基于元学习的不同极化方式HRRP融合目标小样本识别方法
文献发布时间:2023-06-19 10:00:31
技术领域
本发明属于雷达目标识别领域,具体涉及一种基于元学习(Meta-Learning)的不同极化方式HRRP融合目标小样本识别方法,该方法利用一种极化方式的雷达高分辨距离像(High Resolution Range Profile,HRRP)数据进行训练,利用另一种极化方式的雷达HRRP数据进行测试的数据层面融合的小样本目标识别。
背景技术
电磁波的极化特性是雷达系统天线发射与接收信号的一种重要属性。根据电磁波的传播原理,不同极化方式的电磁波对目标会产生不同的响应,能够得到丰富的目标信息。典型的雷达系统中具有发射天线和接收天线,雷达天线发射和接收电磁波的电场矢量,能够在水平方向(H)或者垂直方向(V)被偏振,目前,合成孔径雷达(SAR)系统中常用的四种极化方式分别为——HH极化方式、HV极化方式、VV极化方式和VH极化方式。其中HH表示雷达发射水平电场矢量,接收水平电场矢量,HV表示雷达发射水平电场矢量,接收垂直电场矢量,其余两种雷达电磁波极化方式的含义类似于以上两种极化方式。雷达在工作时,通过发射电磁波对被测目标进行探测,电磁波在遇到被测物体时会进行反射和散射,雷达通过接收天线接收被测物体反射和散射的雷达回波,通过对雷达回波做距离压缩的处理,便可得到被测物体的HRRP。
雷达HRRP能够反映被测目标散射点沿着雷达视线方向的径向分布情况,可以提供被测目标的大小以及散射点分布等目标信息,与二维雷达图像相比较,具有成像简单,处理简便的优势,已被广泛应用于雷达目标识别领域。通过对不同极化方式的雷达回波做HRRP处理,能够得到不同极化方式的HRRP数据,体现不同的雷达目标结构和散射点分布信息。然而,目前一般的做法是根据不同的被测目标的结构特征和散射点分布特点,选用以上四种极化方式中的一种极化方式(一般选用HH极化方式)的雷达HRRP进行目标识别的工作,导致可用于识别的HRRP数据样本少,雷达目标识别准确率低的问题。本发明提出一种数据层面的融合方法,即融合不同极化方式的HRRP数据进行雷达目标识别工作,不同极化方式的HRRP 数据能够提供同一目标不同的目标结构和散射点分布信息,利用不同极化方式的HRRP数据进行雷达目标识别,具有重要的工程应用价值。
目前基于深度学习的HRRP融合目标识别的框架可大致分为特征提取模块和分类模块。特征提取模块负责提取出HRRP的不同特征,将不同的特征进行融合,作为目标识别的融合特征;一般采用深度学习神经网络作为分类模块,分类模块以融合特征作为输入,对HRRP 进行目标识别。这样做的问题在于:第一,提取出的特征具有片面性,虽然融合了不同的特征,但是提取特征的过程不免会造成关键信息的缺失;第二,深度学习神经网络模型通常需要大量带有标签的数据样本来拟合,从而得到比较好的识别效果以及泛化能力,而只采用一种极化方式的HRRP会导致数据量少即小样本的问题,一旦数据量不够,就会使得深度学习神经网络模型只对用以训练的样本表现出比较好的识别效果,对新样本缺乏泛化能力,导致识别准确率下降。因此,需要一种新的识别算法,充分利用不同极化方式的HRRP数据,提高HRRP小样本目标识别的准确率,提高目标识别模型的泛化能力。
快速学习能力是人类与机器智能的主要区别,人类具有从少量样本中快速学习的能力,能够举一反三、融会贯通,受到人类能够利用以往的学习经验进行快速学习的启发,有研究者提出了元学习(Meta-Learning)“利用之前的学习经验学习如何学习”的概念。元学习是指从机器学习算法在不同学习任务上的差异中获取信息和经验,用以指导更快更好地学习新任务。元学习又叫做“学习如何学习(Learn how to learn)”,是一种学习如何跨任务学习的学习方法,当针对一个新的学习任务构建机器学习算法时,元学习能以之前学习过的任务为基础,利用从学习过的任务中获取的信息和经验,快速地学习新任务,是一种基于其他任务的先验知识和经验进行学习的方法。元学习旨在建立一个能够快速学习新任务的模型。元学习一般利用深度神经网络进行实现,结构可以分为学习器(Learner)和元学习器(MetaLearner)两个模块,学习器主要负责对某一个特定的任务进行学习,例如学习如何识别猫和狗。元学习器主要负责从不同任务中学习经验和知识,用以指导学习器进行快速学习,例如,元学习器从如何识别猫和狗中学习到了经验和知识,并将这些知识应用到指导学习器如何学习识别苹果和橘子的任务中,最终达到通过元学习器的指导,学习器能够更快更好地学习新的任务的效果(学习器和元学习器的概念见参考文献:Ravi S,Larochelle H.Optimization as a model for few-shot learning[J].2016.)。元学习的训练方式和传统深度学习的训练方式有较大的差别,传统深度学习的训练方式一般可以表述为,首先将数据集D
针对目前HRRP目标识别方法只利用一种极化方式的HRRP数据导致HRRP小样本的问题以及基于传统深度学习的特征融合HRRP目标识别方法在小样本条件下容易导致识别准确率低,模型泛化能力差的问题,本发明提出了一种基于元学习的,利用一种极化方式HRRP 数据进行训练,利用另一种极化方式HRRP数据进行测试的数据层面融合的小样本目标识别方法,有效缓解了HRRP小样本目标识别存在的识别准确率低,泛化能力差的问题,具有重要的工程价值。
发明内容
本发明要解决的技术问题是在雷达HRRP目标识别领域,只利用一种极化方式的HRRP 数据导致HRRP小样本的问题以及基于传统深度学习的特征融合HRRP目标识别方法在小样本条件下容易导致识别准确率低,模型泛化能力低的问题,以上两个问题难以满足工程的应用需求。
本发明的思路是利用元学习的快速学习能力以及天生对小样本识别的优势,利用一种极化方式的HRRP数据进行训练,然后利用另一种极化方式的HRRP数据进行测试的数据层面融合的小样本目标识别方法。该方法将不同极化方式的HRRP数据进行融合,具体而言,利用一种极化方式的HRRP数据进行训练,利用另一种极化方式的HRRP数据进行测试,构建元学习网络,元学习网络由两个结构不同的长短时记忆(LSTM)网络——Learner和MetaLearner构成,Learner和MetaLearner分别对应元学习概念中的学习器和元学习器,Learner 用于实现对不同雷达目标的HRRP样本进行识别,MetaLearner利用从一种极化方式HRRP目标识别中学到的经验和知识来指导Learner更好地实现另一种极化方式HRRP目标识别。
本发明解决其技术问题所采取的方案是,一种基于元学习的不同极化方式HRRP融合目标小样本识别方法,包括以下步骤:
S1将不同极化方式的雷达回波数据进行数据预处理以及划分训练集和测试集:
S1.1对雷达回波做HRRP处理得到HRRP数据:
假设雷达发射的是线性调频信号,雷达的发射信号可以写为
S1.2对由S1.1得到的HRRP数据进行数据预处理:
不同雷达目标,不同极化方式的雷达数据经过S1.1的处理以后,得到的是不同的HRRP 数据。原始的HRRP数据中,每一个HRRP样本是一个n维的向量,假设对快时间t
S1.3对不同极化方式的HRRP划分训练集和测试集:
假设有p类雷达目标,从HH、HV、VV和VH这四种极化方式中选择一种极化方式的p类雷达目标的HRRP数据作为训练集D
S2构建元学习网络结构。采用的元学习网络结构可以分为学习器——Learner和元学习器——MetaLearner。两个模块结合在一起,组成元学习网络。
S2.1构建元学习器——MetaLearner,假设元学习器的参数为Θ,Θ为需要通过迭代进行优化的参数,Θ
S2.1.1构建输入层:输入层是全连接层,输入层的神经元个数为4。
S2.1.2构建LSTM层:LSTM层接在输入层后面,LSTM层由8个LSTM神经元构成。
S2.2构建学习器——Learner,假设学习器的参数为θ,θ为需要通过迭代进行优化的参数,θ
Learner的结构由输入层,LSTM层和分类层构成,按照以下步骤分别构建:
S2.2.1构建输入层:输入层为全连接层,输入层的神经元个数为k个,对应于每个HRRP 样本的k个点。
S2.2.2构建LSTM层:输入层后面接LSTM层,LSTM层由2k个LSTM神经元构成。
S2.2.3构建分类层:分类层由一个全连接层,一个Sigmoid层和一个softmax层构成,其中第一个全连接层接在LSTM层后面,神经元的个数和LSTM层的神经元个数相同,第一个全连接层后面接Sigmoid层,用于调整神经元的输出,Sigmoid层后面接一个神经元个数为p 的softmax层,用于对p类雷达目标进行分类。
S2.3将学习器Learner和元学习器MetaLearner进行结合,组成元学习网络。
学习器和元学习器通过传递网络参数的方法进行结合,具体按照以下步骤实现:
S2.3.1假设当前为第t次迭代,定义所有上标为t的物理量表示第t次迭代该物理量的值,上标为t-1的物理量为第t-1次迭代该物理量的值,上标为0表示第0次迭代该物理量的值 (即该物理量的初始值)。将第t-1次迭代学习器的网络参数θ
x
S2.3.2元学习器通过式(2)、式(3)、式(4)对学习器的网络参数θ
其中f
S3训练元学习器MetaLearner:
S3.1采用Xavier初始化的方式初始化MetaLearner的参数Θ=Θ
S3.2假设当前为第t次迭代,从训练集中的支撑集D
S3.3通过式(5)、式(6)得到第t-1次迭代MetaLearner元学习器LSTM层的遗忘门f
将由S3.2得到的
S3.4将训练集中的质询集D
其中,L(x
利用公式(8)对MetaLearner的参数进行更新:
其中α
S3.5重复步骤S3.2-S3.4,直至训练集中的支撑集D
记训练后的元学习器为MetaLearner-last。
S4利用S3训练后得到的元学习器MetaLearner-last指导学习器Learner完成对另一种极化方式下不同雷达目标的HRRP数据的识别:
S4.1采用Xavier初始化的方式初始化Learner的参数θ=θ
S4.2假设当前为第T次迭代,从数据集D
S4.3将
S4.4重复S4.2-S4.3直至测试集中的支撑集D
S4.5将测试集中的质询集D
本发明取得的有益效果为:提出了一种有效的融合由不同极化方式产生的HRRP数据的识别方法,本发明提出的融合方式是基于数据层面的融合方式,能够缓解基于特征层面的融合存在的雷达目标识别的最终结果很大程度上依赖于特征选取好坏的问题;将元学习的方法引入雷达小样本识别当中,在一定程度上缓解了小样本条件下,雷达目标识别准确率低,泛化能力差的问题,对于小样本条件下,融合由不同极化方式产生的HRRP数据进行目标识别具有重要的工程应用价值。
附图说明
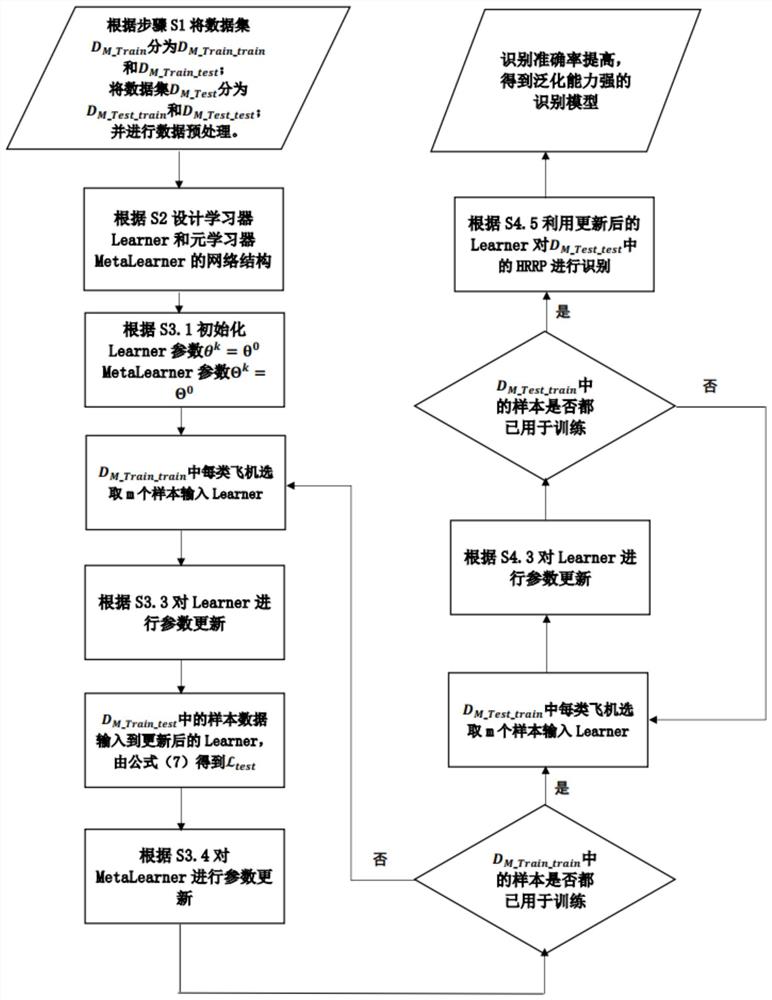
图1为本发明的实施流程图;
图2为传统RNN的模型结构图:(a)RNN原始模型;(b)RNN内部计算单元展开模型;
图3为LSTM计算单元结构图;
图4为本发明元学习网络的前向传播示意图;
图5为本发明学习器的网络结构;
图6为本发明元学习器的网络结构;
图7为HH极化方式下产生的三种飞机的HRRP:(a)飞机A的HRRP;(b)飞机B的 HRRP;(c)飞机C的HRRP;
图8为HV极化方式下产生的三种飞机的HRRP:(a)飞机A的HRRP;(b)飞机B的 HRRP;(c)飞机C的HRRP;
图9为本发明的方法与传统RNN、LSTM方法在小样本条件下对三类飞机HRRP的识别准确率对比曲线;
图10为本发明的方法在不同训练样本数量的条件下对三类飞机HRRP的识别准确率曲线。
具体实施方式
下面结合附图对本发明进行进一步说明:
图1为本发明的总体处理流程。本发明所述基于元学习的不同极化方式HRRP融合目标小样本识别方法,分为以下步骤:
S1将不同极化方式的雷达回波数据进行数据预处理以及划分训练集和测试集。
S2构建元学习网络结构。采用的元学习网络结构可以分为学习器——Learner和元学习器——MetaLearner。两个模块结合在一起,组成元学习网络。
S3训练元学习器MetaLearner。
S4利用S3训练后得到的元学习器MetaLearner-last指导学习器Learner完成对另一种极化方式下不同雷达目标的HRRP数据的识别。
图2为传统RNN的模型结构图和展开后的计算结构图,图3为典型LSTM网络一个计算单元的内部结构图,其中图3中各变量的含义见LSTM计算单元的前向计算公式(11)-(18):
f
i
o
g
C
H
其中,f
图2和图3有助于理解LSTM的工作原理。
图4为本发明网络的前向传播示意图,其中,标注“L”的方框表示Learner,Learner的网络结构见图5,图5是根据S2.2的描述,画出的Learner的网络结构,其中,x_1至x_k表示一个HRRP数据中的k个点,H_1至H_2k表示LSTM层最后一个神经元的2k个隐藏单元,f_1至f_2k表示全连接层的2k个神经元,s_1至s_2k表示Sigmoid层的2k个神经元, m_1至m_p表示Softmax层的p个神经元,最终由式(1)得到Learner网络的损失值Loss;标注为“MetaL”的方框表示MetaLearner,MetaLearner的网络结构见图6,图6是根据S2.1 的描述,画出的MetaLearner的网络结构,其中,x_1至x_4表示输入层的4个神经元,LSTM 层只含有一个LSTM神经元,LSTM输出学习器Learner的更新后的网络参数;黑色实线左边是D
本发明利用HH极化方式和HV极化方式下三种不同飞机(飞机A、飞机B和飞机C) 的HRRP数据进行实验。
图7为HH极化条件下,得到雷达回波数据,对雷达回波数据进行相应的雷达信号处理,得到三种不同飞机的HRRP数据像,从图中可以看出,三种不同飞机的HRRP数据像虽各有特点,但是形状类似,用人眼很难根据HRRP数据像分辨三种不同的飞机。
图8为HV极化条件下,得到雷达回波数据,对雷达回波数据进行同样的雷达信号处理,得到三种不同飞机的HRRP数据像,对比图7(a)和图8(a)可以看到,虽然都是飞机A的HRRP数据像,但是因为电磁波的极化方式不同,同一种飞机的HRRP数据像依然差别很大,所以采用传统的深度学习方法,用HH极化方式得到的HRRP数据像进行训练,训练后的网路去识别用HV极化方式得到的HRRP数据像效果会很差。
图9为本发明的方法与传统的基于RNN、LSTM网络在小样本条件下对三类飞机HRRP的识别准确率变化曲线。其中,本发明方法m=5的情况表示,采用本发明的方法,每次只用5个样本进行训练,得到的识别准确率变化曲线;本发明方法m=10的情况表示,采用本发明的方法,每次只用10个样本进行训练,得到的识别准确率变化曲线,这两种情况下,每类飞机用于训练的总样本数为450;LSTM方法HH训练HV测试表示,采用传统LSTM网络的方法,用HH极化方式得到的每类飞机450个样本进行训练,用HV极化方式得到的每类飞机300个样本进行测试,得到的识别准确率变化曲线;LSTM方法HV训练HV测试表示,采用传统LSTM网络的方法,用HV极化方式得到的每类飞机450个样本进行训练,用同样极化方式得到的每类飞机300个样本进行测试,得到的识别准确率变化曲线;RNN方法HH 训练HV测试表示,采用传统RNN网络模型,用HH极化方式得到的每类飞机450个样本进行训练,用HV极化方式得到的每类飞机300个样本进行测试,得到的识别准确率变化曲线; RNN方法HV训练HV测试表示,采用传统RNN网络模型,用HV极化方式得到的每类飞机450个样本进行训练,用HV极化方式得到的每类飞机300个样本进行测试,得到的识别准确率变化曲线。
分析图9可以看到,在小样本条件下,采用传统的RNN、LSTM网络对HRRP进行识别,不管是利用相同极化方式的数据进行训练还是利用不同极化方式的数据进行训练,都产生了过拟合的现象,存在模型识别准确率低,泛化能力差的问题。而本发明的方法在小样本条件下,对同一目标不同极化方式的HRRP数据像进行识别,实验采用“N-way,K-shot”的实验方式,N表示待识别目标的种类,在这里N=3,K表示每类待识别目标每次训练的样本数,在这里K=m,m=5时表示每次训练,每类目标只有5个样本参与训练,m=10时表示每次训练,每类目标只有10个样本参与训练。可以看到,不管是m=5还是m=10,本发明所采用的方法对目标的识别准确率都高于传统RNN、LSTM所采用的方法,本发明的方法在一定程度上缓解了传统深度学习方法在小样本条件下模型识别准确率低,泛化能力差的问题,具有重要的工程应用价值。
图10为m=10时,本发明的方法在不同训练样本数量的条件下,对三类飞机HRRP数据进行识别的准确率曲线。可以看到,随着每类目标训练样本数的增加,识别准确率也随之增加,在每类目标训练样本数为150时,本发明方法的识别准确率已经达到了50%以上,优于传统基于LSTM和RNN网络的识别方法。
综上所述,本发明可以有效利用不同极化方式的HRRP数据进行雷达目标识别,同时,本发明能够有效缓解传统深度学习在小样本条件下,出现的雷达目标识别准确率低,模型泛化能力差的问题,具有较高的工程应用价值。
- 基于元学习的不同极化方式HRRP融合目标小样本识别方法
- 基于元学习的不同极化方式HRRP融合目标小样本识别方法