一种巡检机器人的驱动机构及变电站巡检机器人
文献发布时间:2023-06-19 11:09:54
技术领域
本发明涉及机器人领域,特别是一种巡检机器人的驱动机构及变电站巡检机器人。
背景技术
许多变电站都修建在偏远的郊区,而对于电器设备需要定时检验,通过人工进行巡检不仅困难费时,而且室外环境的高电压、高辐射甚至化学污染,会对巡检人员的安全造成巨大的威胁。与此同时,由于电力设备的特殊性,随时都有出现故障的可能性,所以电力设备的维修成本很高,处理紧急情况的难度也很大。
发明内容
本发明的主要目的是克服现有技术的缺点,提供一种体积小,适用性强,可标记抄录变电站各项指标并进行智能分析,有效降低人工巡检劳动强度,降低变电站运维成本的巡检机器人的驱动机构及变电站巡检机器人。
本发明采用如下技术方案:
一种巡检机器人的驱动机构,包括底座和设置在底座上的多个行走轮,其特征在于:还包括有与多个行走轮一一对应的驱动装置,所述多个行走轮两两相对设置在底座两侧,驱动装置设置在底座内包括驱动电机和减速器,减速器的输入轴连接驱动电机的驱动轴,输出轴连接行走轮,减速器的输出轴与输入轴垂直布置,所述相对设置的行走轮所对应的驱动电机平行布置。
进一步地,所述减速器为L型行星减速器。
进一步地,所述驱动装置还包括控制驱动电机的电机驱动器,所述电机驱动器分布在底座左右两侧并于驱动电机连接。
进一步地,包括四个行走轮及与四个行走轮一一对应的四组驱动装置,所述行走轮两两一组相对设置在底座前后两部分。
进一步地,还包括有继电器和接线端子,所述继电器和接线端子布置在底座的中央。
一种变电站巡检机器人,包括如上述的一种变电站巡检机器人的驱动机构、多个超声波雷达、激光雷达支架、激光雷达、云台支架和云台模块,所述多个超声波雷达设置在底座上,激光雷达支架和云台支架设置底座顶端,激光雷达设置在激光雷达支架顶端,云台模块设置在云台支架顶端。
进一步地,所述多个超声波雷达设置在底座的前后两端。
进一步地,所述激光雷达支架采用铝型材搭建且可调节高度。
进一步地,所述云台支架采用铝型材搭建且可调节高度。
由上述对本发明的描述可知,与现有技术相比,本发明的有益效果是:四个行走轮都为驱动轮,显著提高了机器人的跃障性能和环境适应能力,可工作于室内外不同工况;减速器输出轴和输入轴的垂直布置,使相邻的两个电机可以水平布置,使得在四个行走轮都是驱动轮的情况下,减小机器人的尺寸,进一步提高机器人的适用性;云台采用铝型材搭建并可以调节高度,以适应更多工况。
附图说明
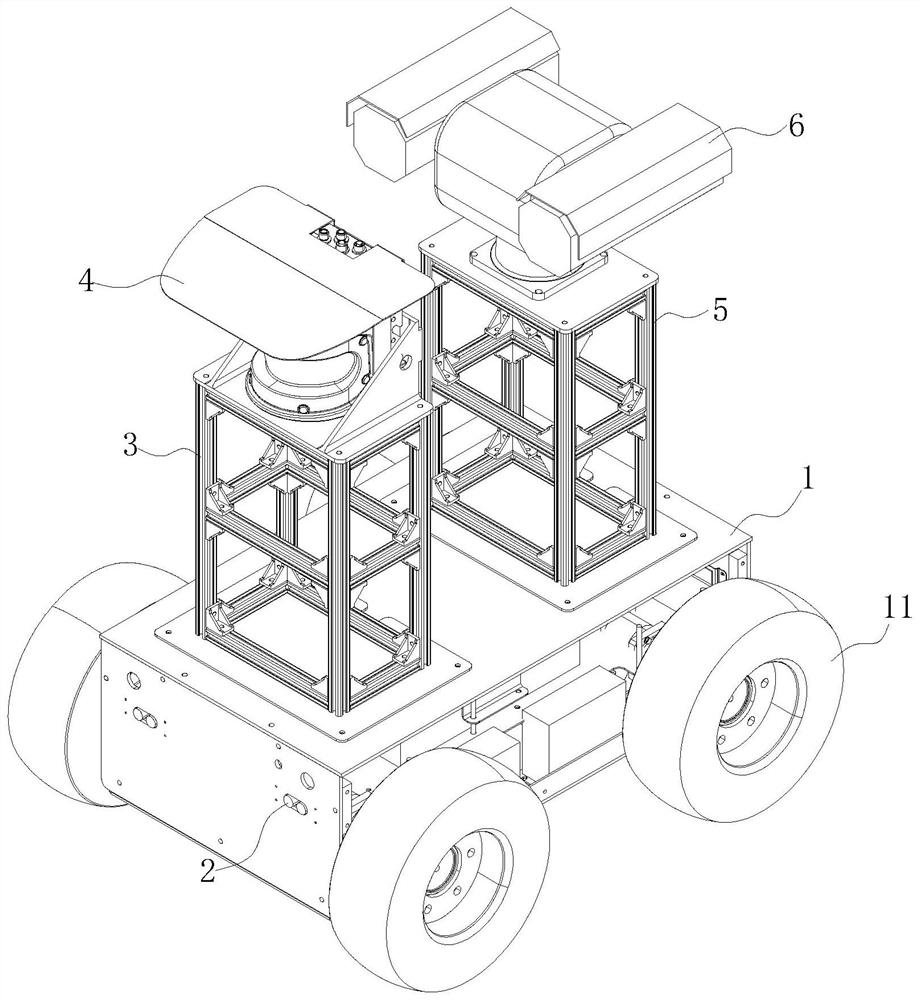
图1是本发明的具体实施方式的整体结构示意图;
图2是本发明的具体实施方式的驱动机构的结构示意图。
图中:1.驱动机构,10.底座,11.行走轮,12.驱动装置,120.驱动电机,121.减速器,122.电机驱动器,13.继电器,14.接线端子,2.超声波雷达,3.激光雷达支架,4.激光雷达,5.云台支架,6.云台模块。
具体实施方式
以下通过具体实施方式对本发明作进一步的描述。
参照图1和图2,本发明提供一种巡检机器人的驱动机构及变电站巡检机器人,包括巡检机器人的驱动机构1、超声波雷达2、激光雷达支架3、激光雷达4、云台支架5、云台模块6,巡检机器人的驱动机构1包括底座10,超声波雷达2设置在底座10两侧,前后各两个用于探测机器人与障碍物的距离,当距离小于一定值时,触发机器人停止,激光雷达支架3和云台支架5设置底座10顶端,激光雷达4设置在激光雷达支架3顶端用于机器人自主导航巡检,云台模块6设置在云台支架5顶端用于机器人读表测温等巡检工作,激光雷达支架3和云台支架5采用铝型材搭建并可调节高度。
巡检机器人的驱动机构1包括底座10和设置在底座10上的四个个行走轮11、与四个行走轮11一一对应的驱动装置12、继电器13和接线端子14,四个行走轮11两两相对设置在底座10两侧,驱动装置12设置在底座10内包括驱动电机120、减速器121和电机驱动器122,减速器121的输入轴连接驱动电机120的驱动轴,输出轴连接行走轮11,减速器121为L型行星减速器,减速器121的输出轴与输入轴垂直布置,相对设置的行走轮11所对应的驱动电机120平行布置,底座10的左右两侧设置有与驱动电机120一一对应的电机驱动器122,电机驱动器122与所对应的驱动电机120设置在同一侧,电机驱动器122与驱动电机120垂直相连,继电器13和接线端子14布置在底座10的中央,底座10外部做防雨处理。
继续参照图1和图2,本发明可以对变电站进行巡视,并将各项标记抄录和智能分析,可在雨雪冰冻、雷雨天气等特巡,承担事故处理的前期查勘等工作,有效降低人工巡检劳动强度,降低变电站运维成本,提高巡检作业和管理的自动化和智能化水平,为智能变电站和无人值守变电站提供创新型的技术检测手段和全方位的安全保障,且四个行走轮皆为驱动轮,显著提高了机器人的跃障性能和环境适应能力,可工作于室内外不同工况。
上述仅为本发明的一个具体实施方式,但本发明的设计构思并不局限于此,凡利用此构思对本发明进行非实质性的改动,均应属于侵犯本发明保护范围的行为。
- 一种巡检机器人的驱动机构及变电站巡检机器人
- 一种轨道巡检机器人驱动机构及其巡检机器人