空间球面两自由度并联机构
文献发布时间:2023-06-19 09:30:39
技术领域
本发明属于空间并联机构技术领域,特别涉及一种空间球面两自由度并联机构。
背景技术
球面机构作为一类特殊的空间机构,当机构运动时,其构件上所有点在一个与固定点保持不变距离的球面上运动。球面机构具有结构简单、工作空间大等优点。球面两自由度机构可以实现沿球面曲线的运动,在食品、药品的包装,工艺产品的加工,球形物体的检测等方面应用广泛。
现有的球面两自由度并联机构中,其输出运动都是机构上一点在球面上的移动,而很多情况需要末端连杆在球面上具有灵活的运动,且结构更简单的机构。
发明内容
针对以上情况,本发明提供了一种在运动过程中固定连杆和运动连杆始终关于中间平面保持对称,并且运动连杆具有以球心为转动中心的两转动自由度球面运动并联机构。
本发明采用的技术方案是,一种空间球面两自由度并联机构,其包括固定连杆、运动连杆以及设置在所述固定连杆与运动连杆之间的两个运动分支,所述两个运动分支包括第一运动分支和第二运动分支,且所述第一运动分支由第一转动副、第一连杆、第二转动副、第二连杆和第三转动副构成RRR串联分支,所述第一连杆的第一端通过所述第一转动副与所述固定连杆的第一端相连,且所述第一连杆的第二端通过所述第二转动副与所述第二连杆的第一端相连,所述第二连杆的第二端通过所述第三转动副与所述运动连杆的第一端相连,且所述固定连杆、第一连杆以及第二连杆均呈弧形结构,所述固定连杆、第一连杆以及第二连杆所在平面的圆弧圆心在空间中均重合于一点,即第一球心,且所述第一转动副、第二转动副以及第三转动副的中心轴线均汇交于所述第一球心;所述第二运动分支由第四转动副、第三连杆、第一球副、第四连杆和第五转动副构成RSR串联分支,所述第三连杆的第一端通过所述第四转动副与所述固定连杆的第二端相连,且所述第三连杆的第二端通过所述第一球副与所述第四连杆的第一端相连,所述第四连杆的第二端通过所述第五转动副与所述运动连杆的第二端相连,且所述第四转动副中心轴线和所述第五转动副中心轴线相交于第一交点,且所述第一交点与所述第一球副转动中心的连线不过所述第一球心。
进一步地,所述第二转动副轴线与所述第一球副转动中心间的连线、所述第一球副转动中心与所述第一球心间的连线以及所述第一球心与所述第二转动副轴线间的连线构成中间平面,且机构运动过程中所述固定连杆与所述运动连杆始终关于所述中间平面对称。
优选地,所述第一球心为空间球面两自由度并联机构的转动中心。
优选地,所述固定连杆所在平面的圆弧圆心、第一连杆所在平面的圆弧圆心、第二连杆所在平面的圆弧圆心以及运动连杆所在平面内的圆弧圆心均重合于所述第一球心,且所述固定连杆所在平面的圆弧半径、第一连杆所在平面的圆弧半径、第二连杆所在平面的圆弧半径以及运动连杆所在平面内的圆弧半径相等。
优选地,所述运动连杆能以过所述转动中心且位于所述中间平面上的任意一条直线为轴线进行无伴随运动。
本发明的特点和有益效果是:
1、本发明提供的一种空间球面两自由度并联机构,包括固定连杆、运动连杆以及固定连杆与运动连杆之间的RRR分支和RSR分支,且RRR分支与RSR分支配合运动,实现运动连杆绕中间平面,且过第一球心的任意直线进行连续转动,且运动过程中,固定连杆和运动连杆始终关于中间平面对称。
2、本发明提供的一种空间球面两自由度并联机构,可以进行多个单元组合连接,用于实现更大运动范围的要求,在食品、药品的包装,工艺产品的加工,球形遮风罩等方面有很高的应用价值。
3.本发明提供的一种空间球面两自由度并联机构,末端连杆可以以过转动中心且位于中间平面上的任意一条直线为轴线进行无伴随运动,对于机构的控制及应用环节,带来极大便利。
4.本发明提供的一种空间球面两自由度并联机构,结构简单,在将多个单元进行连接后,可实现中心控制的远程运动。
附图说明
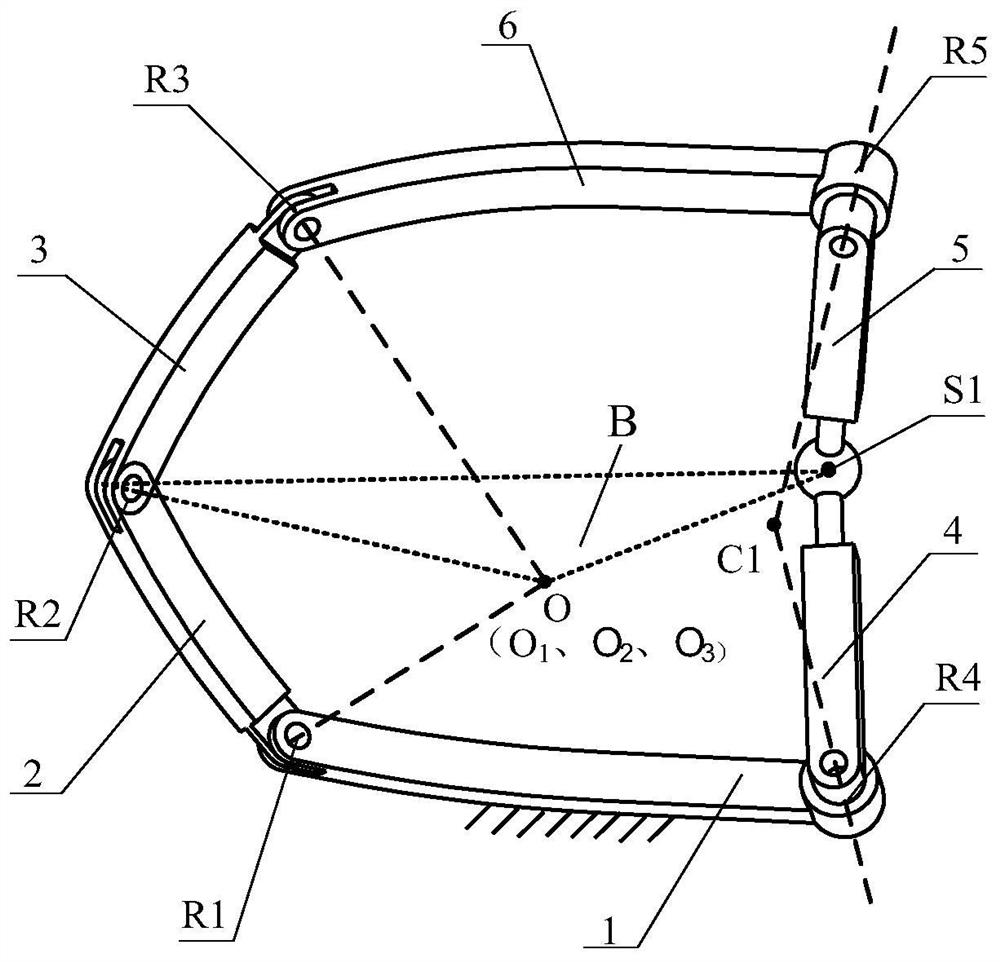
图1是本发明的实施例1结构示意图;
图2为本发明的固定连杆结构示意图;
图3为本发明的第一连杆结构示意图;
图4为本发明的第二连杆结构示意图;
图5为本发明的运动连杆结构示意图;
图6是本发明的实施例2结构示意图;
图7是本发明的实施例3结构示意图。
主要附图标记:
固定连杆1;第一连杆2;第二连杆3;第三连杆4;第四连杆5;运动连杆6;转动副R;球副S;第一交点C1;第二交点C2;第一球心O。
具体实施方式
为详尽本发明之技术内容、结构特征、所达成目的及功效,以下将结合说明书附图进行详细说明。
本发明提供一种空间球面两自由度并联机构,如图1所示,其包括固定连杆1、运动连杆6以及设置在固定连杆1与运动连杆6之间的两个运动分支,两个运动分支包括第一运动分支和第二运动分支,且第一运动分支由第一转动副R1、第一连杆2、第二转动副R3、第二连杆3和第三转动副R3构成RRR串联分支,第一连杆2的第一端通过第一转动副R1与固定连杆1的第一端相连,且第一连杆2的第二端通过第二转动副R2与第二连杆3的第一端相连,第二连杆3的第二端通过第三转动副R3与运动连杆6的第一端相连,且固定连杆1、第一连杆2以及第二连杆3均呈弧形结构,固定连杆1、第一连杆2以及第二连杆3所在平面的圆弧圆心在空间中均重合于一点,即第一球心O,且第一转动副R1、第二转动副R2以及第三转动副R3的中心轴线均汇交于第一球心O;第二运动分支由第四转动副R4、第三连杆4、第一球副S1、第四连杆5和第五转动副R5构成RSR串联分支,第三连杆4的第一端通过第四转动副R4与固定连杆1的第二端相连,且第三连杆4的第二端通过第一球副S1与第四连杆5的第一端相连,第四连杆5的第二端通过第五转动副R5与运动连杆6的第二端相连,且第四转动副R4中心轴线和第五转动副R5中心轴线相交于第一交点C1,且第一交点C1与第一球副S1转动中心的连线不过第一球心O。
进一步地,第二转动副R2轴线与第一球副S1转动中心间的连线、第一球副S1转动中心与第一球心O间的连线以及第一球心O与第二转动副R2轴线间的连线构成中间平面B,且机构运动过程中固定连杆1与运动连杆6始终关于中间平面B对称。
优选地,第一球心O为空间球面两自由度并联机构的转动中心。
如图2~图5所示,固定连杆1所在平面的圆弧圆心O
优选地,运动连杆6能过转动中心且位于中间平面B上的任意一条直线为轴线进行无伴随运动。
本发明的具体操作步骤如下:
实施例1
本发明的一种空间球面两自由度并联机构,如图1所示,其包括固定连杆1、运动连杆6以及设置在固定连杆1与运动连杆6之间的两个运动分支,两个运动分支包括第一运动分支和第二运动分支,且第一运动分支由第一转动副R1、第一连杆2、第二转动副R3、第二连杆3和第三转动副R3构成RRR串联分支,第一连杆2的第一端通过第一转动副R1与固定连杆1的第一端相连,且第一连杆2的第二端通过第二转动副R2与第二连杆3的第一端相连,第二连杆3的第二端通过第三转动副R3与运动连杆6的第一端相连,且固定连杆1、第一连杆2以及第二连杆3均呈弧形结构,固定连杆1、第一连杆2以及第二连杆3所在平面的圆弧圆心在空间中均重合于一点,即第一球心O,且第一转动副R1、第二转动副R2以及第三转动副R3的中心轴线均汇交于第一球心O;第二运动分支由第四转动副R4、第三连杆4、第一球副S1、第四连杆5和第五转动副R5构成RSR串联分支,第三连杆4的第一端通过第四转动副R4与固定连杆1的第二端相连,且第三连杆4的第二端通过第一球副S1与第四连杆5的第一端相连,第四连杆5的第二端通过第五转动副R5与运动连杆6的第二端相连,且第四转动副R4中心轴线垂直于运动连杆6的第一侧面,第五转动副R5中心轴线垂直于固定连杆1的第一侧面,第四转动副R4中心轴线和第五转动副R5中心轴线相交于第一交点C1,且第一交点C1与第一球副S1转动中心的连线不过第一球心O。
本发明是将与固定连杆相连接的第一连杆2和第三连杆4作为机构输入连杆,即驱动连杆;运动连杆6作为末端连杆,即机构输出连杆,末端连杆始终在球面上进行运动。在驱动连杆发生运动以后,第二连杆3、运动连杆6、第四连杆5一起随着驱动连杆发生运动,最终末端连杆可以以过第一球心O且位于中间平面上的任意一条直线为轴线进行无伴随运动,发生沿着球面方向运动。
实施例2
本发明的一种空间球面两自由度并联机构,如图6所示,其包括固定连杆1、运动连杆6以及设置在固定连杆1与运动连杆6之间的两个运动分支,两个运动分支包括第一运动分支和第二运动分支,且第一运动分支由第一转动副R1、第一连杆2、第二转动副R3、第二连杆3和第三转动副R3构成RRR串联分支,第一连杆2的第一端通过第一转动副R1与固定连杆1的第一端相连,且第一连杆2的第二端通过第二转动副R2与第二连杆3的第一端相连,第二连杆3的第二端通过第三转动副R3与运动连杆6的第一端相连,且固定连杆1、第一连杆2以及第二连杆3均呈弧形结构,固定连杆1、第一连杆2以及第二连杆3所在平面的圆弧圆心在空间中均重合于一点,即第一球心O,且第一转动副R1、第二转动副R2以及第三转动副R3的中心轴线均汇交于第一球心O;第二运动分支由第四转动副R4、第三连杆4、第一球副S1、第四连杆5和第五转动副R5构成RSR串联分支,第三连杆4的第一端通过第四转动副R4与固定连杆1的第二端相连,且第三连杆4的第二端通过第一球副S1与第四连杆5的第一端相连,第四连杆5的第二端通过第五转动副R5与运动连杆6的第二端相连,且第四转动副R4中心轴线垂直于运动连杆6的第一端面,第五转动副R5中心轴线垂直于固定连杆1的第一端面,且第四转动副R4中心轴线和第五转动副R5中心轴线相交于第二交点C2,且第二交点C2与第一球副S1转动中心的连线不过第一球心O。运动过程中,第四转动副R4和第五转动副R5可能平行,但是过第二球副S2的转动中心与第四转动副R4或者第五转动副R5平行的直线不通过第一球心O。
本发明是将与固定连杆相连接的第一连杆2和第三连杆4作为机构输入连杆,即驱动连杆;运动连杆6作为末端连杆,即机构输出连杆,末端连杆始终在球面上进行运动。在驱动连杆发生运动以后,第二连杆3、运动连杆6、第四连杆5一起随着驱动连杆发生运动,最终末端连杆可以以过第一球心O且位于中间平面上的任意一条直线为轴线进行无伴随运动,发生沿着球面方向运动。
实施例3
本发明的一种空间球面两自由度并联机构组件,如图7所示,可以由两个或多个空间球面两自由度并联机构单元组合,其中将相邻的两个并联机构单元中,按照运动输出方向分为第一级机构单元和第二级机构单元,第一级机构单元Ⅰ包括固定连杆1、运动连杆6以及设置在固定连杆1与运动连杆6之间的两个运动分支,两个运动分支包括第一运动分支和第二运动分支,且第一运动分支由第一转动副R1、第一连杆2、第二转动副R3、第二连杆3和第三转动副R3构成RRR串联分支,第一连杆2的第一端通过第一转动副R1与固定连杆1的第一端相连,且第一连杆2的第二端通过第二转动副R2与第二连杆3的第一端相连,第二连杆3的第二端通过第三转动副R3与运动连杆6的第一端相连,固定连杆1、第一连杆2以及第二连杆3所在平面的圆弧圆心在空间中均重合于一点,即第一球心O,第二运动分支由第四转动副R4、第三连杆4、第一球副S1、第四连杆5和第五转动副R5构成RSR串联分支,第三连杆4的第一端通过第四转动副R4与固定连杆1的第二端相连,且第三连杆4的第二端通过第一球副S1与第四连杆5的第一端相连,第四连杆5的第二端通过第五转动副R5与运动连杆6的第二端相连;同时第二级机构单元Ⅱ的第一连杆2通过第一转动副R1与第一级机构单元运动连杆6的第一端连接,第二级机构单元Ⅱ的第三连杆4通过第四转动副R4与第一级机构单元Ⅰ运动连杆6的第二端连接,且第一级机构单元Ⅰ的第三转动副R3与第二级机构单元Ⅱ的第一转动副R1之间采用齿轮啮合驱动,且传动比为1,第一级机构单元Ⅰ的第五转动副R5与第二级机构单元Ⅱ的第四转动副R4之间采用齿轮啮合驱动,且传动比为1;相同的第二级机构单元Ⅱ与第三级机构单元Ⅲ之间的连接方式与第一级机构单元Ⅰ与第二级机构单元Ⅱ之间的连接方式完全相同。
优选地,第一级机构单元Ⅰ的第三转动副R3与第二级机构单元Ⅱ的第一转动副R1之间亦可以采用皮带传动,第一级机构单元Ⅰ的第五转动副R5与第二级机构单元Ⅱ的第四转动副R4之间亦可以采用皮带传动。
本发明将相邻并联机构单元通过共用运动连杆6将第一级机构单元Ⅰ、第二级机构单元Ⅱ以及第三级机构单元Ⅲ连接组合在一起,在机构运动过程中将第一连杆2和第三连杆4作为机构输入连杆,即驱动连杆,第一连杆2和第三连杆4分别通过第二连杆3和第四连杆5使得运动连杆6的姿态发生变化,而第一级机构单元Ⅰ的第三转动副R3、第五转动副R5分别与第二级机构单元Ⅱ的第一转动副R1、第四转动副R4采用齿轮啮合驱动,进而将第一级机构单元Ⅰ的运动传递至第二级机构单元Ⅱ,并依次传递至第三级机构单元Ⅲ上,进而使得第三级机构单元Ⅲ上的运动连杆6,满足大行程、大空间的运动要求。
以上所述的实施例仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。