绳索驱动大运动范围柔性仿生球窝关节
文献发布时间:2023-06-19 09:30:39
所属技术领域
本发明涉及机器人技术领域,特别是涉及一种机械球窝关节。
背景技术
人体的肩关节为三自由度球窝式关节,具有结构紧凑、运动范围大等优点。由于制造技术和驱动方法上的制约,机器人多为串联的单自由度关节,并联机构虽然可以模仿三自由度关节的运动方式,但是运动范围一般较小,结构也不够紧凑。
发明内容
为了克服传统关节结构的缺点,本发明模拟人体肩关节的生物结构,设计了一种带柔性的球窝式仿生关节。该球窝关节采用绳索驱动,搭配柔性的机械结构,具有运动范围大、结构紧凑的特点。
本发明所采用的技术方案是:仿照人体球窝关节结构,为了增大关节的运动空间,将球窝设计成半球面,为了完全限制球头的移动自由度,模拟韧带对球头的包裹,加入球面剪叉机构对球头进行位置限制。球面剪叉机构连杆分为内连杆和外连杆两种,它们之间交错连接,即内连杆只与外连杆相连,反之同理。两个相邻连杆的转动副采用螺栓加套筒的连接方式,球面剪叉机构可绕其球心的任意一轴展开和收缩。球头上对称设置两根偏置杆,球窝上对称设置两条柔性滑轨,将两个四串联的球面剪叉机构并联在球窝关节上,球面剪叉机构一端连接偏置杆,另一端连接柔性滑块,滑块可沿着柔性滑槽滑动,滑槽与滑块间安装弹簧,为关节提供柔性。
本发明设计了一种展开式的绳索驱动结构,该驱动结构布置在关节内部,而球面剪叉机构和球头之间存在一个球窝壁宽度的空间,将绳索驱动结构布置在此空间内。可展开机构可沿着球窝内的驱动滑槽绕球心滑动,同时驱动滑槽顶部固定一个驱动滑槽盖,可展开机构最外面的一级展开滑块左右两侧各有一个滑轮,滑轮可沿着槽内的轨道滑动,滑轮和滑槽盖共同限制了可展开机构的运动路径。在滑轮和滑槽盖之间放置弹簧,弹簧可沿着驱动滑槽方向伸缩,且一直保持着压缩状态,由于弹簧的存在,只有当可展开机构受向上的拉力时,机构整体才会沿滑槽滑出,当可展开机构不受力时,弹簧将机构推至底部,机构整体将完全收缩于滑槽内。整个关节由四个绳索驱动结构并联控制,实现三自由度的偏转。
可展开机构包含一级展开滑块和二级展开滑块,一级展开滑块与球窝上的驱动滑槽配合,内部的二级展开滑块两侧通过一个短圆柱销固连两个滑轮,可沿着一级展开结构内的滑槽滑动;一级、二级展开滑块之间放置一根弹簧;二级展开滑块穿过弹簧中心,使得弹簧可沿着其展开方向伸缩;在二级展开滑块沿着一级展开滑块内部滑动时,弹簧始终保持压缩状态。由于弹簧的存在,只有当二级展开滑块受到绳索向上的拉力时,两个滑块才发生相对滑动;当不受力时,二级展开滑块将完全收缩在一级展开滑块内。一级展开滑块底部的两个滑轮通过一个长圆柱销固定在两侧的滑轮槽内,二级展开滑块底部设计限位凹槽,当机构完全收缩时,限位凹槽恰好卡在圆柱销上,实现完全收缩状态时的限位。球窝内的滑槽底部开一个凹槽,槽内插入一个长圆柱销,绳索从可展开机构内伸出后,绕过该圆柱销再伸出球窝,使得绳索末端的伸出点固定,防止其随可展开机构的滑动而改变。
绳索顶端缠绕驱动杆上的槽轮,另一端通过可展开机构内部从底部伸出球窝,与驱动器相连,二级展开滑块的顶部出口比内部空腔细,其大小可以通过一根绳索,在内部空腔一侧的绳索上打一个绳结,绳结宽度大于出口宽度,小于空腔宽度。当绳索受力向上拉出时,绳结卡在二级展开滑块的出口,带动二级展开滑块滑动,二级展开滑块再带动一级展开滑块绕球窝驱动滑槽滑动,实现了绳索带动整个结构的展开运动。当绳索受力向下拉出时,绳结可沿着空腔滑动,整个机构将完全收缩在驱动滑槽内,绳索可以一直收缩至极限位置。可展开机构的长短两个圆柱销还用来限制绳索相对球窝的径向位置,绳索通过二级展开滑块内部先后绕过短圆柱销和长圆柱销,最后再绕过球窝驱动滑槽底部的圆柱销伸出。在整个结构的伸缩过程中,圆柱销使得绳索不与各个零件发生任何干涉。
与现有技术相比,本发明的有益效果是,关节运动空间可达绕垂直轴偏转60°的锥面范围内,即可进行120°的大范围偏转,同时关节结构紧凑、尺寸小。此外,绳索驱动克服了电机自重对机器人性能的影响,电动机安装在机械臂末端的机架上,通过驱动绳索取代传统机器人的转动关节,有效地减轻了手臂自重,降低了转动惯量,提高了快速响应能力,使得机器人具有了更加灵活的性能,同时较低的自重也使得人机交互更加安全。由于电机和控制器都不再安装在机械臂上,所以它们避免了工作时受到外界因素对其自身造成的干扰和损坏,此外绳索驱动机构易于拆卸,维护和组装,方便对机器人进行运输和携带。
附图说明
下面结合附图和实施例对本发明进一步说明。
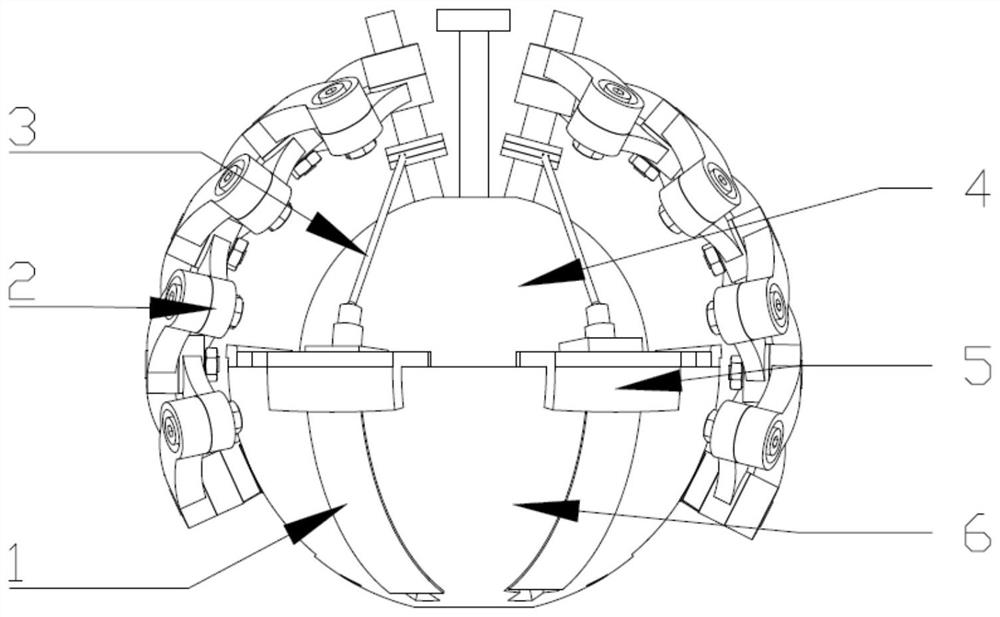
图1为本发明的整体示意图。
图2为球窝的俯视图。
图3为可展开机构内部结构示意图
图4为可展开机构与球窝的连接示意图。
图5为球面剪叉机构示意图。
其中,上述附图包括以下附图标记:
1、可展开机构;11、一级展开滑块;12、二级展开滑块;13、滑轮;14、弹簧;2、球面剪叉机构;21、柔性滑块;22、内短杆;23、外长杆;24、内长杆;25、外短杆;3、绳索;4、球头;5、滑槽盖;6、球窝;61、柔性滑槽;62、驱动滑槽。
具体实施方式
在图1中,可展开机构1,两个球面剪叉机构2,绳索3,球头4,滑槽盖5和球窝6共同构成整个球窝关节。绳索3一端连接球头3上的偏置驱动杆,穿过可展开机构1,从驱动滑槽62底部伸出,绳索3另一端连接驱动器,通过控制4根绳索带动球头4在球窝6内运动。
图2为球窝示意图,球窝上有6条滑轨,2条连接球面剪叉机构的柔性滑槽61,4条连接可展开机构的驱动滑槽62。
图3为可展开机构示意图,一级展开滑块11两侧通过圆柱销安装两个滑轮13,二级展开滑块12可沿着一级展开滑块11内部的空腔滑动。
图4为可展开机构与球窝的连接方式示意图,可展开机构1整体安装在驱动滑槽62内,通过两侧的滑轮13进行滑动,两根压缩弹簧14布置在可展开机构1与滑槽盖5之间。球面剪叉机构与球窝连接方式与之同理,不同之处是柔性滑块21上下两侧均安装弹簧。
图5为球面剪叉机构示意图。柔性滑块21可沿着柔性滑槽61滑动,柔性滑块22与内短杆22和外短杆25内部有一套筒,通过螺栓固连,三者可绕套筒自由转动,三组外长杆23和内长杆24通过螺栓套筒交错相连,顶部再各连接一根内短杆22和外短杆25,组成整个球面剪叉机构2,各个内短杆22、外短杆25、外长杆23、内长杆24结构均相同。球面剪叉机构2顶部的内短杆22和外短杆25同时连接球头4上的偏置驱动杆,整个机构可绕着球窝关节球心伸展和收缩,允许球头4在球窝6内部实现三自由度转动,但限制了球头4在其余三个自由度上的移动。