一种可拆卸空间转动间隙主动铰链关节和一种机械臂
文献发布时间:2023-06-19 09:23:00
技术领域
本发明涉及机构铰链领域,特别是涉及一种可拆卸空间转动间隙主动铰链关节和一种机械臂。
背景技术
随着我国经济结构升级转型的深入和制造业用人成本的攀升,工业机器人的需求迅猛增长。机器人机构通过构件和铰链实现运动和力的传递,对精度、速度和可靠性等要求高。
然而,由于铰链间隙不可避免,机构运行时产生振动和磨损,特别是多个铰链间隙的耦合作用,导致其力学特性存在强烈的非线性特征,是影响机构运动与动力性能的重要因素之一。因此,迫切需要深入研究间隙铰链的动态力学特性,降低间隙对机构性能的不利影响,从而提升工业机器人等高端精密机构的性能。然而,由于间隙作用的复杂性,当前对铰链间隙动态力学特性的研究主要集中在理论建模与分析,较难通过实验对动力学特性进行测量与验证。主要原因有:1、因为机构铰链一般由轴承联接,由于制造、装配、磨损等原因导致的铰链间隙较小,铰链间隙的影响在实验系统中很难突显;2、当铰链存在间隙时,铰链存在轴向倾斜运动,成为空间转动铰链,而含间隙的空间转动铰链的设计是含铰链间隙实验系统中的难点问题。3、当铰链存在间隙时,特别是产生空间运动时,铰链轴与轴承之间的碰撞、冲击加剧,主动铰链的轴直接连接驱动,其碰撞冲击力对电机的影响巨大,远远大于被动铰链对电机的影响。因此,主动铰链中电机输出轴与铰链输入轴的处理问题成为难点问题。
发明内容
针对现有技术中存在的技术问题,本发明的目的之一是:提供一种可拆卸空间转动间隙主动铰链关节,能够在实验系统中突显铰链间隙的影响,为含间隙铰链机构的动态性能测试提供实验硬件条件,对提升机构的性能有潜在应用前景。
针对现有技术中存在的技术问题,本发明的目的之二是:提供一种机械臂,采用可拆卸空间转动间隙主动铰链关节,减少了对电机的碰撞冲击力,有效提升机械臂的性能,延长了机械臂的使用寿命。
为了达到上述目的,本发明采用如下技术方案:
一种可拆卸空间转动间隙主动铰链关节,包括轴承座和传动轴,传动轴穿设于轴承座内,传动轴和轴承座之间由内到外依次设有内轴套和外轴套,内轴套套接于传动轴,外轴套外侧壁抵接于轴承座内侧壁,外轴套内侧壁套接于内轴套,内轴套一端设有凸台,外轴套一端设有与凸台相匹配的凹槽,凸台抵接于凹槽。
进一步,轴承座一端设有轴承内端面透盖,轴承内端面透盖可拆卸连接于轴承座端面,外轴套抵接于轴承内端面透盖。
进一步,传动轴的侧壁设有限位部,限位部与轴承内端面透盖平行,内轴套抵接于限位部。
进一步,内轴套包括第一内轴套和第二内轴套,第一内轴套和第二内轴套之间设有内轴套套筒,第一内轴套、第二内轴套和内轴套套筒分别套接于传动轴,内轴套套筒两端分别抵接于第一内轴套和第二内轴套,外轴套包括第一外轴套和第二外轴套,第一外轴套和第二外轴套外侧壁分别抵接于轴承座内侧壁,第一外轴套内侧壁套接于第一内轴套,第二外轴套内侧壁套接于第二内轴套,第一外轴套和第二外轴套之间设有外轴套套筒,外轴套套筒套接于内轴套套筒外,外轴套套筒两端分别抵接于第一外轴套和第二外轴套。
进一步,传动轴为空心轴,空心轴内设有滑块和回转件,滑块两端分别设有第一突出部和第二突出部,空心轴一端内设有与第一突出部匹配的第一凹陷部,回转件一端设有与第二突出部匹配的第二凹陷部,滑块设于空心轴一端与回转件之间,第一突出部卡接于第一凹陷部,第二突出部卡接于第二凹陷部,回转件另一端设有减速器;减速器的输出端连接回转件,驱动回转件转动。
进一步,第一突出部垂直于第二突出部。
进一步,减速器为谐波齿轮减速器,谐波齿轮减速器包括刚轮、柔轮和波发生器,波发生器驱动柔轮转动;柔轮连接回转件另一端,驱动回转件转动。
进一步,柔轮一端端面设有突起,回转件另一端设有第三凹槽,突起卡接于第三凹槽。
进一步,突起和第三凹槽分别设有多个,多个突起均匀布置于柔轮一端端面,多个第三凹槽均匀布置于回转件另一端,多个突起和多个第三凹槽对应布置。
一种机械臂,包括可拆卸空间转动间隙主动铰链关节。
总的说来,本发明具有如下优点:
通过改变外轴套和内轴套的尺寸可以调整铰链间隙的大小。内轴套和外轴套组成的轴套组件为可置换的部分。当进行理想轴承实验时,在轴承座内使用交叉滚子轴承进行实验。因为高刚度的交叉滚子轴承内部游隙很小,为微米级,可认为其没有间隙,因此可以作为实验对照组。当进行含间隙机构实验时,则通过将交叉滚子轴承置换为所设计的轴套组件来调节间隙的大小进行实验,并将实验结果与对照组的数据作比较,可以突显铰链间隙的影响。
附图说明
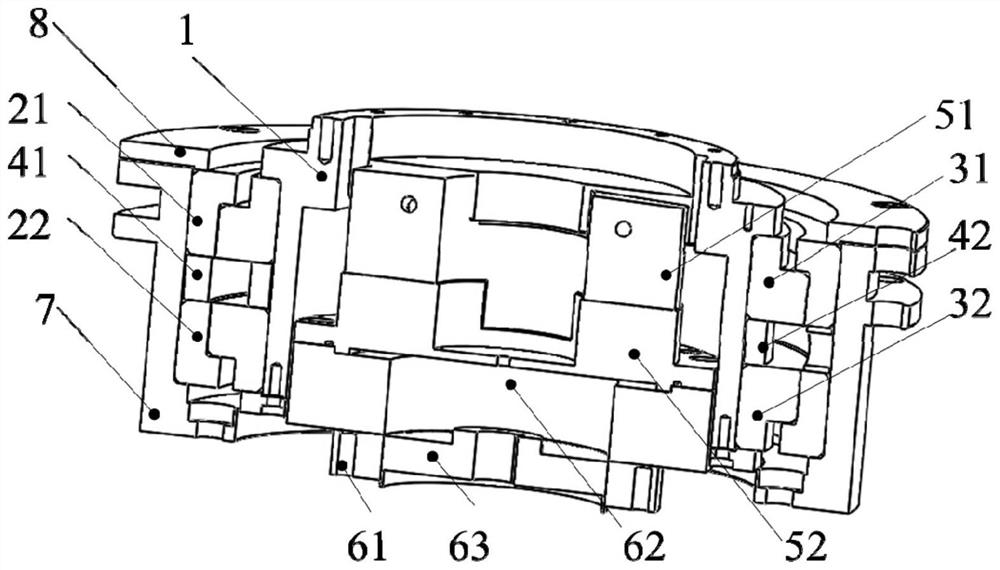
图1为可拆卸空间转动间隙主动铰链关节的结构示意图;
图2为空心轴和轴套组件的结构示意图;
图3为空心轴的立体结构示意图;
图4为轴承座的立体结构示意图;
图5为内轴套套筒的立体结构示意图;
图6为第一内轴套或第二内轴套的立体结构示意图;
图7为外轴套套筒的立体结构示意图;
图8为第一外轴套或第二外轴套的立体结构示意图;
图9为滑块和回转件的立体结构示意图;
图10为回转件的立体结构示意图;
图11为十字滑块的立体结构示意图;
图12为谐波齿轮减速器的结构示意图;
图13为波发生器的立体结构示意图;
图14为刚轮的立体结构示意图;
图15为柔轮的立体结构示意图。
附图标记说明:
1——空心轴、11——第一凹陷部;
21——第一外轴套、22——第二外轴套;
31——第一内轴套、32——第二内轴套;
41——外轴套套筒、42——内轴套套筒;
51——十字滑块、511——第一突出部、512——第二突出部、52——回转件、521——第二凹陷部、522——第三凹槽;
61——刚轮、62——柔轮、621——突起、63——波发生器;
7——轴承座;
8——轴承内端面透盖。
具体实施方式
下面来对本发明做进一步详细的说明。
实施例1
如图1~图4所示,一种可拆卸空间转动间隙主动铰链关节,包括轴承座7和传动轴,传动轴穿设于轴承座7内,传动轴和轴承座7之间由内到外依次设有内轴套和外轴套,内轴套套接于传动轴,外轴套外侧壁抵接于轴承座7内侧壁,外轴套内侧壁套接于内轴套,内轴套一端设有凸台,外轴套一端设有与凸台相匹配的凹槽,凸台抵接于凹槽。
具体地,通过凸台抵接于凹槽,防止内轴套和外轴套之间发生轴向移动。内轴套和内轴套套筒42分别与传动轴过盈配合,外轴套和外轴套套筒41分别与轴承座7过盈配合。通过改变外轴套和内轴套的尺寸可以调整铰链间隙的大小。内轴套和外轴套组成的轴套组件为可置换的部分。当进行理想轴承实验时,在轴承座7内使用交叉滚子轴承进行实验。因为高刚度的交叉滚子轴承内部游隙很小,为微米级,可认为其没有间隙,因此可以作为实验对照组。当进行含间隙机构实验时,则通过将交叉滚子轴承置换为所设计的轴套组件来调节间隙的大小进行实验,并将实验结果与对照组的数据作比较,可以突显铰链间隙的影响。
当外轴套和内轴套之间存在间隙时,通过外轴套和内轴套的倾斜交错,可以实现铰链的空间运动,从而实现空间铰链设计,解决了现有技术中含铰链间隙实验系统中空间转动铰链设计的难点问题。
轴承座7一端设有轴承内端面透盖8,轴承内端面透盖8可拆卸连接于轴承座7端面,外轴套抵接于轴承内端面透盖8。
轴承内端面透盖8能够限制外轴套的轴向移动。
传动轴的侧壁设有限位部,限位部与轴承内端面透盖8平行,内轴套抵接于限位部。
限位部抵接于内轴套,限制了内轴套的轴向移动。限位部和轴承内端面透盖8平行,共同限制了外轴套与内轴套的轴向松动。
如图5~图8所示,内轴套包括第一内轴套31和第二内轴套32,第一内轴套31和第二内轴套32之间设有内轴套套筒42,第一内轴套31、第二内轴套32和内轴套套筒42分别套接于传动轴,内轴套套筒42两端分别抵接于第一内轴套31和第二内轴套32,外轴套包括第一外轴套21和第二外轴套22,第一外轴套21和第二外轴套22外侧壁分别抵接于轴承座7内侧壁,第一外轴套21内侧壁套接于第一内轴套31,第二外轴套22内侧壁套接于第二内轴套32,第一外轴套21和第二外轴套22之间设有外轴套套筒41,外轴套套筒41套接于内轴套套筒42外,外轴套套筒41两端分别抵接于第一外轴套21和第二外轴套22。
具体地,第一外轴套21和第二外轴套22的外形和尺寸相同,第一内轴套31和第二内轴套32的外形和尺寸相同。第一内轴套31一端设有第一凸台,第一外轴套21一端设有与第一凸台相匹配的第一凹槽,第一凸台抵接于第一凹槽。第二内轴套32一端设有第二凸台,第二外轴套22一端设有与第二凸台相匹配的第二凹槽,第二凸台抵接于第二凹槽。
通过第一内轴套31、第二内轴套32、第一外轴套21和第二外轴套22的设置,可以应用于具有较大尺寸的铰链关节。
实施例2
本实施例与实施例1不同之处在于:
如图1、图9~图15所示,传动轴为空心轴1,空心轴1内设有滑块和回转件52,滑块两端分别设有第一突出部511和第二突出部512,空心轴1一端内设有与第一突出部511匹配的第一凹陷部11,回转件52一端设有与第二突出部512匹配的第二凹陷部521,滑块设于空心轴1一端与回转件52之间,第一突出部511卡接于第一凹陷部11,第二突出部512卡接于第二凹陷部521,回转件52另一端设有减速器;减速器的输出端连接回转件52,驱动回转件52转动。
具体地,空心轴1加工有第一凹陷部11作为联轴器限位槽,空心轴1作为从动半联轴器。滑块与回转件52作为主动半联轴器。空心轴1、滑块与回转件52三者共同构成了滑块联轴器。
现有技术中,当铰链关节存在间隙时,特别是产生空间运动时,铰链轴与轴承之间的碰撞、冲击加剧,主动铰链的轴直接连接驱动,其碰撞冲击力对电机的影响巨大,因此,主动铰链中电机输出轴与铰链输入轴的处理问题成为难点问题。
本发明实施例中,当减速器的输出端驱动回转件52转动时,由于滑块两端分别卡接于空心轴1与回转件52,因此也带动空心轴1转动。主动铰链关节通过滑块联轴器连接外部电机驱动,由于滑块联轴器取消了减速器传动轴向和径向的约束,只保留了周向约束来传递转矩,有效减少了主动铰链关节中空心轴1与轴承(或轴套组件)之间的碰撞和冲击,大大减少了对电机的碰撞冲击力,解决了主动铰链关节中电机输出轴与铰链关节输入轴的处理的难点问题。
第一突出部511垂直于第二突出部512。
具体地,滑块为圆环形十字滑块51,具有较强的扭矩。
减速器为谐波齿轮减速器,谐波齿轮减速器包括刚轮61、柔轮62和波发生器63,波发生器63驱动柔轮62转动;柔轮62连接回转件52另一端,驱动回转件52转动。
谐波齿轮减速器具有高精度、高承载力等优点,和普通减速器相比,由于使用的材料要少50%,其体积及重量至少减少1/3,进一步减少了对电机的碰撞冲击力。
柔轮62一端端面设有突起621,回转件52另一端设有第三凹槽522,突起621卡接于第三凹槽522。
通过突起621卡接于第三凹槽522,能够有效将柔轮62连接到回转件52,从而带动回转件52转动。
突起621和第三凹槽522分别设有多个,多个突起621均匀布置于柔轮62一端端面,多个第三凹槽522均匀布置于回转件52另一端,多个突起621和多个第三凹槽522对应布置。
通过设置多个突起621和多个第三凹槽522,柔轮62和回转件52的连接更加牢固可靠。
实施例3
一种机械臂,包括可拆卸空间转动间隙主动铰链关节。
由于可拆卸空间转动间隙主动铰链关节通过滑块联轴器连接外部电机驱动,取消了减速器传动轴向和径向的约束,只保留了周向约束来传递转矩,有效减少了主动铰链关节中空心轴1与轴承(或轴套组件)之间的碰撞和冲击,因此本发明实施例的机械臂大大减少了对电机的碰撞冲击力,有效提升机械臂的性能,延长了使用寿命。
上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。