农机安全控制方法及装置、计算机可读存储介质
文献发布时间:2023-06-19 19:23:34
技术领域
本发明涉及农机控制技术领域。
背景技术
如今的农机可以半自动驾驶,可以自动保持直线行驶作业,转弯和掉头还需要人工操作。驾驶农机的司机可能会由于注意力不集中,未能及时操作农机转弯或掉头,导致农机行驶过了位置再转弯或掉头,这样农机就会开出田埂外,甚至没有操作转弯或掉头导致农机直接越过田埂冲出地块,造成安全事故。
发明内容
有鉴于此,本发明提供农机安全控制方法及装置、计算机可读存储介质,可提高农机作业过程中的安全性,防止农机开出田埂或冲撞障碍物。
为实现上述目的,本发明提供以下技术方案。
1、农机安全控制方法,识别农机行进方向前方的田埂或障碍物,测量农机与所述田埂或障碍物之间的距离,如所述距离小于预设的安全距离且农机未掉头或转弯的,则告警或停车。在驾驶员未操作掉头时告警或停车,防止农机驶出田埂或冲撞障碍物造成安全事故。
2、在技术方案1的基础上,安全距离根据农机当前行驶速度得出,农机当前行驶速度越大,安全距离越大。农机刹停距离与刹车前的行驶速度有关,因此预设的安全距离并非定值,而是与当前行驶速度相关的动态值,如此更准确和灵活,确保农机不会越过田埂或冲撞障碍物。
3、在技术方案1的基础上,通过雷达及机器视觉识别所述障碍物或田埂。雷达和机器视觉识别各有优劣,两者相结合可互补,提高各种场景下的识别准确率。
4、在技术方案1的基础上,农机直线行驶过程中,根据两次测量的所述距离的差值以及该两次测量间隔的时间计算得出农机的行驶速度,如该计算得出的行驶速度与农机在该段时间实际的平均行驶速度相差超过预设速差阈值,则告警或停车。农机处在某些位置时,可能会由于光线、地形起伏等原因导致对前方的田埂或障碍物的识别有较大误差或错误,在行驶过程中,农机的位置一直在变化,持续识别并根据识别结果计算农机的行驶速度,如计算的行驶速度和实际的行驶速度相差过大,则表明识别的田埂或障碍物的位置不准确,农机与之的距离也不准确,此时告警或停车,防止农机驶出田埂或冲撞障碍物造成安全事故。
5、在技术方案1的基础上,记录每次开始掉头或转弯时农机的位置,如下一次同向行驶至相应位置时未开始掉头或转弯,则告警或停车,所述相应位置指与上一次同向行驶过程中开始掉头或转弯时农机的位置平齐的位置。如地块是规则的,那么农机每次同向行驶时需要掉头或转弯的位置基本上是平齐的,下次同向行驶过程中到达相应位置后未开始掉头或转弯的,说明可能驾驶员此时注意力不集中,此时告警或停车,一来是提醒驾驶员,二来可防止农机驶出田埂或冲撞障碍物造成安全事故。如地块是不规则的,也可起到告警提示的作用。
6、在技术方案1的基础上,农机开始掉头时,根据农机此时的位置和农机的最小转弯半径规划本次掉头的路径,计算所规划的路径与所识别的田埂或障碍物之间的最小距离,根据农机的结构尺寸判断本次掉头过程中农机是否会碰撞障碍物或越过田埂,若是,则告警或停车。
7、计算机可读存储介质,其存储有计算机程序,所述计算机程序被执行时能够实现以上任一项技术方案所述的农机安全控制方法。
8、农机安全控制装置,包括计算机可读存储介质和处理器,所述计算机可读存储介质为技术方案7所述的计算机可读存储介质,处理器可执行其中存储的计算机程序。
附图说明
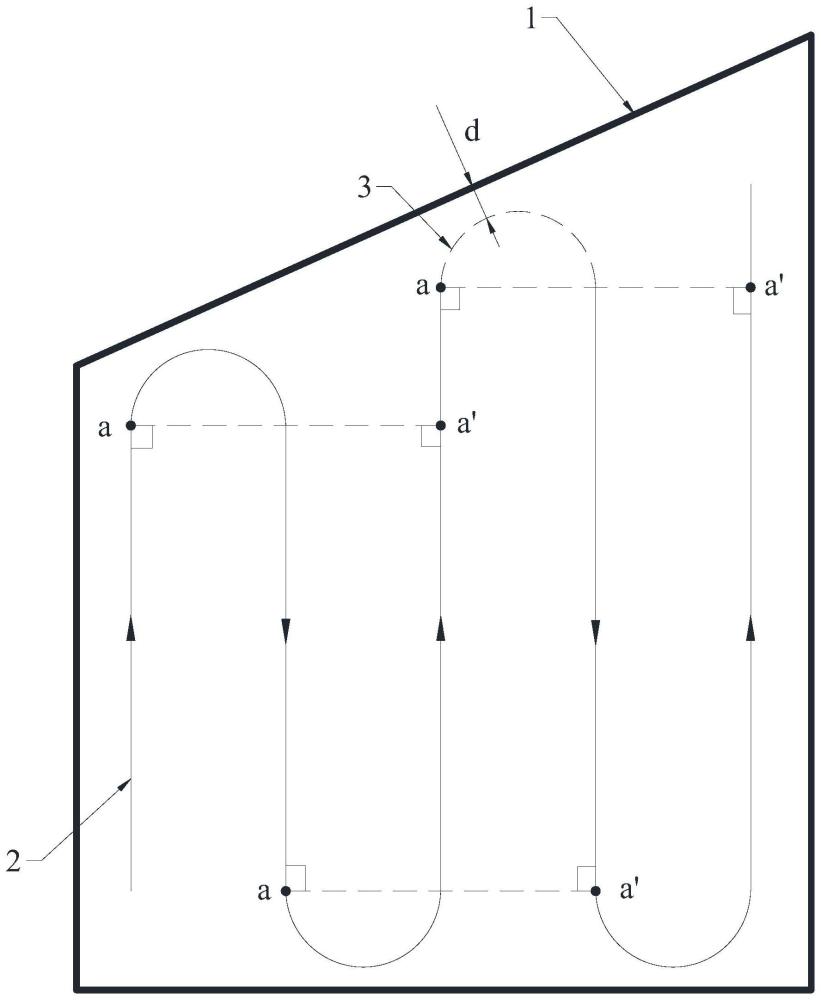
图1为农机在农田中作业是的路径示意图。
附图标记包括:
田埂1,农机行驶的路径2,规划的掉头路径3。
具体实施方式
以下结合具体实施例对本发明创造作详细说明。
以某个农田地块为例,其形状如图1所示,由四条田埂1围合而成。农机在作业时,行驶路径通常是多条平行、等间距的路线,图1中标号为2所指即为农机行驶的路径,在尽头掉头或转弯,来回行驶逐渐覆盖农田从而完成对该块农田的作业。
本实施例的农机安全控制方法,在农机作业时,识别农机行进方向前方的田埂1或障碍物,并测量农机与所识别的田埂1或障碍物之间的距离,如所述距离小于预设的安全距离,且农机未掉头或转弯的,就告警提示驾驶员或直接停车,也可以告警同时减速准备停车,避免农机因为驾驶员注意力不集中未及时操作掉头或转弯而驶出田埂1外或冲撞障碍物。需要说明的是,前面所说的农机行进方向前方并非单指正前方,而是识别前方一定角度范围内田埂或障碍物,这个角度范围有多大,取决于实际需求以及用于识别的设备的性能。本实施例中,通过雷达(例如毫米波雷达)及机器视觉两种融合的方式来识别,两者相结合可互补,提高各种场景下的识别准确率。就比如在驾驶机动车时常说的注视前方,留意前方路况,并不是只看正前方的意思,而是留意人类眼睛前方视角范围内的路况的意思。
预设的安全距离可以是定值,也可以动态值。本实施例中,预设的安全距离是根据农机当前行驶速度得出的,农机当前行驶速度越大,安全距离越大。行驶速度越大,刹停距离就越长,因此预设的安全距离也相应更大,确保农机不会越过田埂1或冲撞障碍物。
如图1所示,农机每次掉头或转弯过程中,都记录开始掉头或转弯时农机的位置(图1中标记为a),如下一次同向行驶至相应位置(图1中标记为a’)时未开始掉头或转弯,则告警或停车。所述相应位置指与上一次同向行驶过程中开始掉头或转弯时农机的位置平齐的位置,在图1中通过a与a’的位置可直观体现。如地块是规则的,那么农机每次同向行驶时需要掉头或转弯的位置基本上是平齐的,下次同向行驶过程中到达相应位置后未开始掉头或转弯的,说明可能驾驶员此时注意力不集中,此时告警或停车,一来是提醒驾驶员,二来可防止农机驶出田埂1或冲撞障碍物造成安全事故。如地块是不规则的,也可起到告警提示的作用。
农机因为挂载有作业器具,整体的结构尺寸是比较大的,农机在过于靠近田埂1或障碍物的情况掉头过程中可能会驶出田埂1外或冲撞障碍物,如图1所示,农机每次开始掉头时,现在以图1中农机的第三次掉头为例,根据农机此时的位置和农机的最小转弯半径规划本次掉头的路径,图1中标号3所指的虚线圆弧即为所述规划的掉头路径,计算所规划的路径与所识别的田埂1或障碍物之间的最小距离d,根据农机的结构尺寸判断本次掉头过程中农机是否会碰撞障碍物或越过田埂1,若是,则告警或停车。这样就能提前得知本次掉头是否安全,在可能不能安全掉头的情况下,及时停止掉头,防止掉头过程中农机驶出田埂1外或冲撞障碍物。
农机处在某些位置时,可能会由于光线、地形起伏等原因导致对前方的田埂或障碍物的识别有较大误差或错误,如依然以此为依据来实施前述的方法,则会发生误报,或未能及时告警和停车导致农机驶出田埂外或冲撞障碍物。农机直线行驶过程中,对行驶方向前方的田埂1和障碍物的识别是实时进行或定时进行的,在现有技术水平下,所谓的实时和定时没有本质区别,本质上都是间隔一定的时间实施一次,只是这个间隔时间大与小的问题,间隔时间足够小即可认为是实时的。无论上述识别是实时的还是定时的,在农机直线行驶过程中,根据前后两次测量的农机与识别得到的前方的田埂1或障碍物之间的距离,以及这两次测量间隔的时间,计算得出农机的行驶速度,然后比较计算得出的行驶速度与农机在这段时间内实际的平均行驶速度,如两者之间的差值超过预设的速差阈值,则表明所识别的田埂1或障碍物不准确,此时告警或停车,则可及时发现对田埂1和障碍物识别不准确的情况,避免因为识别不准确出现误报,或未能及时告警和停车导致农机驶出田埂1外或冲撞障碍物等情况。需要说明的是,前述前后两次测量并不一定是实际上时间上相邻的两次测量,而且也是随着农机行驶持续或不间断进行的,每次实施这个方法时选取的前后两次测量相距很短时间的话,就近似于对比的瞬时速度的计算值与实际值,同样以很短的间隔时间连续实施这个方法,则能取得近似于实时监控瞬时速度的计算值与实际值,能更及时和准确地发现识别异常。
本实施例所陈述的方法,可编制成计算机程序,存储在计算机可读存储介质中,由处理器执行该计算机程序即可实施所述方法。上述计算机可读存储介质和处理器作为农机安全控制装置的组成部分。
最后应当说明的是,以上实施例仅用以说明本发明创造的技术方案,而非对本发明创造保护范围的限制,尽管参照较佳实施例对本发明创造作了详细地说明,本领域的普通技术人员应当理解,可以对本发明创造的技术方案进行修改或者等同替换,而不脱离本发明创造技术方案的实质和范围。