用于容器加工设备的模块化机器人系统
文献发布时间:2023-06-19 10:58:46
技术领域
本发明涉及一种用于容器加工设备的模块化机器人系统和一种用于模块化机器人系统的方法。
背景技术
机器人系统通常被用于容器加工设备中,以执行许多不同种类的任务,例如,在容器处理机处进行维护和/或维修工作。例如,任务可以是为容器处理机的输送带提供润滑剂。
DE 100 64 217 A1公开了一种包装线,其具有用于运送待包装产品的输送部件和可相对于输送部件移动的处理部件。
在WO 2009/146899 A1中公开了一种可多向移动的车辆,其包括移动车辆和配置在其上的机器人臂。为了实现独立的移动性,由车载控制系统控制的轮子配置在车辆处。
这里不利的是,鉴于承载力、范围、工具等的多样化的任务,限制了已知机器人系统的应用,因此机器人系统并没有被充分地物尽其用。
DE 10 2015 216 272 A1公开了一种具有机器人平台和机器人工作头的模块化机器人套件,其可以经由机器人适配器以模块化的方式互连,以在多任务环境中灵活地使用它们。
这里不利的是,在执行相应的任务时不需要平台本身,因此没有物尽其用。此外,在执行任务时,平台可能导致工作头相对于容器处理机的定位受到限制。
发明内容
因此,本发明的目的在于提供一种用于容器加工设备的模块化机器人系统,其可以更好地被物尽其用,并且在执行任务上受到的限制较少。
为了实现该目的,本发明提供了一种具有方案1的特征的用于容器加工设备的模块化机器人系统。在从属方案中陈述了本发明的有利的实施方式。
通过将移动平台和/或机器人单元设计为使得机器人单元可以选择性地连接至移动平台,以将机器人单元分别在容器加工设备中运送并且将机器人单元定位用于执行相应的任务,机器人单元中的一者可以根据任务灵活地与移动平台组合,然后被定位在容器加工设备的工作区域中。此外,被定位的机器人单元之后可以与移动平台分开地执行任务,使得移动平台可以在此期间用于机器人单元中的另一者。因此,模块化机器人系统可以被更好地物尽其用。
容器加工设备可以包括经由一个或多个运输机互连的多个容器处理机。容器处理机可以被理解为用于处理用于包装饮料的容器的机器。容器处理机可以包括容器制造机、冲洗器、检查装置、贴标机、用于将饮料包装到容器中的灌装器、包装机和/或码垛机。用于机器人单元的机器人安装座可以配置在容器处理机处。由此,机器人单元可以牢固地定位在与移动平台分开的容器处理机处。
容器可以被设置用于容纳流体产品(诸如饮料、食品、药剂制品、医疗产品、清洁剂、喷雾剂和/或身体护理产品)。优选地,容器可以指饮料容器。饮料可以指矿泉水、软饮料、果汁和/或啤酒。食品可以指诸如饮料、醋、食用油和/或类似物的产品。优选地,可以指将液体或糊状产品在其中从制造商运送至消费者的容器。
容器可以被设置用于将流体产品包装到其中并为它们设置封盖。容器可以是塑料瓶、玻璃瓶、罐和/或管。塑料瓶尤其可以是PET、PEN、HD-PE或PP瓶。容器同样可以是可生物降解的容器,其主要成分包括诸如甘蔗、小麦或甜玉米的可再生资源。
移动平台可以包括框架,在该框架上配置支撑于地板的机架。该框架可以选择性地连接至机器人单元中的一者。可以想到,框架被设计为类似于壳体。支撑于地板的机架可以包括多个轮子,至少一个轮子被设计为被驱动和/或可转向的。作为驱动器,支撑于地板的机架可以包括优选地被设计为可控制的电动马达。例如,该电动马达可以是伺服马达。也可以想到,支撑于地板的机架包括转向驱动器,以使至少一个轮子转向。为了供电,移动平台可以包括可充电电池和/或电气接口。
机器人单元分别可以包括具有至少一个可控制的关节的一个机器人臂和/或用于移动工具或工具保持夹具的行进单元(travel unit)。该工具可以被设计为例如用于抓取物体(例如容器)的抓具。也可以想到,工具包括喷嘴等以施加例如清洁介质或润滑剂。工具保持夹具可以被设计为用其容纳不同类型的工具。优选地,机器人臂或行进单元可以被设计为在空间中三维地移动工具。然而,也可以想到二维或一维的移动。可以想到,至少一个机器人单元包括用于供电的可充电电池。机器人单元可以是协同工作和/或协作工作的机器人单元。
可以将机器人系统设计为使得至少一个机器人单元在工作区域(特别是在容器处理机的工作区域)处独立地连接能源和/或介质供应部。由此,机器人系统本身可以在没有操作人员在应用场所的情况下建立能源和/或介质供应。该工作区域特别地可以是机器人单元的应用场所。为此有利的是,将至少一个插销插座连接配置在被定位的机器人单元的作用区域中。插销插座连接被设计为使得其是自动地通过机器人单元的定位、更改操作和/或更换或通过致动插销插座连接来实现的。为此,使用标准化的插销插座连接是有利的,特别地,该插销插座连接允许所有类型的机器人单元与容器处理机的任意组合。
该移动平台可以包括机器人安装座,以选择性地拾取机器人单元中的一者并将其定位在容器处理机处用于执行任务。这允许用移动平台分别以精确的位置和/或以牢固的方式容纳机器人单元。例如,机器人安装座可以是具有定位元件的板,该定位元件配置在上述框架处,以分别容纳机器人单元中的一者。可以想到,机器人单元分别包括可移除地连接至机器人安装座的支架。支架可以被设计为使得相应的机器人单元稳定地站立在支架的接触区域和/或接触脚上,而不受外部的支撑。
移动平台和机器人单元可以分别设计有单独的控制单元,使得可以自主地使用移动平台和机器人单元。由此,当一个机器人单元处理任务时,可以使用移动平台用于运送另一机器人单元。控制单元相应地可以是例如单独的机器控制器(特别是相应地具有微处理器)、存储单元、数据接口、传感器输入端、驱动器输出端、致动器等、输入单元和/或输出单元(诸如显示器)。可以想到,控制单元被设计为具有数据接口以相互交换数据。
移动平台可以被设计为自导航。由此,移动平台可以以独立于上级控制中心的方式工作。“自导航”这里可以指移动平台处理工作区域和/或至少一个导航传感器的数据,使得移动平台可以在工作区域内自主地移动。“工作区域的数据”这里例如可以指容器加工设备的容器处理机的配置的平面图和/或移动平台的路径。
模块化机器人系统可以包括固定平台,固定平台被设计为在工作场所处定位和/或容纳机器人单元中的一者。由此,机器人单元可以特别容易且精确地被定位在例如容器处理机处。此外,可以在固定平台处执行任务,从而通过在此期间运送其它机器人单元中的一者来使移动平台能够物尽其用。固定平台可以被设计为类似于桌子,特别地具有用于将其支撑于地板的底部框架,以及具有用于拾取机器人单元的机器人安装座。
移动平台可以被设计为在工作场所拾取、运送和/或定位固定平台,特别地与由固定平台拾取的机器人单元一起拾取、运送和/或定位固定平台。由此,移动平台既可以用于相应的机器人单元的运送,又可以用于固定平台的运送。可以想到,移动平台包括升降单元,以在运送期间在具有或没有被拾取的机器人单元的情况下提升固定平台,和/或降低固定平台以将其定位在工作场所处。升降单元可以包括用于固定平台和/或机器人单元的可升降的安装座。也可以想到,移动平台包括升降单元,以用于运送和/或在定位期间升降机器人单元中的一者。
移动机器人系统可以包括配件挂车,配件挂车可以联接至移动平台,特别地用于拾取工具、设定零件、清洁单元、润滑系统、润滑剂、原料、助剂、操作材料、测试装备、备件和/或维修部件。由此,由于可以在具有或没有配件挂车的情况下选择性地执行任务,因此可以更加灵活地使用移动机器人系统。此外,因而可以以简单的方式来扩展移动平台的运送能力。可联接的配件挂车可以包括支撑于地板上的单独的机架和/或一个或多个配件隔室。可以想到,配件隔室被设计为抽屉、搁板和/或箱式隔室。移动平台和配件挂车可以经由可移除的联接装置彼此连接。也可以想到,利用控制单元来控制联接装置,使得配件车辆选择性地从移动平台上移除或与移动平台连接。
移动平台、固定平台和/或至少一个机器人单元可以包括保护部件。由此可以更好地保护操作人员免受伤害。可以想到,保护部件包括机械锁定元件、光幕、3D检测传感器、光栅和/或紧急停止开关。3D检测传感器这里例如可以指激光扫描仪,其检测机器人单元的保护范围并且如果操作人员进入该保护范围则停用机器人单元。
模块化机器人系统可以包括用于机器人单元的料箱,料箱被设计为可以利用移动平台选择性地或顺序地从料箱取出机器人单元。由此,可以灵活地设置机器人单元以用于与移动平台的连接。可以想到,料箱包括用于机器人单元的输送部件,输送部件被设计为使得其将被选择用于与移动平台连接的机器人单元运送至转运点。例如,料箱可以包括作为输送部件的旋转平台和/或输送带。料箱可以被设计为使得移动平台在任务已经完成后将机器人单元中的一者返回至该料箱。
可以想到,至少在一个工作场所处配置可以经由电气接口或无线接口(airinterface)与至少一个机器人单元连接的至少一个传感器单元和/或一个致动器单元。由此,至少一个机器人单元可以在执行任务期间例如与设置在容器处理机处的传感器单元和/或致动器单元协作。例如,传感器单元可以是轴编码器或相机,或者致动器单元可以是输送部件的驱动器。
至少在一个工作场所处可以为机器人单元和/或移动平台配置能源和/或介质供应单元。由此,机器人单元和/或移动平台的可充电电池也可以在相应的工作场所被充电。
模块化机器人系统可以包括上级控制中心,以特别是为了执行任务而控制移动平台和机器人单元。由此,可以协调移动平台和机器人单元的使用。控制中心可以是例如操作人员将任务输入到其中的计算机系统。可以想到,控制中心被设计为控制多个移动平台。
移动平台、固定平台、配件挂车和/或机器人单元可以均被设计为具有识别部件。由此,不会无意识地将这些单元混淆。识别部件可以是例如字符、条形码和/或RFID识别元件。
此外,为了实现该目的,本发明提供了一种具有方案14的特征的用于模块化机器人系统的方法。在从属方案中陈述了本发明的有利的实施方式。
通过移动平台拾取、运送和定位一个机器人单元以执行一项任务,以及移动平台拾取、运送和定位另一机器人单元以执行另一任务,可以根据任务将机器人单元灵活地与移动平台组合,然后将机器人单元定位在容器加工设备的工作区域中。此外,一个机器人单元之后可以以独立于移动平台的方式执行任务,使得在此期间移动平台可以用于另一机器人单元。因此,模块化机器人系统可以被更好地物尽其用。
可以利用特别是根据方案1至13中的一项的上述模块化机器人系统来执行该方法。此外,该方法可以类似地包括上述关于特别是根据方案1至13中的一项的模块化机器人系统所述的特征。
可以想到,一个机器人单元执行一项任务,同时移动平台拾取、运送和/或定位另一机器人单元用于执行另一任务。
机器人单元可以被从料箱中取出和/或至少定位在固定平台上的一个工作场所处或具有固定平台的一个工作场所处。通过从料箱中取出,可以特别容易地设置不同类型的机器人单元。可以想到,适合于一项任务的机器人单元通过料箱被设置在转运点处,并在该处拾取机器人单元。在此过程中,可以利用输送部件在料箱内移动机器人单元,直到合适的机器人单元定位在转运点处。通过定位在固定平台上或利用固定平台定位,可以特别容易且精确地将机器人单元定位在例如容器处理机处。可以想到,固定平台与一个机器人单元一起被拾取、运送和定位用于执行任务。
附图说明
下面将参照附图中所示的实施方式更详细地说明本发明的其它特征和优点。在附图中:
图1A至图1D以侧视图示出了模块化机器人系统的实施方式,其具有移动平台、不同类型的机器人单元和用于机器人单元的料箱;
图2以侧视图示出了正在执行任务的图1A至图1D的机器人单元;
图3A至图3D以侧视图示出了图1A至图1D的一个机器人单元和移动平台以及固定平台;以及
图4A至图4B以侧视图示出了图1A至图1D的一个机器人单元和移动平台以及可联接的配件挂车。
具体实施方式
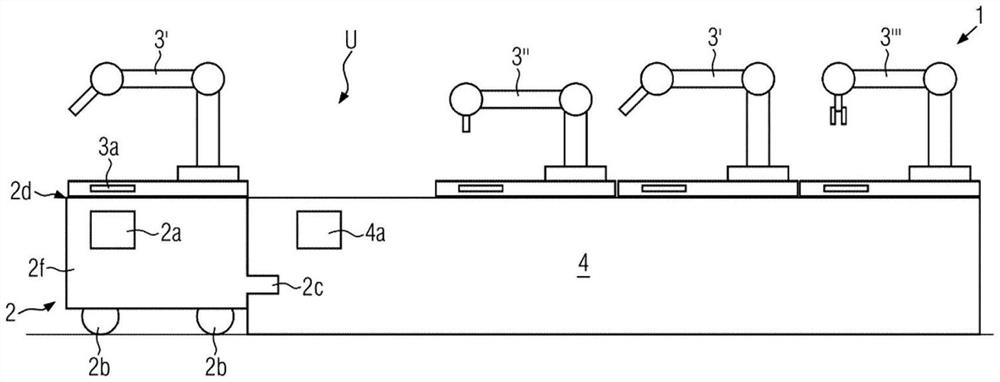
在图1A至图1D中以侧视图示出了模块化机器人系统1的实施方式,其具有移动平台2、不同类型的机器人单元3'、3”、3”'和用于机器人单元3'、3”、3”'的料箱4。
可以看到具有框架2f和机架2b的移动平台2,机架2b支撑在地板上以在这里未更详细示出的容器加工设备的工作区域中移动。在该实施方式中,支撑在地板上的机架2b包括多个轮子,多个轮子分别配置在框架2f的角部处。所有轮子都被设计成可驱动和可转向的,以允许移动平台2具有尽可能多的运动自由度。然而,也可以想到,仅三个或多于三个轮子配置在移动平台2处。还可以想到,仅一部分轮子被驱动和/或是可转向的。
此外,可以看到联接装置2c,平台可以通过联接装置2c牢固地连接至料箱4或下文描述的配件挂车5。
此外,移动平台2包括单独的控制单元2a以控制移动平台2(特别是机架2b)。由此,移动平台2被设计为自导航的,从而其可以在容器加工设备的工作区域内独立地移动。为此,例如将工作区域的平面图存储在控制单元2a中,和/或控制单元2a与这里未更详细示出的定位传感器协作。
此外,移动平台2包括机器人安装座2d,机器人安装座2d这里例如被设计为平坦的安装面以容纳机器人单元3'、3”、3”'中的一者并将其定位在这里未更详细示出的容器处理机处用于执行任务。
例如,机器人单元3'、3”、3”'这里被设计为具有一个臂部和两个关节的关节臂机器人。仅作为示例,它们通过不同的工具进行区别。然而,可以想到,机器人单元3'、3”、3”'表示适合于容器加工设备的任意不同类型。
机器人单元3'、3”、3”'分别包括单独的控制单元3a,以便移动平台2及其控制单元2a自主地使用机器人单元3'、3”、3”'。
还可以看到料箱4,可以借助移动平台2选择性地将机器人单元3'、3”、3”'从料箱取出和/或返回至料箱。料箱4还包括单独的控制单元4a,例如以控制用于放下的机器人单元3'、3”、3”'的输送部件。由此,可以选择性地将机器人单元运送到转运点U或从转运点U运走。
在图1A中,可以看到第一类型的机器人单元3'是由机器人安装座拾取的。现在,机器人单元3'在对应于图1B的转运点U处被转运至料箱4,使得移动平台2不再承载任何机器人单元。在图1C中,转而可以看到,料箱4已经移动了机器人单元3'、3”、3”',使得第二类型的机器人单元3”设置在转运点处。如图1D所示,移动平台拾取机器人单元3”,随后将机器人单元3”在容器加工设备中运送,并将机器人单元3”定位以完成相应的任务。
现在将参照图2进行更详细地描述。在图2中以侧视图示出了图1A至图1D的正在执行任务的机器人单元3”。可以看到,图1D的移动平台2已经将机器人单元3'定位在为此目的而设置的容器处理机7的区域处。移动平台2本身不需要执行任务,因此,在图2中不再示出移动平台2。移动平台2可以返回至例如料箱并拾取用于执行另一任务的另一机器人单元3'、3”、3”',并将其定位在另一容器处理机处。
容器处理机7这里仅以局部示出,并且包括需要定期润滑的用于容器的输送带7c。这是由机器人单元3”执行的。为此,机器人单元3”经由接口3b、7d连接至容器处理机7。更详细地,机器人单元的控制单元3a经由接口3b、7d连接至容器处理机7的控制单元7a。然而,也可以想到无线接口。因此,机器人单元3”可以经由控制命令向容器处理机7发出指令,例如,以在润滑期间使输送带7c(致动器单元)连续地向前移动。
为此,机器人单元3”的关节臂3e进一步伸出,使得润滑剂喷嘴3d配置在输送带7c上方。因此,润滑剂喷嘴3d可以将润滑剂喷洒到输送带7c上。通过输送带7c的连续向前运动,接下来将均匀地喷洒所有区域。
此外,可以看到,容器处理机7包括用于机器人单元3”的能源供应单元7b,能源供应单元7b经由电源接口3c、7e连接至机器人单元3”。由此,可以直接或经由配置在其中的可充电电池间接地向机器人单元3”供能。
也可以看到,上级控制中心8控制移动平台2、机器人单元3'、3”、3”'。
在图3A至图3D中以侧视图示出了图1A至图1D的机器人单元3”和移动平台以及固定平台6。
可以看到固定平台6,其这里被设计为例如其上配置有机器人单元3”的桌子。根据图3A,固定平台6被定位在容器加工设备(这里未示出)中。对应于图3B,移动平台2现在移动到固定平台6下方的位置,并用升降单元2e将固定平台6与配置在其上的机器人单元3”一起提升高度H。由此,固定平台6不再接触地板B,从而固定平台6可以与机器人单元3”一起例如沿方向R被运送至图3C所示的位置P。随后,升降单元2e在位置P处再次缩回,从而固定平台6与机器人单元3”一起被牢固地定位。
如图3D所示,移动平台2现在被驱动从固定平台6下方离开,因此移动平台2可以自由地拾取其它机器人单元3'、3”、3”'。现在,机器人单元3”可以在位置P处以独立于移动平台2的方式执行任务。
在图4A至图4B中,以侧视图示出了图1A至图1D的机器人单元3”和移动平台以及可联接的配件挂车5。
可以看到,移动平台2和配件挂车4分别包括可移除的联接装置3c、5a的一半,例如可以利用移动平台2的控制单元2a控制该联接装置。由此,移动平台2可以被驱动至配件挂车5并根据需要联接或移除。也可以想到,设置有多个不同的配件挂车5,以便根据任务与移动平台2一起携带适合于该任务的配件。例如,配件挂车5是用于向机器人单元3”供应润滑剂的润滑系统。由此,例如在输送带7c的润滑期间,配件挂车5可以作为润滑剂供应部被携带。
也可以想到,图1A至图4所示的模块化机器人系统1还被开发为使得移动平台2、固定平台6和/或至少一个机器人单元3'、3”、3”'包括保护部件和/或识别部件。
通过将移动平台2和/或机器人单元3'、3”、3”'设计为使得机器人单元3'、3”、3”'可以选择性地连接至移动平台2,以将机器人单元3'、3”、3”'分别在容器加工设备中运送并且将机器人单元3'、3”、3”'定位用于执行相应的任务,机器人单元3'、3”、3”'中的一个可以根据任务灵活地与移动平台2组合,然后被定位在容器加工设备的工作区域中。此外,被定位的机器人单元3”之后可以与移动平台2分开地执行任务,使得移动平台2可以在此期间用于机器人单元3”、3”'中的另一个。因此,模块化机器人系统1可以被更好地物尽其用。
可以理解,参照示例性实施方式提及的特征不限于特征的这些组合,还可以单独地或以任何其它组合来实现。
- 用于容器加工设备的模块化机器人系统
- 用于容纳饮料基础材料的容器、包括自动饮料制备设备和此类容器的饮料制备系统、用于在此类饮料制备系统中使用的自动饮料制备设备以及使用此类饮料制备系统来制备饮料的方法