一种适用于配网带电作业机器人的导线夹持工具
文献发布时间:2023-06-19 11:03:41
技术领域
本发明涉及机器人技术领域,具体为一种适用于配网带电作业机器人的导线夹持工具。
背景技术
传统的配网带电作业中,操纵人员位于升降绝缘斗臂车上,利用绝缘杆进行双人带电作业来更换避雷器、绝缘子等设备。尽管近年来针对配网带电作业操作制订了一系列规范性技术标准和作业准则,但由于任务量大,危险系数高,环境恶劣,人员伤亡事故还是时有发生。为此,国内外开展了大量关于配网带电作业机器人的研发工作,希望替代人工进行带电作业。
在配网带电作业机器人进行接火、断引线、更换避雷器等常见配网作业时,需要夹持绝缘导线进行移动。绝缘导线多为直径超过10mm的铝芯线,弯曲刚度较大,常常给机械臂的导线夹持移动操作带来很大负载;一方面可以通过对机械臂的运动轨迹进行特别规划,来避免因负载过大导致的配网带电作业机器人自保护停止,这属于从软件算法上对机械臂进行力控规划,但由于涉及机械臂的动力学内容,算法实现相对复杂。
发明内容
本发明的目的在于提供一种适用于配网带电作业机器人的导线夹持工具,通过在夹爪的夹持槽中对称地设置多个随转轴承,当夹爪抓住导线做绕导线中心旋转的运动时,由于随转轴承的作用,夹爪可以自由绕导线的轴线转动而不产生扭转应力,减小了机械臂的关节负担,仅对导线进行弯曲作业,大大降低配网带电作业机器人夹持移动绝缘导线时的机械臂末端负载;同时遥操作端的力反馈装置上由大拇指和食指控制的开合机构能直接控制夹爪的开合,且夹爪和导线的反馈力能够反馈到操作人员端。操作人员根据反馈力来调整机械臂的运动,提高了遥操作的临场感,同时提高了作业的速度和成功率。
为实现上述目的,本发明提供如下技术方案:
一种适用于配网带电作业机器人的导线夹持工具,包括:
机械臂,所述机械臂上设置有两个夹爪;
夹持槽,所述夹持槽位于所述夹爪的中间部位,所述夹持槽为半圆槽结构;
多个随转轴承,所述多个随转轴承对称地设置于所述夹持槽的内壁。
优选地,所述随转轴承通过弹簧连接于所述夹持槽的内壁。
优选地,所述弹簧的底部设置有微型压力片,所述微型压力片用于检测弹簧的压力值。
优选地,所述导线夹持工具还包括:
遥操作端;
通信模块,所述通信模块用于将所述微型压力片检测到的压力值发送到所述遥操作端。
优选地,所述遥操作端上设置有工具控制夹爪,所述工具控制夹爪用于控制所述夹爪的开合程度,所述力反馈装置包括由大拇指和食指控制的开合机构。
与现有技术相比,本发明的有益效果是:
(1)本发明通过在夹爪的夹持槽中对称地设置多个随转轴承,当夹爪抓住导线做绕导线中心旋转的运动时,由于随转轴承的作用,夹爪可以自由绕导线的轴线转动而不产生扭转应力,减小了机械臂的关节负担,仅对导线进行弯曲作业,大大降低配网带电作业机器人夹持移动绝缘导线时的机械臂末端负载;
(2)本发明的力反馈装置上由大拇指和食指控制的开合机构能直接控制夹爪的开合,且夹爪和导线的反馈力能够反馈到操作人员端。操作人员根据反馈力来调整机械臂的运动,提高了遥操作的临场感,同时提高了作业的速度和成功率。
附图说明
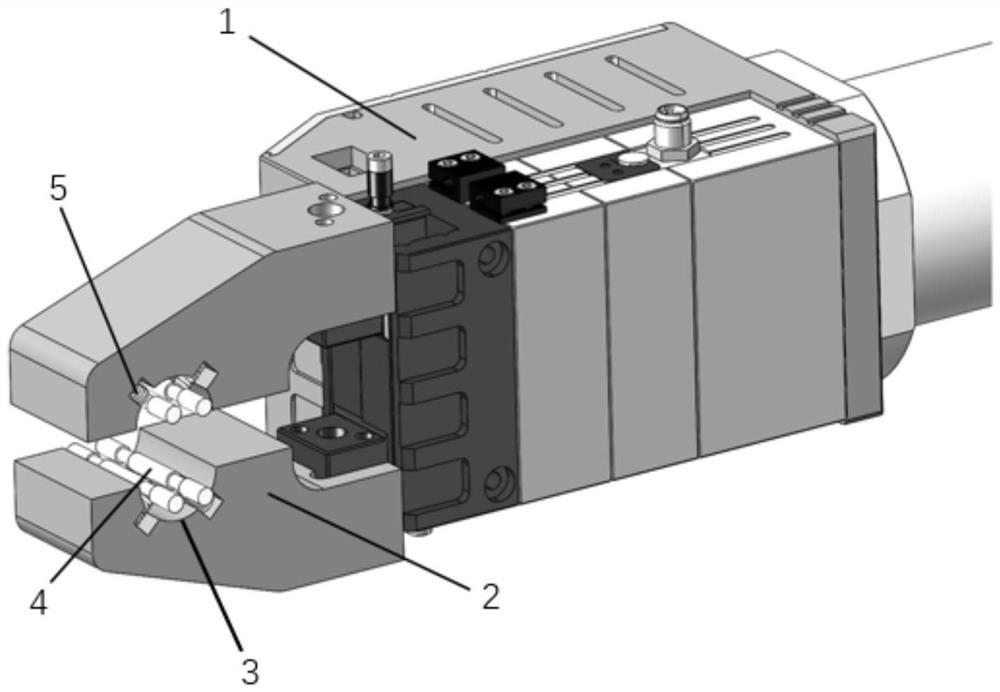
图1为本发明的实施方式提供的适用于配网带电作业机器人的导线夹持工具的结构示意图;
图2为本发明的实施方式提供的适用于配网带电作业机器人的导线夹持工具的部分结构框图;
图中:1、机械臂;2、夹爪;3、夹持槽;4、随转轴承;5、弹簧;6、微型压力片;7、遥操作端;8、通信模块;9、力反馈装置。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
图1为本发明的实施方式提供的适用于配网带电作业机器人的导线夹持工具的结构示意图。如图1所示,本发明的实施方式提供了一种适用于配网带电作业机器人的导线夹持工具,该导线夹持工具可以包括:
机械臂1,机械臂1上设置有两个夹爪2;
夹持槽3,夹持槽3位于夹爪2的中间部位,夹持槽3为半圆槽结构;
多个随转轴承4,多个随转轴承4对称地设置于夹持槽3的内壁。
进一步地,随转轴承4通过弹簧5连接于夹持槽3的内壁。
通过上述技术方案,本发明的实施方式提供的导线夹持工具在夹爪2的夹持槽3中对称地设置多个随转轴承4,当夹爪2抓住导线做绕导线中心旋转的运动时,由于随转轴承4的作用,夹爪2可以自由绕导线的轴线转动而不产生扭转应力,减小了机械臂的关节负担,仅对导线进行弯曲作业,大大降低配网带电作业机器人夹持移动绝缘导线时的机械臂末端负载。本发明提供的导线加持工具结构简单有效,既能消除绕导线旋转时的扭转力,也能在弯曲导线时使轴承位置产生一定的形变,间接减小对机械臂关节的扭转力,而且纯机械结构实现导线夹持移动负载的降低,大大简化了机械臂轨迹规划的难度
图2为本发明的实施方式提供的适用于配网带电作业机器人的导线夹持工具的部分结构框图。如图2所示,在本发明的一种实施方式中,该导线夹持工具还可以包括:
微型压力片6,微型压力片6设置于弹簧5的底部,微型压力片6用于检测弹簧5的压力值;
遥操作端7;
通信模块8,通信模块8用于将微型压力片6检测到的压力值发送到遥操作端7。
通过上述技术方案,本发明通过微型压力片6检测弹簧5受到的压力值,进而通过通信模块8将微型压力片6检测到的压力值发送到遥操作端7上,操作人员可以通过遥操作端7及时得知夹爪2和导线的夹持状态。
进一步地,在本发明的一种实施方式中,遥操作端7上设置有工具控制夹爪9,工具控制夹爪9可以用于控制夹爪2的开合程度,力反馈装置9包括由大拇指和食指控制的开合机构。
通过上述技术方案,操作人员利用本发明的力反馈装置9上由大拇指和食指控制的开合机构能直接控制夹爪2的开合,且夹爪2和导线之间的夹持力能够反馈到力反馈装置9上。操作人员根据反馈力来调整机械臂的运动,提高了遥操作的临场感,同时提高了作业的速度和成功率。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种适用于配网带电作业机器人的导线夹持工具
- 一种适用于工业机器人夹持的往复式泡沫切割工具