机械臂工件坐标系的非接触式标定装置及方法
文献发布时间:2023-06-19 11:00:24
技术领域
本发明涉及工业机器人标定的技术领域,特指一种机械臂工件坐标系的非接触式标定装置及方法。
背景技术
机器人自发明以来,经过多年的发展,其技术取得许多重大的成就,机器人精度的标定问题是其中不可或缺的一部分,目前许多机器人虽然具有较高的重复定位精度,但它们的绝对定位精度相对来说却不高,这就使其成为了限制机器人行业发展的瓶颈之一。为了提高机器人的绝对定位精度,机器人标定技术应运而生。
国内外的学者对机器人标定技术从建模、测量方法等方面进行了广泛深入的研究,其中机械臂工件坐标系标定对于机器人实际应用有着很实际的作用。工业机器人的工件坐标系标定有许多种方法,如常见的三点标定法,即用机械臂末端工具中心点去依次触碰地面上三个点,并分别记录下来。但在有些应用中,末端工具不能直接触碰地面以免发生损坏末端工具的情况。因此,不能直接标定机器人的工件坐标系,这就产生了很多利用不同测量手段及工具对机械臂工件坐标系进行标定的方法,如利用校准物体进行标定,利用多个机器人握手操作进行标定等,上述方法都需要安装相应末端器或者使用多个机器人,操作较为复杂;利用校准物体进行标定,对物体本身有很高要求,精度有待考察。
发明内容
本发明的目的在于克服现有技术的缺陷,提供一种机械臂工件坐标系的非接触式标定装置及方法,解决现有的三点标定法无法应用于机械臂末端工具不能直接触碰地面的情况、多机器人标定存在的操作复杂和校准物体标定的精度有待考察等的问题。
实现上述目的的技术方案是:
本发明提供了一种机械臂工件坐标系的非接触式标定方法,所述机械臂的末端安装有工具,所述标定方法包括如下步骤:
提供三个激光笔,将三个激光笔安装在所述机械臂上并让三个激光笔发出的激光束相交于一点以形成激光交汇点;
调节所述激光笔的姿态以使得所述激光交汇点位于所述工具的下方;
提供摄像机,将所述摄像机安装于所述机械臂上,并让所述摄像机朝着所述工具的末端及所述激光交汇点设置;
利用所述激光交汇点于工件表面标定出标定坐标系,在标定过程中,利用所述摄像机对所述工具的末端及所述激光交汇点进行拍摄形成视频数据并予以显示;以及
根据所述激光交汇点距所述工具的末端的距离,将所述标定坐标系转换成工件坐标系,从而完成工件坐标系的非接触式标定。
本发明的标定方法借助激光束的高精度及非接触的标定的优点,利用激光束的激光交汇点代替机械臂末端工具,解决机械臂末端工具不能直接接触地面或工件的问题,进而通过激光交汇点利用三点法标定出标定坐标系,由于激光交汇点位于工具的下方,根据激光交汇点与工具的距离能够对标定坐标系进行转换以得出工件坐标系。在整个标定过程中,摄像机对工具的末端及激光交汇点进行全程拍摄记录,能够实现远程观察标定过程。本发明的标定方法操作简单,对机器人操作要求低,标定方法不涉及机器人内部编码器读数和关节角数值,避免了人为操作误差和机器人本身误差带来的标定精度影响,同时利用激光测量精度高的优点,标定结果精度高。
本发明机械臂工件坐标系的非接触式标定方法的进一步改进在于,在利用所述激光交汇点进行标定时,通过如下步骤调节所述激光交汇点的位置使得所述激光交汇点位于所述工件表面:
控制所述机械臂向上移动,并根据所述摄像机拍摄的视频数据判断所述工件表面上的三个激光点之间的间距是否变大;
若是,则控制所述机械臂向下移动,直至所述激光交汇点位于所述工件表面;
若否,则控制所述机械臂继续向上移动,直至所述激光交汇点位于所述工件表面。
本发明机械臂工件坐标系的非接触式标定方法的进一步改进在于,在安装激光笔时,提供一激光笔固定块,将三个激光笔安装于所述激光笔固定块上;
将所述激光笔固定块呈倾斜状的安装于所述机械臂上,并让所述激光交汇点位于所述工具所在的平面上,且设于所述工具的末端的下方;
沿着所述激光笔固定块的倾斜面转动调节所述激光笔固定块的位置以使得所述激光交汇点位于所述工具的轴线上。
本发明机械臂工件坐标系的非接触式标定方法的进一步改进在于,还包括:
提供激光笔支架,所述激光笔支架上设有第一弧形调节槽和位于所述第一弧形调节槽下方的第一连接孔,将所述激光笔支架安装于所述机械臂上且所述激光笔支架与所述机械臂的安装面相垂直;
提供激光笔固定架,所述激光笔固定架上设有第二弧形调节槽和位于所述第二弧形调节槽下方的第二连接孔,将所述激光笔固定架通过穿过所述第一弧形调节槽和所述第一连接孔的紧固件连接在所述激光笔支架上,且所述激光笔固定架与所述激光笔支架相垂直;
将所述激光笔固定块置于所述激光笔固定架上,通过穿过所述第二弧形调节槽和所述第二连接孔的连接件连接在所述激光笔固定架上;
通过沿所述第一弧形调节槽调节对应紧固件的位置,使得所述激光笔固定架绕着穿过所述第一连接孔的紧固件进行转动调节,进而带着所述激光笔固定块进行转动调节,从而实现调节所述激光交汇点位于所述工具所在的平面上并设于工具的末端的下方;
通过沿所述第二弧形调节槽调节对应的连接件的位置,使得所述激光笔固定块绕着穿过所述第二连接孔的连接件进行转动调节,从而实现调节所述激光交汇点位于所述工具的轴线上。
本发明机械臂工件坐标系的非接触式标定方法的进一步改进在于,在安装摄像机时,将所述摄像机呈倾斜状的且可转动调节的安装于所述机械臂上,进而通过转动调节所述摄像机以使得所述摄像机的视角范围覆盖所述工具的末端及所述激光交汇点。
本发明机械臂工件坐标系的非接触式标定方法的进一步改进在于,还包括:
提供安装支架,将所述安装支架安装于所述机械臂上并靠近所述工具设置;
提供摄像机支架,将所述摄像机支架以可在竖向面内进行转动调节的方式连接于所述安装支架;
提供摄像机固定架,将所述摄像机固定架以可在纵向面内进行转动调节的方式连接于所述摄像机支架;
将所述摄像机安装在所述摄像机固定架上,通过转动调节所述摄像机固定架使得所述摄像机在纵向面内进行转动调节,从而实现调节所述摄像机的视角范围位于所述工具的末端及所述激光交汇点的高度处,通过转动调节所述摄像机支架使得所述摄像机在竖向面内进行转动调节,从而实现调节所述摄像机的视角范围覆盖所述工具的末端及所述激光交汇点。
本发明还提供了一种机械臂工件坐标系的非接触式标定装置,所述机械臂的末端安装有工具,所述标定装置包括:
以姿态可调节的方式安装于所述机械臂上的三个激光笔,三个激光笔发出的激光束相交于一点从而形成激光交汇点,通过调节所述激光笔的姿态可使得所述激光交汇点位于所述工具的下方;以及
安装于所述机械臂上的摄像机,所述摄像机朝着所述工具的末端及所述激光交汇点设置,通过所述摄像机拍摄所述工具的末端及所述激光交汇点得到视频数据,从而利用所述视频数据和所述激光交汇点可于工件表面标定出标定坐标系,进而转换得到工件坐标系。
本发明机械臂工件坐标系的非接触式标定装置的进一步改进在于,还包括一激光笔固定块,所述激光笔固定块呈倾斜状的安装于所述机械臂上;
三个激光笔安装于所述激光笔固定块上。
本发明机械臂工件坐标系的非接触式标定装置的进一步改进在于,还包括激光笔支架和激光笔固定架;
所述激光笔支架安装于所述机械臂上且所述激光笔支架与所述机械臂的安装面相垂直,所述激光笔支架上设有第一弧形调节槽和位于所述第一弧形调节槽下方的第一连接孔;
所述激光笔固定架通过穿过所述第一弧形调节槽和所述第一连接孔的紧固件连接在所述激光笔支架上,且所述激光笔固定架与所述激光笔支架相垂直,所述激光笔固定架上设有第二弧形调节槽和位于所述第二弧形调节槽下方的第二连接孔;
所述激光笔固定块置于所述激光笔固定架上,通过穿过所述第二弧形调节槽和所述第二连接孔的连接件连接在所述激光笔固定架上;
通过沿所述第一弧形调节槽调节对应的紧固件的位置,可使得所述激光笔固定架绕着穿过所述第一连接孔的紧固件进行转动调节,进而带着所述激光笔固定块进行转动调节,从而实现调节所述激光交汇点位于所述工具所在平面上并设于所述工具的末端的下方;
通过沿所述第二弧形调节槽调节对应的连接件的位置,使得所述激光笔固定块绕着穿过所述第二连接孔的连接件进行转动调节,从而实现调节所述激光交汇点位于所述工具的轴线上。
本发明机械臂工件坐标系的非接触式标定装置的进一步改进在于,所述摄像机呈倾斜状的且可转动调节的安装在所述机械臂上,通过转动调节所述摄像机以使得所述摄像机的视角范围覆盖所述工具的末端及所述激光交汇点。
附图说明
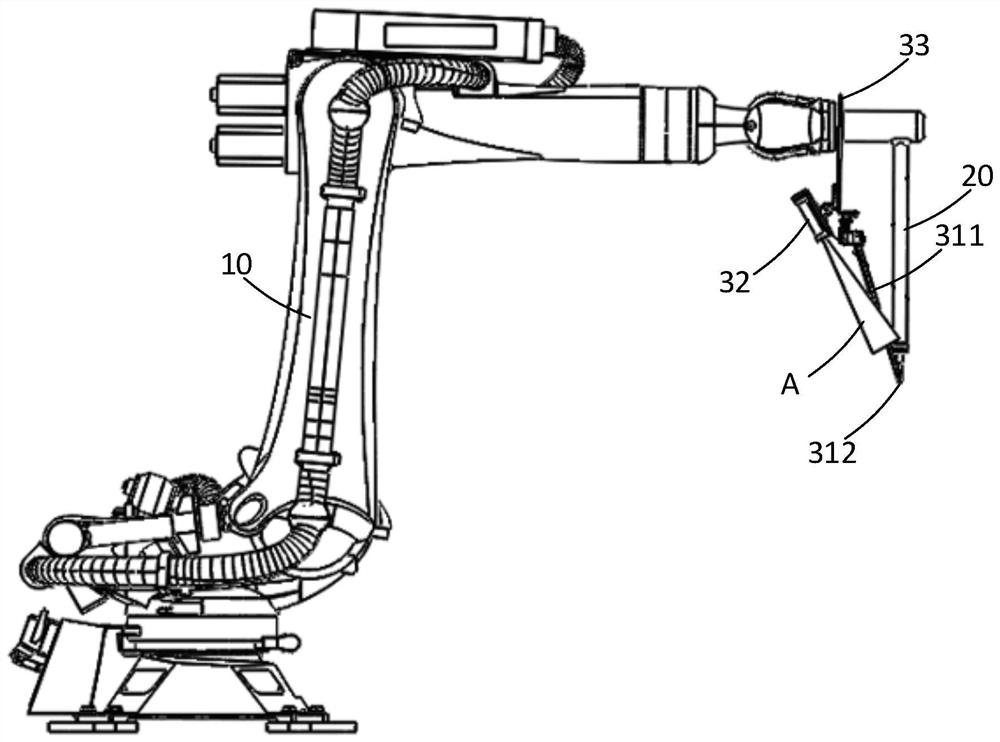
图1为本发明机械臂工件坐标系的非接触式标定装置安装于机械臂的结构示意图。
图2为本发明机械臂工件坐标系的非接触式标定装置省去摄像机后的放大示意图。
图3为本发明机械臂工件坐标系的非接触式标定装置省去激光笔后的放大示意图。
图4为本发明机械臂工件坐标系的非接触式标定装置中安装支架的侧视图。
图5为本发明机械臂工件坐标系的非接触式标定装置中激光笔固定块及激光束的结构示意图。
图6为本发明机械臂工件坐标系的非接触式标定装置中激光笔固定块的结构示意图。
图7为本发明机械臂工件坐标系的非接触式标定装置中激光笔固定块的轴测图。
图8为本发明机械臂工件坐标系的非接触式标定装置中激光笔固定架的主视图。
图9为本发明机械臂工件坐标系的非接触式标定装置中激光笔固定架的侧视图。
图10为本发明机械臂工件坐标系的非接触式标定装置中激光笔固定架的轴测图。
图11为本发明机械臂工件坐标系的非接触式标定装置中激光笔支架的主视图。
图12为本发明机械臂工件坐标系的非接触式标定装置中激光笔支架的俯视图。
图13为本发明机械臂工件坐标系的非接触式标定装置中激光笔支架的轴测图。
图14为本发明机械臂工件坐标系的非接触式标定装置中摄像机支架的轴测图。
图15为本发明机械臂工件坐标系的非接触式标定装置中摄像机支架的主视图。
图16为本发明机械臂工件坐标系的非接触式标定装置中摄像机固定架的轴测图。
图17为本发明机械臂工件坐标系的非接触式标定装置中摄像机固定架的主视图。
图18为本发明机械臂工件坐标系的非接触式标定装置的三个激光笔发出的激光束在工件表面可能出现的三种情况示意图。
图19为本发明机械臂工件坐标系的非接触式标定装置标定过程中各坐标系的示意图。
图20为本发明机械臂工件坐标系的非接触式标定方法的流程图。
具体实施方式
下面结合附图和具体实施例对本发明作进一步说明。
参阅图1,本发明提供了一种机械臂工件坐标系的非接触式标定装置及方法,使用激光笔和摄像机来实现坐标系的标定,标定操作简单,其中的激光笔安装在机械臂上可实现两个自由度的调节,摄像机安装在机械臂上也可实现两个自由度的调节,利用激光笔发出的激光束相交形成的激光交汇点代替机械臂末端的工具的中心点,利用三点法标定出坐标系,进而再进行从激光交汇点到工具中心点的坐标变换,得出工件坐标系。上述标定方法可有效避免标定过程中工具直接接触工件或地面,避免损坏工具,整个标定的过程中可通过摄像机远程观察。利用激光笔实现标定,具有标定结果精度高的特点。下面结合附图对本发明机械臂工件坐标系的非接触式标定装置及方法进行说明。
参阅图1,显示了本发明机械臂工件坐标系的非接触式标定装置安装于机械臂的结构示意图。参阅图2,显示了本发明机械臂工件坐标系的非接触式标定装置省去摄像机后的放大示意图。参阅图5,显示了本发明机械臂工件坐标系的非接触式标定装置中激光笔固定块及激光束的结构示意图。下面结合图1、图2和图5,对本发明机械臂工件坐标系的非接触式标定装置进行说明。
如图1、图2和图5所示,本发明的机械臂工件坐标系的非接触式标定装置包括三个激光笔31和摄像机32,在机械臂10的末端安装有工具 20,该工具20通常呈竖向状态设置;其中的三个激光笔31以姿态可调节的方式安装在机械臂10上,该三个激光笔31发出的激光束311相交于一点从而形成激光交汇点312,通过调节激光笔31的姿态可使得该激光交汇点312位于工具20的下方,较佳地,该激光交汇点312位于工具20的中心点的下方,激光交汇点312与工具20的中心点之间有一定的距离。摄像机32安装在机械臂20上,该摄像机32朝着工具20的末端及激光交汇点312设置,通过摄像机32拍摄工具20的末端及激光交汇点312得到视频数据,从而利用视频数据和激光交汇点312可于工件表面标定出标定坐标系,进而转换得到工件坐标系。
较佳地,可通过一显示装置播放摄像机32拍摄的视频数据,通过播放的视频数据可观察标定过程,在利用激光交汇点312进行坐标标定时,可采用三点法于工件表面标定出标定坐标系,该激光交汇点312位于工具 20的中心点的下方,该激光交汇点312与工具20的中心点之间相距一定距离,进而根据该距离可将标定坐标系转换成工件坐标系,从而完成了工件坐标系的非接触式标定。利用激光交汇点312来实现工件坐标系的标定,能够避免工具20与工件的直接接触,可避免工具20发生损坏。
在本发明的一种具体实施方式中,如图1、图5至图7所示,本发明的标定装置还包括一激光笔固定块343,该激光笔固定块343呈倾斜状的安装于机械臂10上,三个激光笔31安装在激光笔固定块343上。
又佳地,激光笔固定块343为一平面板。
进一步地,激光笔固定块343上设有安装槽,激光笔31对应的置于安装槽内,三个激光笔31发出的激光束311恰好汇聚于一点。激光笔固定块343呈倾斜状的安装在机械臂10上,该激光笔固定块343所在的平面与工具20所在的平面相交,通过调节激光笔固定块343的安装位置,能够让激光交汇点312恰好位于工具20的中心点的下方。沿着激光笔固定块343的倾斜面转动调节激光笔固定块343的位置以使得激光交汇点 312位于工具20的轴线上。
在本发明的一种具体实施方式中,如图1和图2所示,激光笔固定块 343通过激光笔支架341和激光笔固定架342可调节的安装在机械臂10 上,使得该激光交汇点312能够调节至工具20的下方。进一步地,如图 10所示,激光笔支架341安装于机械臂10上,该激光笔支架341与机械臂的安装面相垂直,激光笔支架341上设有第一弧形调节槽3411和位于第一弧形调节槽3411下方的第一连接孔3412,结合图8和图2所示,激光笔固定架342通过穿过第一弧形调节槽3411和第一连接孔3412的紧固件连接在激光笔支架341上,且该激光笔固定架342与激光笔支架341相垂直,该激光笔固定架342与工具20所在的平面相交但不垂直。在一较佳实施方式中,在图1所示的状态下,工具20的末端呈竖向设置,其位于竖向面内,机械臂10的安装面与该竖向面相平行,激光笔支架341与机械臂的安装面相垂直。
较佳地,如图8至图10所示,激光笔固定架342包括位于上部的固定部3423和位于下部的连接部3424,该连接部和固定部3423相平行设置且在不同的平面内,连接部3424和固定部3423之间垂直连接有连接段。其中的固定部3423用于与激光笔支架341连接,连接部3424用于与激光笔固定块343连接。在固定部3423的相对两侧设有通孔,连接该固定部3423和激光笔支架341时,让通孔与激光笔支架341上的第一弧形调节槽 3411和第一连接孔3412相对齐,在第一弧形调节槽3411和对应的通孔内穿设一紧固件,在第一连接孔3412和对应的通孔内穿设另一紧固件,通过两个紧固件将该固定部3423和激光笔支架341紧固连接,在紧固连接时,让位于第一弧形调节槽3411内的紧固件沿着第一弧形调节槽3411进行位置调节,进而使得激光笔固定架342绕着位于第一连接孔3412内的紧固件为轴进行转动调节,如此实现了一个自由度的调节,当激光笔固定块343带着激光笔安装在该激光笔固定架342上时,通过第一弧形调节槽 3411实现了激光笔31的前后旋转调节,也即激光笔31向着靠近或远离工具20所在的方向转动。
再进一步地,如图11至图13所示,激光笔支架341包括两个相对设置的纵向板3413和连接在两个纵向板3413顶部的呈水平状的水平板3414,该水平板3414用于连接在机械臂10上;第一弧形调节槽3411和第一连接孔3412设于纵向板3413上,在连接激光笔固定架342时,将激光笔固定架342的固定部3423置于两个纵向板3413之间,并让紧固件贯穿两个纵向板3413及激光笔固定架342,在调节好姿态后再紧固连接。
更进一步地,如图8至图10所示,激光笔固定架342上设有第二弧形调节槽3421和位于第二弧形调节槽3421下方的第二连接孔3422,激光笔固定块343置于该激光笔固定架342上,通过穿过第二弧形调节槽3421 和第二连接孔3422的连接件连接在激光笔固定架342上。如此,通过沿第一弧形调节槽3411调节对应的紧固件的位置,可使得激光笔固定架342 绕着穿过第一连接孔3412的紧固件进行转动调节,进而带着激光笔固定块343进行转动调节,从而实现了调节激光交汇点位于工具所在的平面上并设于工具的末端的下方;通过沿第二弧形调节槽3421调节对应的连接件的位置,使得激光笔固定块343绕着穿过第二连接孔3422的连接件进行转动调节,从而实现了调节激光交汇点位于工具的轴线上。
较佳地,第二弧形调节槽3421下方的第二连接孔3422设于激光笔固定架342的连接部3424上,该连接部3424为平面板。结合图6所示,激光笔固定块343贴设于连接部3424,进而通过连接件穿过对应的第二弧形调节槽3421和第二连接孔3422而实现连接。该第二弧形调节槽3421和第二连接孔3422为激光笔提供了另一个自由度调节,该激光笔可在连接部3424所在的斜向平面内进行左右旋转调节。
如图1和图3所示,安装支架33呈L型,包括第一安装部331和第二安装部332,第一安装部331和第二安装部332相垂直设置,第一安装部331呈水平状设置,第二安装部332呈竖向状设置,第二安装部332贴设于机械臂10的安装面并与该安装面固定连接。结合图9和图10所示,第一安装部331用于连接激光笔支架341,将激光笔支架341的水平板3414 贴设于第一安装部331并与第一安装部331紧固连接,激光笔支架341的纵向板3413垂直于第一安装部331和第二安装部332及机械臂10的安装面。
在本发明的一种具体实施方式中,如图1和图3所示,摄像机32呈倾斜状的且可转动调节的安装在机械臂10上,通过转动调节摄像机32以使得该摄像机32的视角范围A覆盖工具20的末端及激光交汇点312。该工具20的末端即为工具20的底部。
进一步地,摄像机32安装在安装支架33的第二安装部332上,摄像机32的镜头朝着斜下方设置。安装支架33靠近工具20设置,工具20安装在机械臂10的末端法兰上,结合图4所示,安装支架33顶部设有卡槽,通过该卡槽将安装支架33卡套在机械臂10的末端处,进而通过卡槽两侧的壁板与机械臂10紧固连接。
结合图14和图16所示,摄像机32通过摄像机支架35和摄像机固定架36安装在安装支架33的第二安装部332上,摄像机支架35可在第二安装部332的竖向面内进行转动调节,通过摄像机支架35和摄像机固定架36的转动调节,可实现调节摄像机32的视角范围A的位置,以让该视角范围A覆盖到工具20的末端及激光交汇点312。
在调节摄像机32的视角范围A时,先转动调节摄像机支架35让摄像机32的视角范围A对准工具20的末端,而后在转动调节摄像机固定架36,让摄像机32的视角范围A向下移动直至覆盖到工具20的末端与激光交汇点312。
如图14和图15所示,摄像机支架35呈L型,包括相互垂直设置的贴合板351和装配板352,贴合板351上设有安装孔3512和第一弧形长条孔3511,该第一弧形长条孔3511位于安装孔3512的下方,通过螺栓穿过对应的安装孔3512和第一弧形长条孔3511而将该贴合板351紧固连接在第二安装部331上,通过第一弧形长条孔3511为摄像机32提供在竖向面内的转动调节,具体地,让螺栓沿着第一弧形长条孔3511进行位置调节,使得贴合板351可绕着位于安装孔3512内的螺栓为轴进行转动调节,实现了摄像机32的一个自由度的调节。
如图16和图17所示,摄像机固定架36包括相对设置的一对耳板361 和垂直连接在一对耳板361底部的底板362,该底板362与摄像机32固定连接,一对耳板361上设有第二弧形长条孔3611和装配孔3612,装配孔 3612位于第二弧形长条孔3611的上方,结合图14所示,安装摄像机固定架36时,将一对耳板361卡套在装配板352上,进而通过连接螺栓穿过第二弧形长条孔3611和装配孔3612及装配板352而实现摄像机固定架36 和摄像机支架35的连接,通过第二弧形长条孔3611为摄像机32提供倾斜角度的转动调节,也即前后旋转调节,实现了摄像机32的另一个自由度的调节。
如图3所示,摄像机32的外侧套设有安装壳,摄像机固定架36与安装壳固定连接,进而实现了摄像机32的安装。
利用本发明的标定装置进行标定时,在标定的工件表面通常会有三个激光点,而不是激光交汇点312,如图18所示,在第一平面41和第三平面43上显示有三个激光点,激光交汇点312位于第二平面42上。此时需要调节机械臂10进行移动,让激光交汇点312位于工具表面,调节时,先向上移动机械臂10,接着判断在工件表面的激光点之间的距离变化,若激光点之间的距离变大,表明激光交汇点312位于工件表面的上方,需要向下移动调节机械臂10,直至激光交汇点312位于工件表面。若激光点之间的距离变小,表明激光交汇点312位于工件表面的下方,继续向上移动机械臂10,直至该激光交汇点312位于工件表面。之后可利用激光交汇点标定工件坐标系。
如图19所示,三点法标定坐标系是通过在工件表面设置是三个示教点来实现的,第一示教点51为原点,第二示教点52在X轴正方向上,第三示教点53与第二示教点52的连线平行于Y轴,且该第三示教点53位于Y轴的正方向区域内。移动机械臂10带着激光交汇点移动到第一示教点51处,接着移动至第二示教点52和第三示教点53处,从而得到了标定坐标系B的原点、X轴及Y轴,接着Z轴由右手定则确定。将激光交汇点的坐标系记为T
工具20的坐标系相对于机械臂的末端法兰的坐标系已标定,所以可得激光交汇点坐标系T
如上所述,激光交汇点坐标系T
在工件坐标系标定过程中,摄像机32始终对准工具末端与激光交汇点进行拍摄,实现了远程观察标定过程。
本发明还提供了一种机械臂工件坐标系的非接触式标定方法,下面对该标定方法进行说明。
如图20所示,本发明的标定方法包括如下步骤:
执行步骤S101,提供三个激光笔,将三个激光笔安装在机械臂上并让三个激光笔发出的激光束相交于一点以形成激光交汇点;接着执行步骤 S102;
执行步骤S102,调节激光笔的姿态以使得激光交汇点位于工具的下方;接着执行步骤S103;
执行步骤S103,提供摄像机,将摄像机安装于机械臂上,并让摄像机朝着工具的末端及激光交汇点设置;接着执行步骤S104;
执行步骤S104,利用激光交汇点于工件表面标定出标定坐标系,在标定过程中,利用摄像机对工具的末端及激光交汇点进行拍摄形成视频数据并予以显示;接着执行步骤S105;
执行步骤S105根据激光交汇点距工具的末端的距离,将标定坐标系转换成工件坐标系,从而完成工件坐标系的非接触式标定。
在本发明的一种具体实施方式中,在利用激光交汇点进行标定时,通过如下步骤调节激光交汇点的位置使得激光交汇点位于工件表面:
如图18所示,控制机械臂向上移动,并根据摄像机拍摄的视频数据判断工件表面上的三个激光点之间的间距是否变大;
若是,则控制机械臂向下移动,直至激光交汇点312位于工件表面;
若否,则控制机械臂继续向上移动,直至激光交汇点312位于工件表面。
在本发明的一种具体实施方式中,如图5和图6所示,在安装激光笔31时,提供一激光笔固定块343,将三个激光笔31安装于激光笔固定块343上;
结合图1和图2所示,将激光笔固定块343呈倾斜状的安装于机械臂10上,并让激光交汇点312位于工具20所在的竖向面上,且设于工具 20的末端的下方;
沿着激光笔固定块343的倾斜面转动调节激光笔固定块343的位置以使得激光交汇点312位于工具20的轴线上。
让激光交汇点312位于工具20的轴线上,利用激光交汇点312代替工具20的末端,实现非接触式的标定。
在本发明的一种具体实施方式中,还包括:
如图11至图13所示,提供激光笔支架341,激光笔支架341上设有第一弧形调节槽3411和位于第一弧形调节槽3411下方的第一连接孔3412,将激光笔支架341安装于机械臂10上且激光笔支架341与工具20所在的竖向面相垂直;
如图8至图10所示,提供激光笔固定架342,激光笔固定架342上设有第二弧形调节槽3421和位于第二弧形调节槽3421下方的第二连接孔 3422,将激光笔固定架341通过穿过第一弧形调节槽3421和第一连接孔 3422的紧固件连接在激光笔支架341上,且激光笔固定架342与激光笔支架341相垂直;
将激光笔固定块343置于激光笔固定架342上,通过穿过第二弧形调节槽3421和第二连接孔3422的连接件连接在激光笔固定架342上;
通过沿第一弧形调节槽3411调节对应紧固件的位置,使得激光笔固定架342绕着穿过第一连接孔3412的紧固件进行转动调节,进而带着激光笔固定块343进行转动调节,从而实现调节激光交汇点位于工具所在的竖向面上并设于工具的末端的下方;
通过沿第二弧形调节槽3421调节对应的连接件的位置,使得激光笔固定块343绕着穿过第二连接孔3422的连接件进行转动调节,从而实现调节激光交汇点位于工具的轴线上。
在本发明的一种具体实施方式中,如图1和图3所示,在安装摄像机32时,将摄像机32呈倾斜状的且可转动调节的安装于机械臂10上,进而通过转动调节摄像机32以使得摄像机32的视角范围A覆盖工具20 的末端及激光交汇点312。
在本发明的一种具体实施方式中,还包括:
如图1和图4所示,提供安装支架33,将安装支架33安装于机械臂 10上并靠近工具20设置;
结合图14和图15所示,提供摄像机支架35,将摄像机支架35以可在竖向面内进行转动调节的方式连接于安装支架33;
结合图16和图17所示,提供摄像机固定架36,将摄像机固定架36 以可在纵向面内进行转动调节的方式连接于摄像机支架35;
将摄像机32安装在摄像机固定架36上,通过转动调节摄像机固定架36使得摄像机32在纵向面内进行转动调节,从而实现调节摄像机32 的视角范围A位于工具的末端及激光交汇点的高度处,通过转动调节摄像机支架35使得摄像机32在竖向面内进行转动调节,从而实现调节摄像机的视角范围覆盖工具的末端及激光交汇点。具体地,让摄像机32的视角范围A覆盖工具20的末端及激光交汇点312,对激光标定的过程进行全程拍摄。
以上结合附图实施例对本发明进行了详细说明,本领域中普通技术人员可根据上述说明对本发明做出种种变化例。因而,实施例中的某些细节不应构成对本发明的限定,本发明将以所附权利要求书界定的范围作为本发明的保护范围。
- 机械臂工件坐标系的非接触式标定装置及方法
- 用于焊接机器人焊枪工具点及工件坐标系标定装置及方法