信号判断电路根据所述控制器6输入的第一控制信号控制所述直流电机控制电路的电流输出方向为正向,或者,根据所述控制器6输入的第二控制信号控制所述直流电机控制电路的电流输出方向为正向。
该实施例中,所述正反转模块10电路板上的电路具体可以包括:信号判断电路以及与所述信号判断电路电连接的直流电机控制电路;通信接口A+和B+接入所述信号判断电路中,所述信号判断电路通过所述通信接口A+进入所述控制器6输入的第一控制信号,并根据所述第一控制信号控制所述直流电机控制电路的电流输出方向为正向,或通过所述通信接口B+接入控制器6输入的第二控制信号,并根据所述第二控制信号控制所述直流电机控制电路的电流输出方向为正向,进而实现与所述直流电机连接的电动真空阀11的运动机构向第一方向或第二方向运动。
如图4所示,本发明的一可选实施例中,所述直流电机控制电路包括:
第一接触器KM1;
与所述第一接触器KM1并联的第二接触器KM2;所述第一接触器KM1与所述第二接触器KM2的输入端分别与主电源5的两端电连接;所述第一接触器KM1与所述第二接触器KM2的输出端分别与直流电机电连接。
如图4所示,所述信号判断电路包括:
第一接触开关SB1,所述第一接触开关SB1的第一端与主电源5正极电连接;
第二接触开关SB2,所述第二接触开关SB2的第一端与所述第一接触开关SB1的第二端电连接,所述第二接触开关SB2的第二端通过第二接触器辅助常闭触点与第一继电器的第一端电连接;
第三接触开关SB3,所述第三接触开关SB3的第一端与所述第一接触开关SB1的第二端电连接,所述第三接触开关SB3的第二端与通过第一接触器辅助常闭触点与第二继电器的第一端电连接;
所述第一继电器的第二端电连接与第一继电器的第二端电连接;
第一接触器辅助常开触点,所述第一接触器辅助常开触点的两端分别与所述第二接触开关SB2的两端电连接;
第二接触器辅助常开触点,所述第二接触器辅助常开触点的两端分别与第三接触开关SB3的两端电连接。
该实施例中,在所述电动真空阀11的运动机构正常运行的过程当中,所述正反转模块11电路中的第一接触开关SB1处于导通的闭合状态;
当所述正反转模块10通过通信接口A+接收到控制器6发送的第一控制信号后,第二接触开关SB2闭合导通,第一继电器线圈得电导通,与第二接触开关SB2并联的第一接触器辅助常开触点闭合,以保证第一继电器线圈持续通电,串联在直流电机控制电路中的第一接触器KM1的主触点持续闭合,则主电源5的正极V+和负极V-信号分别通过正反转模块的第四引脚D和第二引脚C输入到直流电机中,并驱动直流电机正向运动;
当所述正反转模块10通过通信接口B+接收到控制器6发送的第二控制信号后,第三接触开关SB3闭合导通,第二继电器线圈得电导通,与第三接触开关SB3并联的第二接触器辅助常开触点闭合,以保证第二继电器线圈持续通电,串联在直流电机控制电路中的第二接触器KM2的主触点持续闭合,则主电源5的正极V+和负极V-信号分别通过正反转模块的第二引脚和第四引脚输入到直流电机中,并驱动直流电机反向运动;
当控制器6根据接收到的第一状态信号或第二状态信号或电流信号大于预设电流阈值而产生停机指令时,停机指令会同时向正反转模块10的通信接口和通信接口B+发送,当所述正反转模块10的通信接口和通信接口B+同时接收到停机指令时,第一接触开关SB1断开,第一继电器线圈和第二继电器线圈失电,第一接触器KM1和第二接触器KM2的主触点都处于断开状态,则主电源5的信号无法到达直流电机,直流电机停止运动,电动真空阀11停止向第一方向或第二方向运行;
通过正反转模块10中的信号判断电路接收到控制器6输入的第一控制信号或第二控制信号或停机指令,进一步控制直流电机控制电路的电流输出方向为正向或者反向或者断开直流电机控制电路,以实现直流电机的电动真空阀向第一方向运动或第二方向运动或停止运动,到达精准控制电动真空阀的效果,从而提高直流电机的运行效率,同时可以避免损坏电动真空阀11。
本发明的一可选实施例中,所述开到位行程开关12及关到位行程开关13通过数字量输入模块7与所述控制器6通信连接;
所述开到位行程开关12的输出端与所述数字量输入模块7的DO0.0信号接口通信连接,所述关到位行程开关13的输出端与所述数字量输入模块7的DO0.1信号接口通信连接。
该实施例中,所述开到位行程开关12产生的第一状态信号通过所述数字量输入模块7的DO0.0信号接口传输至数字量输入模块7,所述关到位行程开关13产生的第二状态信号通过数字量输入模块7的DO0.1信号接口传输至数字量输入模块7,以实现状态信号的传递与反馈;
进一步的,所述电流传感器14通过模拟量输入模块9与所述控制器6通信连接;所述电流传感器14的输出端与所述模拟量输入模块9的AI0.0信号接口通信连接,所述电流传感器产生的电流信号通过所述模拟量输入模块9的AI0.0信号接口传输至模拟量输入模块9。
本发明的实施例还提供一种直流电机的电动真空阀的控制方法,应用于如上述实施例所述的直流电机的电动真空阀的控制系统,所述方法包括:
步骤11,接收控制器6发送的控制信号;
步骤12,根据所述控制信号控制直流电机正向运动并带动所述电动真空阀11的运动机构向第一方向运动或者控制直流电机反向运动并带动所述电动真空阀11的运动机构向第二方向运动;
步骤13,根据所述电动真空阀11的运动机构向第一方向运动至完全打开状态的第一状态信号控制所述运动机构停止运动,或者根据所述电动真空阀11的运动机构向第二方向运动至完全关闭状态的第二状态信号控制所述运动机构停止运动。
该实施例中,通过连接于所述电动真空阀111的供电线路上的至少一个正反转模块10接收控制器6发送的控制信号,并根据所述控制信号控制直流电机正向运动并带动所述电动真空阀11的运动机构向第一方向运动或者控制直流电机反向运动并带动所述电动真空阀11的运动机构向第二方向运动;
在所述电动真空阀11的运动机构向第一方向或第二方向运动至接触到所述开到位行程开关12或关到位行程开关13时,所述开到位行程开关12会产生所述电动真空阀的运动机构向第一方向运动至完全打开状态的第一状态信号,或所述关到位行程开关13会产生所述电动真空阀的运动机构向第二方向运动至完全关闭状态的第二状态信号,并通过数字量输入模块7将所述第一状态信号或第二状态信号传输至控制器6,所述控制器6根据所述第一状态信号或第二状态信号输出停机指令,传输至所述正反转模块10,并通过所述正反转模块10控制所述运动机构停止运动,以实现直流电机的电动真空阀打开与关闭的精准控制,提高直流电机运动效率;
更进一步的,当所述开到位行程开关12或关到位行程开关13时出现故障或不灵敏时,根据所述电流传感器监测到的电动真空阀10的运动机构在向第一方向或第二方向运动时的实时电流,且在实时电流大于预设电流阈值时,说明运动机构已运行至完全打开或完全关闭状态,此时电流传感器会反馈电流信号至控制器6,控制器6根据所述电流信号发出停机指令,并传输至正反转模块10,正反转模块10控制所述运动机构停止运动;通过电流传感器14实时监测运动机构运动过程中的电流并实时反馈至控制器6,在开到位行程开关12或关到位行程开关13出现故障或反应不灵敏时,可以避免损坏运动机构,降低直流电机不必要的能耗。
本发明的上述实施例,通过正反转模块、开到位行程开关、关到位行程开关以及电流传感器可以实现市场上绝大多数24V直流电机驱动的电动真空阀的打开或关闭;且可以实现控制一个或多个电动真空阀同时工作;同时通过控制系统与上位机、显示屏的实时通信,实时显示电动真空阀的阀位状态以及电动真空阀的运行机构在运行时的实时电流,可以实现直流电机的电动真空阀的远程控制。
以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 电动真空阀的排气速度控制方法、排气速度控制系统及阀开度设定点决定方法
- 电动真空阀的排气速度控制方法、排气速度控制系统及阀开度设定点决定方法