一种两自由度机械手机构
文献发布时间:2023-06-19 11:03:41
技术领域
本发明涉及一种机械手机构,尤其是一种两自由度机械手机构。
背景技术
在工业生产时,经常需要对物料进行位置转移,从而方便对物料进行不同工序的加工,为了提高工业生产加工的效率,很多公司都采用机械手来进行物件的位置转移,流水线上最常见的物件简单转移并不需要在三维空间进行移动,只需能进行简单的平移即可,但现有机械手结构虽然能满足该要求,但大多无法进行平移轨迹的编辑,这就局限了该类机械手的应用,少量可以进行平移轨迹编辑的机械手结构,结构又太过复杂、成本高。
发明内容
本发明的目的在于,克服上述现有技术的不足,提供一种平移轨迹可以编辑、结构简单紧凑、使用方便且动作快速的机械手装置。
为达到上述目的,本发明提供一种两自由度机械手机构,包括底座、平移板、滑杆、传动元件、滑动板、平移板驱动装置及滑杆驱动装置,所述平移板、平移板驱动装置、滑杆驱动装置与所述底座连接,所述滑杆、传动元件、滑动板与所述平移板连接,所述平移板驱动装置与所述平移板连接,所述滑杆驱动装置与所述滑杆连接,所述滑杆与所述传动元件连接,所述传动元件与所述滑动板连接。
当平移板驱动装置及滑杆驱动装置同步驱动平移板及滑杆运动时,滑动板将进行水平运动,如果仅滑杆驱动装置驱动滑杆运动,滑动板将进行竖直方向的运动,这样当平移板驱动装置及滑杆驱动装置运动不同步的时候,滑动板即可实现复合运动,即可以通过控制滑杆驱动装置和平移板驱动装置的运动情况,进行平移轨迹的编辑,从而满足更多的使用要求。
进一步的,该机械手机构还包括传感器,所述传感器固定于所述底座上,从而防止发生撞机等意外。
所述滑杆上设置有轨迹槽,所述滑动板上设置有轨迹槽,所述传动元件为摆杆,这样当滑杆驱动摆杆摆动时,摆杆将驱动滑动板在竖直方向运动。
所述滑杆上设置有齿条,所述滑动板上设置有齿条,所述传动元件为齿轮,这样当滑杆驱动齿轮旋转时,齿轮将驱动滑动板在竖直方向运动。
所述传动元件包括第一带轮、第二带轮、皮带、摆杆,所述滑动板上设置有轨迹槽,所述滑杆与所述皮带连接,所述第一带轮、第二带轮与所述皮带连接,所述摆杆固定于所述第二带轮上,所述摆杆与所述滑动板连接,这样当滑杆驱动皮带运动时,皮带将驱动第二带轮运动,第二带轮将通过驱动摆杆运动,从而驱动滑动板在竖直方向运动。
所述传动元件包括第一带轮、第二带轮、皮带、齿轮,所述滑动板上设置齿条,所述滑杆与所述皮带连接,所述第一带轮、第二带轮与所述皮带连接,所述齿轮固定于所述第二带轮上,所述齿轮与所述滑动板连接,这样当滑杆驱动皮带运动时,皮带将驱动第二带轮运动,第二带轮将通过驱动齿轮运动,从而驱动滑动板在竖直方向运动。
附图说明
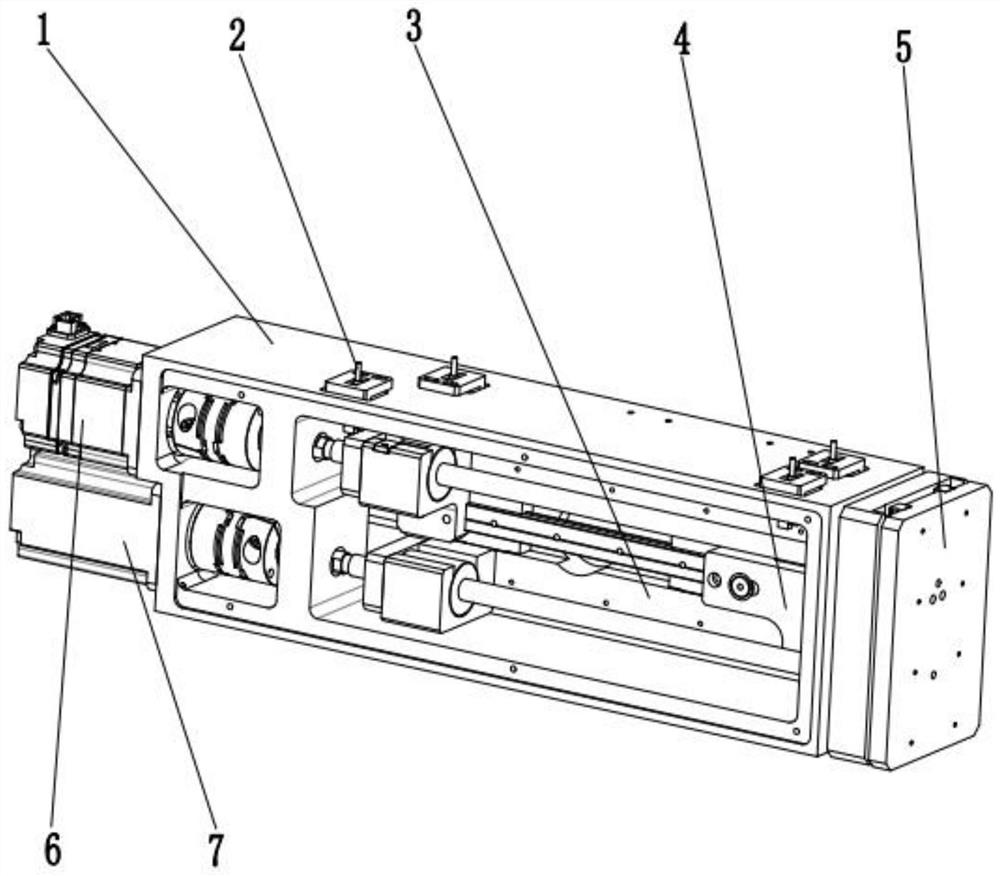
图1是本发明实施例1的立体视图;
图2是本发明实施例1的主视图;
图3是本发明实施例2的主视图;
图4是本发明实施例3的示意图;
图5是本发明实施例4的示意图;
图中:1、底座;2、传感器;3、平移板;4、滑杆;5、滑动板;6、滑杆驱动装置;7、平移板驱动装置;8、传动元件。
具体实施方式
为了更好的理解本发明的技术方案,下面将结合说明书附图详细的描述本发明提供的几个优选的实施例。
如图1所示,本发明的一种两自由度机械手机构,包括底座1、平移板3、滑杆4、传动元件8、滑动板5、平移板驱动装置7及滑杆驱动装置6,平移板3、平移板驱动装置7、滑杆驱动装置6与底座1连接,滑杆4、传动元件8、滑动板5与平移板3连接,平移板驱动装置7与平移板3连接,滑杆驱动装置6与滑杆4连接,滑杆4与传动元件8连接,传动元件8与滑动板5连接。
当平移板驱动装置7及滑杆驱动装置6同步驱动平移板3及滑杆4运动时,滑动板5将进行水平运动,如果仅滑杆驱动装置6驱动滑杆4运动,滑动板5将进行竖直方向的运动,这样当平移板驱动装置7及滑杆驱动装置6运动不同步的时候,滑动板5即可实现复合运动,即可以通过控制滑杆驱动装置6和平移板驱动装置7的运动情况,进行平移轨迹的编辑,从而满足更多的使用要求。
如图1所示,该机械手机构还包括传感器2,传感器2固定于底座1上,从而防止发生撞机等意外。
如图1所示,滑杆4上设置有轨迹槽,滑动板5上设置有轨迹槽,传动元件8为摆杆,这样当滑杆4驱动摆杆8摆动时,摆杆8将驱动滑动板5在竖直方向运动。
如图3所示第二实施例,滑杆4上设置有齿条,滑动板5上设置有齿条,传动元件8为齿轮,这样当滑杆4驱动齿轮旋转时,齿轮将驱动滑动板5在竖直方向运动。
如图4所示第三实施例,传动元件8包括第一带轮、第二带轮、皮带、摆杆,滑动板5上设置有轨迹槽,滑杆4与皮带连接,第一带轮、第二带轮与皮带连接,摆杆固定于第二带轮上,摆杆与滑动板5连接,这样当滑杆4驱动皮带运动时,皮带将驱动第二带轮运动,第二带轮将通过驱动摆杆运动,从而驱动滑动板5在竖直方向运动。
如图5所示第四实施例,传动元件8包括第一带轮、第二带轮、皮带、齿轮,滑动板5上设置齿条,滑杆4与皮带连接,第一带轮、第二带轮与皮带连接,齿轮固定于第二带轮上,齿轮与滑动板5连接,这样当滑杆4驱动皮带运动时,皮带将驱动第二带轮运动,第二带轮将通过驱动齿轮运动,从而驱动滑动板5在竖直方向运动。
最后应该说明的是:显然,上述实施例仅仅是为清楚地说明本发明所作的举例,而并非对实施方式的限定。对于所属技术领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引申出的显而易见的变化或变动仍处于本发明的保护范围。
- 一种两自由度机械手机构
- 一种两自由度连杆机构点焊机械手