一种多目标优化的个性化路径选择方法
文献发布时间:2023-06-19 09:24:30
技术领域
本发明涉及智能交通安全技术领域,特别是关于一种多目标优化的个性化路径选择方法。
背景技术
近年来,无论是手机APP还是车载系统,都已具备较为成熟的路径规划算法,当系统获取电子地图且输入出发点、目的地后便可输出一条路径。然而,当前的路径规划存在以下问题:1)没有考虑道路安全目标因素,对行车安全性保障不足。对于部分驾驶员,行车安全性是一个重要的考量目标因素,受限于驾驶年限、经验等,部分驾驶员更加倾向在车况简单、不易发生事故的道路行驶,然而当前的路径规划方法没有考虑行车安全性这一变量;2)当前路径选择方法只有几种离散的选择模式(时间最少、路程最短等),无法精准满足驾驶员的个体差异与需求。很多驾驶员并非仅仅对单一的优化目标有需求,例如某些驾驶员既希望行车时间短,还希望行车安全性尽可能高,且安全性与时间同等重要,则对于这些驾驶员,当前没有一种能够考虑多种目标因素的路径选择方法。
当前的主要路径规划方法主要基于Dijktra算法以及Bellman-Ford算法,在此二者基础上进行一定的优化。但是目前的优化方法主要目的依旧集中在提高搜索效率,没有考虑驾驶员对行车安全性的需求,且无法同时满足驾驶员对不同目标因素的个性化需求。
发明内容
本发明的目的在于提供一种多目标优化的个性化路径选择方法来克服或至少减轻现有技术的上述缺陷中的至少一个。
为实现上述目的,本发明提供一种多目标优化的个性化路径选择方法,其该方法包括:
步骤1,判断出发点与目的地之间是否存在一条以上的潜在路径,若存在,则进入步骤2;若仅存在唯一路径,则输出该路径;
步骤2,驾驶员输入各目标因素的倾向权重,计算各目标因素在路径选择中所占据的比重;
步骤3,根据步骤2确定的单目标因素,挑选出单目标因素对应的最优的M
步骤4,计算目标因素对应的一条备选路径的评分值:
步骤5,计算每一条备选路径的综合期望加权得分:
步骤6,从所有的备选路径中选择最高的备选路径,作为最终路径输出。
进一步地,第m条备选路代表M
时间目标因素time的累计值对应为通行预计总时间,第m条备选路径对应的通行预计总时间的计算方法包括:
利用式(2)计算每一条备选路径中的单一路段所需要的通行时间t
式(2)中,S
进一步地,安全目标因素safe的累计值对应为路径总风险值,第m条备选路径的路径总风险值的计算方法包括:
定义第n个单一路段的风险值R
进一步地,R
进一步地,能耗energy的累计值对应为通行预计总能耗,第m条备选路径的通行预计总能耗的计算方法具体包括如下步骤:
步骤31,对单一路段预测三种交通状况的出现概率分布,三种交通状况可以抽象为交通情况通畅状态、在路口等待红灯且前方道路情况通畅的状态和交通拥堵状态;
步骤32,根据v-t曲线计算单一状态下的预期油耗,通过车辆动力学方程获得大致的总能耗:
式(3)中,I
车辆受到的阻力矩T
式(4)中,m
计算得到T
步骤33,计算第m条备选路径的加权总期望能耗值Energy
式(5)中,
进一步地,步骤4采用式(6)计算目标因素item对应的第m条备选路径的评分值
式(6)中,min
进一步地,步骤5利用式(11)计算第m条备选路径的综合期望加权得分
本发明由于采取以上技术方案,其具有以下优点:
本发明将行车安全性作为优化指标,同时能够根据用户需求综合考虑安全、能耗、时间三种目标因素对路径选择的影响,使得整体路径选择能够更好地满足驾驶员需求。
附图说明
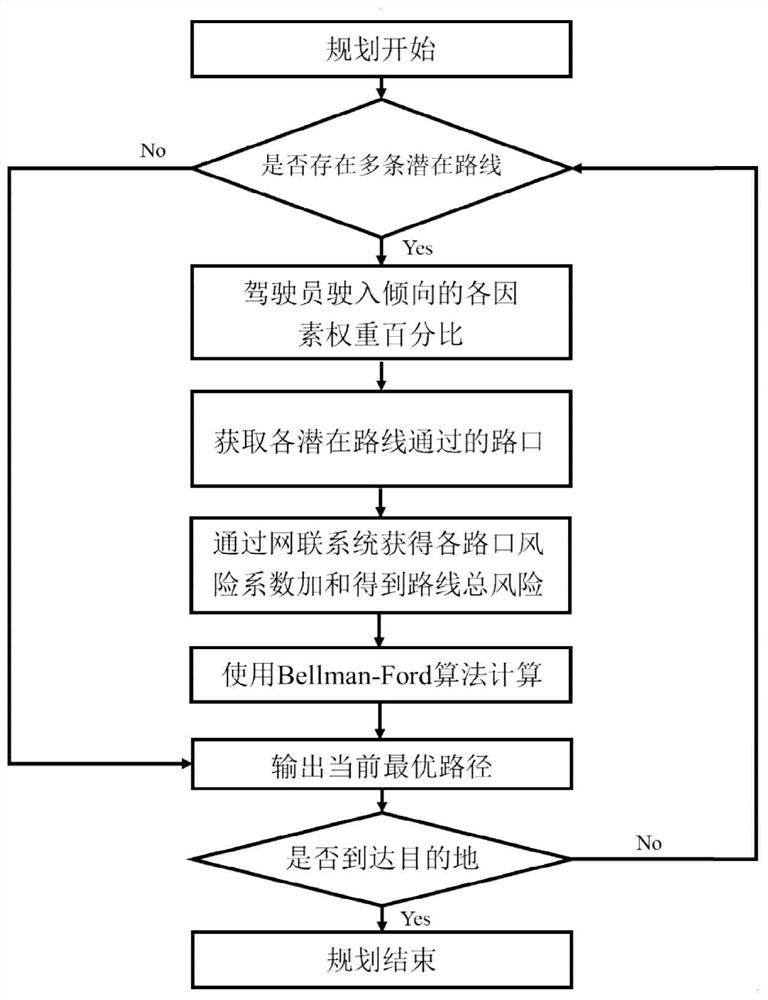
图1为本发明实施例提供的个性化路径选择方法的流程图。
图2为三种交通状况对应的三种v-t曲线示意图。
具体实施方式
下面结合附图和实施例对本发明进行详细的描述。
如图1所示,本发明实施例提供的多目标优化的个性化路径选择方法包括:
步骤1,判断出发点与目的地之间是否存在一条以上的潜在路径,若存在,则进入步骤2;若仅存在唯一路径,则输出该路径。
其中,出发点与目的地可由用户输入。通过在路网文件中检测出发点与目的地之间的可通行节点,若存在数量不少于两个的路口节点,则判定为存在一条以上的潜在路径,反之,则说明仅存在唯一路径。路网文件可由导航软件或过地图绘制得到的,其主要描述了各个路口节点之间的道路连接情况等。
步骤2,驾驶员输入各目标因素item的倾向权重T
式(1)中,W
例如:
在一个实施例中,目标因素item在路径选择中所占据的比重W
式(1)的加权方法为一次项加权,也可以采用其它方法,诸如二次项加权等,
通过该步骤,驾驶员可以根据驾驶员的需求,调整三目标因素各自的比重。
步骤3,根据步骤2确定的单目标因素,利用Bellman-Ford(BF)算法或者Dijkstra等方法挑选出单目标因素item对应的最优的M
其中,第m条备选路代表M
下面介绍每一条备选路径对应的单目标因素累计值计算方法。
(一)时间目标因素time的累计值对应为通行预计总时间,第m条备选路径对应的通行预计总时间的计算方法包括:
利用式(2)计算每一条备选路径中的单一路段所需要的通行时间t
式(2)中,S
v
(二)安全目标因素safe的累计值对应为路径总风险值,第m条备选路径的路径总风险值的计算方法包括:
定义第n个单一路段的风险值R
其中,R
在一个实施例中,路径总风险值还可以采用计算车辆在这条路段中发生事故的比例的方法获得,例如选取过去一个月作为时间段,一个月内发生事故的车辆数量/一个月内通过的总车流量即为事故率,再计算一条路径上所有道路的事故率之和即可。
(三)能耗energy的累计值对应为通行预计总能耗,第m条备选路径的通行预计总能耗的计算方法具体包括如下步骤:
步骤31,对单一路段预测三种交通状况的出现概率分布,三种交通状况可以抽象为如图2中示出的三种v-t曲线示意的三种交通状态:
图2a示出的是该路段呈现为交通情况通畅状态,可以按照道路设计的时速稳定通过,因此整体v-t曲线表现为水平直线。图2b示出的是该路段由于红绿灯信号影响,在进入该道路前遇到红灯停车,但道路情况较为通畅,可以由较低车速匀加速至理想车速,因此,图2b呈现的是在路口等待红灯且前方道路情况通畅的状态。图2c示出的该路段呈现为交通拥堵状态,在行驶过程中会遇到停车排队等候的情况,因此曲线表现为先匀减速下降,在经过一段时间静止后再匀加速上升。
由于道路交通是一个持续变化的状态,因此在路径规划时无法确定在抵达该路段时的具体车况,故本实施例采用在预测能耗时以概率分布的形式进行加权预测。比如:记单一路段n出现图2a中的交通情况通畅的概率为
在一个实施中,也可以通过大数据分析等方法,直接通过先前类似的车况交通场景下车辆所消耗的能耗,作为通行预计总能耗。
步骤32,根据v-t曲线计算单一状态下的预期油耗,通过车辆动力学方程获得大致的总能耗。一般地,有车辆整体的纵向动力学方程:
式(3)中,I
车辆受到的阻力矩T
式(4)中,m
计算得到T
步骤33,计算第m条备选路径的加权总期望能耗值Energy
式(5)中,
步骤4,采用式(6)计算目标因素item对应的第m条备选路径的评分值
式(6)中,min
例如:以总计M
第m=1条备选路径的item项的评分为式(7):
通过式(7)计算得到的第m=1条备选路径对应的通行预计总时间为1000秒。
第m=2条备选路径的item项的评分为式(8):
通过式(8)计算得到的第m=2条备选路径对应的通行预计总时间为90.9秒。
第m=3条备选路径的item项的评分为式(9):
通过式(9)计算得到的第m=3条备选路径对应的通行预计总时间为83.3秒。
在一个实施例中,采用式(10)计算目标因素item对应的第m条备选路径的评分值
安全性目标因素safe以及能耗目标因素energy对应的若干备选路径的评分方法与上述举例相同,在此不再赘述。
步骤5,利用式(11)计算第m条备选路径的综合期望加权得分
步骤6,从所有的(M
最后需要指出的是:以上实施例仅用以说明本发明的技术方案,而非对其限制。本领域的普通技术人员应当理解:可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
- 一种多目标优化的个性化路径选择方法
- 一种基于步进环栅的输电线路的多目标优化路径选择方法