机器人行走轴
文献发布时间:2023-06-19 11:03:41
技术领域
本发明涉及一种机器人行走轴,特别涉及一种改进的机器人行走轴,属于机器人行走轴领域。
背景技术
机器人行走轴又称机器人地轨、机器人外轴、第七轴,机器人行走轴的主要作用是带动工业机器人运动,使得机器人能在预定的路线上行进移动,从而扩大了机器人的作业半径,提高了机器人的工作效率,对于自身没有标配移动装置的工业机器人是不二的选择。机器人行走轴具有移动速度较快,定位精度高等特点,适用于机床工件上下料、焊接、装配、喷涂、检验、铸造、锻压、热处理、金属切削加工、搬运、码垛等工序。现有的机器人地轨采用拖链动力驱动,易积灰,影响工作效率,驱动设备外置,占用空间较大,而且机器人的工作位置无法调整,适用性受到限制。
发明内容
本发明机器人行走轴公开了新的方案,采用丝杠驱动的地轨与机器人调节装置相结合的方案,解决了现有方案采用拖链动力驱动方式带来的适用性受限的问题。
本发明机器人行走轴包括地轨,地轨包括底座板,底座板的一端上设有驱动电机,底座板上设有行进轨道,行进轨道上设有滚轮滑块,滚轮滑块的上方设有机器人基座台,机器人基座台的底部通过筋板结构与滚轮滑块的顶部连接,机器人基座台上设有机器人调节装置,机器人调节装置与机器人传动连接,机器人调节装置包括机器人自转装置、机器人倾斜装置,机器人自转装置驱动机器人自转,机器人倾斜装置驱动机器人向地轨的一侧倾斜,驱动电机的输出轴与驱动丝杠传动连接,驱动丝杆伸入滚轮滑块形成螺纹传动连接,驱动电机驱动驱动丝杠通过上述螺纹传动连接推动滚轮滑块沿行进轨道往复运动。
进一步,本方案的机器人行走轴还包括地轨外箱体,地轨外箱体包括方柱筒外壳,方柱筒外壳的首尾端封设有端头板,方柱筒外壳的底部设有所述底座板,方柱筒外壳的顶部的上方设有机器人基座台,机器人基座台的底部通过穿过方柱筒外壳顶部上的长条孔的筋板结构与滚轮滑块连接。
更进一步,本方案的方柱筒外壳的外侧下部通过多个脚座固定在地面上,脚座包括脚座底板,脚座底板上设有若干直角连接立板,直角连接立板的直角边底面与脚座底板连接,直角连接立板的直角边侧面与方柱筒外壳的外侧下部连接。
更进一步,本方案的方柱筒外壳内的一端的端头的底座板上设有吸振橡胶硬座,吸振橡胶硬座上设有驱动电机,吸振橡胶硬座吸收驱动电机产生的振动。
进一步,本方案的行进轨道包括相互平行的两条直滑轨,滚轮滑块包括滑块底座板,滑块底座板上固设有滑块体,滑块底座板的底部的角端上设有滚轮部件,滚轮部件与对应的直滑轨配合形成滚动连接。
更进一步,本方案的直滑轨包括滑轨底座板,滑轨底座板上设有相互平行的两条滑轨侧边立板,两条滑轨侧边板间的滑槽内的中线上设有分槽板,分槽板将上述两条滑轨侧边立板间的滑槽分隔成左右两条平行等宽的分滑槽,滚轮部件包括轮轴,轮轴的两端设有滚轮,轮轴的中部通过筋板结构与滑块底座板的底部连接,滚轮与对应的分滑槽配合形成滚动连接。
进一步,本方案的机器人自转装置包括自转装置底座板,自转装置底座板与机器人基座台连接,自转装置底座板上设有自转驱动电机,自转驱动电机的驱动轴向上与自转承载台的底部连接,自转承载台上设有机器人。
更进一步,本方案的自转驱动电机的外部设有自转驱动电机箱体,自转承载台设在自转驱动电机箱体的上方,自转驱动电机的驱动轴向上穿过自转驱动电机箱体顶部的通孔与自转承载台的底部连接。
进一步,本方案的机器人倾斜装置包括倾斜装置底座板,倾斜装置底座板与机器人基座台连接,倾斜装置底座板上设有倾斜驱动电机,倾斜驱动电机的驱动轴上设有主动齿轮,主动齿轮与变向传动齿轮传动连接,变向传动齿轮与倾斜驱动齿轮传动连接,倾斜驱动齿轮通过板筋结构与倾斜承载台的底部连接,倾斜承载台上设有机器人。
更进一步,本方案的倾斜驱动电机的外部设有倾斜驱动电机箱体,倾斜承载台设在倾斜驱动电机箱体的上方,倾斜承载台的底部通过穿过倾斜驱动电机箱体顶部的通孔的板筋结构与倾斜驱动齿轮连接。
本发明机器人行走轴采用丝杠驱动的地轨与机器人调节装置相结合的方案,具有精简、可靠以及机器人工作位置可调的特点。
附图说明
图1是机器人行走轴实例之一的示意图。
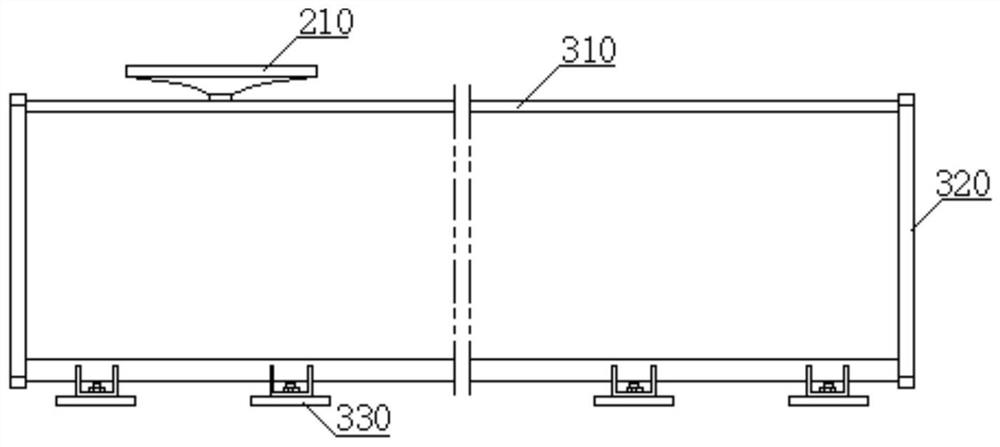
图2是地轨的主视示意图。
图3是图2中地轨的内部示意图。
图4是地轨的左视内部示意图。
图5是机器人自转装置的示意图。
图6是机器人倾斜装置的示意图。
图7是机器人倾斜装置工作状态之一的示意图。
其中,100是地轨,110是底座板,111是直滑轨,120是驱动电机,121是吸振橡胶硬座,130是驱动丝杠,141是滑块体,150是滚轮部件,151是滚轮,210是机器人基座台,310是方柱筒外壳,320是端头板,330是脚座。400是机器人自转装置,410是自转装置底座板,420是自转驱动电机,430是自转承载台,440是自转驱动电机箱体,500是机器人倾斜装置,510是倾斜装置底座板,520是倾斜驱动电机,531是主动齿轮,532是变向传动齿轮,533是倾斜驱动齿轮,540是倾斜承载台,550是倾斜驱动电机箱体。
具体实施方式
如图1、2、3、4所示,本发明机器人行走轴包括地轨,地轨包括底座板,底座板的一端上设有驱动电机,底座板上设有行进轨道,行进轨道上设有滚轮滑块,滚轮滑块的上方设有机器人基座台,机器人基座台的底部通过筋板结构与滚轮滑块的顶部连接,机器人基座台上设有机器人调节装置,机器人调节装置与机器人传动连接,机器人调节装置包括机器人自转装置、机器人倾斜装置,机器人自转装置驱动机器人自转,机器人倾斜装置驱动机器人向地轨的一侧倾斜,驱动电机的输出轴与驱动丝杠传动连接,驱动丝杆伸入滚轮滑块形成螺纹传动连接,驱动电机驱动驱动丝杠通过上述螺纹传动连接推动滚轮滑块沿行进轨道往复运动。上述方案采用丝杠驱动的地轨与机器人调节装置相结合的方案,首先使用地轨将其上的机器人输运至操作位置,然后通过机器人自转装置、机器人倾斜装置分别调节机器人的面朝方向以及向地轨一侧的倾斜角度,实现了机器人的快速、精确定位、调节的技术目的,显著提高了机器人的灵活性和适用性,同时避免了采用拖链驱动的地轨带来的占用空间大,结构复杂,易受外部环境影响而发生故障的问题。
为了避免传动设备收到外部的影响,防止灰尘侵入,影响传动精度,本方案的机器人行走轴还包括地轨外箱体,地轨外箱体包括方柱筒外壳,方柱筒外壳的首尾端封设有端头板,方柱筒外壳的底部设有所述底座板,方柱筒外壳的顶部的上方设有机器人基座台,机器人基座台的底部通过穿过方柱筒外壳顶部上的长条孔的筋板结构与滚轮滑块连接。基于以上方案,为了保证地轨外箱体稳定的立设在地面上,本方案的方柱筒外壳的外侧下部通过多个脚座固定在地面上,脚座包括脚座底板,脚座底板上设有若干直角连接立板,直角连接立板的直角边底面与脚座底板连接,直角连接立板的直角边侧面与方柱筒外壳的外侧下部连接。为了减轻驱动电机工作是产生的振动对传动精度的影响,本方案的方柱筒外壳内的一端的端头的底座板上设有吸振橡胶硬座,吸振橡胶硬座上设有驱动电机,吸振橡胶硬座吸收驱动电机产生的振动。
为了实现行进轨道的功能,提高滑轮运动的稳定性,如图3、4所示,本方案的行进轨道包括相互平行的两条直滑轨,滚轮滑块包括滑块底座板,滑块底座板上固设有滑块体,滑块底座板的底部的角端上设有滚轮部件,滚轮部件与对应的直滑轨配合形成滚动连接。基于以上方案,为了增强直滑轨的稳定性以及轮轨配合精度,本方案还引入了双轨双轮配合方案,即本方案的直滑轨包括滑轨底座板,滑轨底座板上设有相互平行的两条滑轨侧边立板,两条滑轨侧边板间的滑槽内的中线上设有分槽板,分槽板将上述两条滑轨侧边立板间的滑槽分隔成左右两条平行等宽的分滑槽,滚轮部件包括轮轴,轮轴的两端设有滚轮,轮轴的中部通过筋板结构与滑块底座板的底部连接,滚轮与对应的分滑槽配合形成滚动连接。
为了实现机器人自转装置的功能,如图5所示,本方案的机器人自转装置包括自转装置底座板,自转装置底座板与机器人基座台连接,自转装置底座板上设有自转驱动电机,自转驱动电机的驱动轴向上与自转承载台的底部连接,自转承载台上设有机器人。基于以上方案,为了避免传动设备收到外部的影响,防止灰尘侵入,本方案的自转驱动电机的外部设有自转驱动电机箱体,自转承载台设在自转驱动电机箱体的上方,自转驱动电机的驱动轴向上穿过自转驱动电机箱体顶部的通孔与自转承载台的底部连接。
为了实现机器人倾斜装置的功能,如图6、7所示,本方案的机器人倾斜装置包括倾斜装置底座板,倾斜装置底座板与机器人基座台连接,倾斜装置底座板上设有倾斜驱动电机,倾斜驱动电机的驱动轴上设有主动齿轮,主动齿轮与变向传动齿轮传动连接,变向传动齿轮与倾斜驱动齿轮传动连接,倾斜驱动齿轮通过板筋结构与倾斜承载台的底部连接,倾斜承载台上设有机器人。基于以上方案,为了避免传动设备收到外部的影响,防止灰尘侵入,本方案的倾斜驱动电机的外部设有倾斜驱动电机箱体,倾斜承载台设在倾斜驱动电机箱体的上方,倾斜承载台的底部通过穿过倾斜驱动电机箱体顶部的通孔的板筋结构与倾斜驱动齿轮连接。
本方案公开的装置、部件等除有特别说明外,均可以采用本领域公知的通用、惯用的方案实现。
本方案机器人行走轴并不限于具体实施方式中公开的内容,实施例中出现的技术方案可以基于本领域技术人员的理解而延伸,本领域技术人员根据本方案结合公知常识作出的简单替换方案也属于本方案的范围。
- 一种行走地轨机器人的行走轴
- 行走机器人、控制行走机器人的方法和行走机器人系统