一种适用于工业流水线的抓举机器人
文献发布时间:2023-06-19 11:06:50
技术领域
本发明属于机器人技术领域,具体涉及一种适用于工业流水线的抓举机器人。
背景技术
机器人(Robot)是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类工作的工作,例如生产业、建筑业,或是危险的工作。
与现有技术相比较存在的问题:
现在流水线上流动速度快,工作繁忙,工作量大,对于残次产品通过人工进行挑选,费事费力,且效率底。
发明内容
为解决上述背景技术中提出的问题。本发明提供了一种适用于工业流水线的抓举机器人,具有自动分类残次产品、且工作效率高的特点。
为实现上述目的,本发明提供如下技术方案:一种适用于工业流水线的抓举机器人,包括机器人主控仓,所述机器人主控仓的底端安设有万向轮,所述机器人主控仓的中部安设有电动升降杆,所述电动升降杆的上侧安设有电机一,所述电机一的上侧安设有抓举平台,所述抓举平台的一侧安设有电机二,所述抓举平台的另一侧安设有摄像模块,所述机器人主控仓的内侧安设有控制箱,所述抓举平台的前侧安设有收缩结构,所述收缩结构的前端两侧安设有夹具。
优选的,所述控制箱包括PLC、CPU、存储器,且与电动升降杆、电机一、电机二、收缩结构、电机二、压力传感器电性连接。
优选的,所述电机一的动子轴连接抓举平台,且与控制箱电性连接;通过控制箱得到检测有残次品的固定数据,电机一带动抓举平台进行180°的旋转,且电动升降杆带动抓举平台上下调节位置,使用简单方便。
优选的,所述抓举平台的内部安设有固定链条与相对应的齿轮,且齿轮连接电机二,电机二与控制箱电性连接;当控制箱得到有残次品信息,控制电机二带动抓举平台整体将前移动,夹住残次品,简单方便。
优选的,所述摄像模块与控制箱电性连接,摄像模块包括图像识别;通过控制箱输入产品的固定图片,通过摄像模块的图像识别,来区分残次品。
优选的,所述收缩结构包括连接结构,所述连接结构与夹具固定安设,所述收缩结构与夹具的连接端,开设有条形滑口,收缩结构内侧安设有自动伸缩杆,且与控制箱电性连接;当夹具对准残次品,收缩结构内端自动伸缩杆,进行伸缩夹紧产品,使用简单方便。
优选的,所述夹具内部安设有压力传感器,且夹口端安设有橡胶齿片;通过安设的压力传感器,当在夹产品时,具有防止用力过大,夹坏产品,橡胶齿片对产品具有保护与防滑作用。
与现有技术相比,本发明的有益效果是:通过控制箱输入产品的固定图片,通过摄像模块的图像识别,来区分残次品摄像模块识别到有残次品,进行自动夹住残次产品,将残次产品,旋转180°放到残次区,通过安设的压力传感器,当在夹产品时,具有防止用力过大,夹坏产品,橡胶齿片对产品具有保护与防滑作用,使用简单方便,且省时省力,使用效率高。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
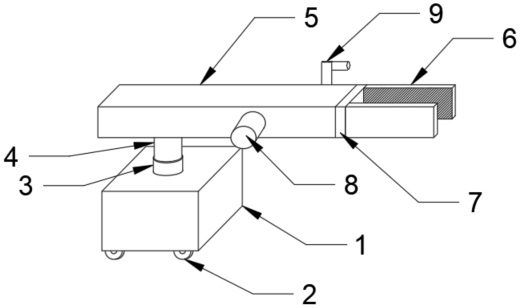
图1为本发明的结构示意图。
图2为本发明的透视结构示意图。
图3为本发明的俯视结构示意图。
图4为本发明中夹具的剖视结构示意图。
图中:1、机器人主控仓;2、万向轮;3、电动升降杆;4、电机一;5、抓举平台;6、夹具;601、压力传感器;602、橡胶齿片;7、收缩结构;701、连接结构;8、电机二;9、摄像模块;10、控制箱。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-图4,本发明提供以下技术方案:一种适用于工业流水线的抓举机器人,包括机器人主控仓1,机器人主控仓1的底端安设有万向轮2,机器人主控仓1的中部安设有电动升降杆3,电动升降杆3的上侧安设有电机一4,电机一4的上侧安设有抓举平台5,抓举平台5的一侧安设有电机二8,抓举平台5的另一侧安设有摄像模块9,机器人主控仓1的内侧安设有控制箱10,抓举平台5的前侧安设有收缩结构7,收缩结构7的前端两侧安设有夹具6。
本实施例中:PLC的型号为 CP1W-20EDT。
本实施例中:压力传感器的型号为PT124G-111。
本实施例中:电动升降杆的型号为T5-110-1500-6000。
本实施例中:自动伸缩杆的型号为FY011。
具体的,控制箱10包括PLC、CPU、存储器,且与电动升降杆3、电机一4、电机二8、收缩结构7、电机二8、压力传感器601电性连接。
具体的,电机一4的动子轴连接抓举平台5,且与控制箱10电性连接;通过控制箱10得到检测有残次品的固定数据,电机一4带动抓举平台5进行180°的旋转,且电动升降杆3带动抓举平台5上下调节位置,使用简单方便。
具体的,抓举平台5的内部安设有固定链条与相对应的齿轮,且齿轮连接电机二8,电机二8与控制箱10电性连接;当控制箱10得到有残次品信息,控制电机二8带动抓举平台5整体将前移动,夹住残次品,简单方便。
具体的,摄像模块9与控制箱10电性连接,摄像模块9包括图像识别;通过控制箱10输入产品的固定图片,通过摄像模块9的图像识别,来区分残次品。
具体的,收缩结构7包括连接结构701,连接结构701与夹具6固定安设,收缩结构7与夹具6的连接端,开设有条形滑口,收缩结构7内侧安设有自动伸缩杆,且与控制箱10电性连接;当夹具6对准残次品,收缩结构7内端自动伸缩杆,进行伸缩夹紧产品,使用简单方便。
具体的,夹具6内部安设有压力传感器601,且夹口端安设有橡胶齿片602;通过安设的压力传感器601,当在夹产品时,具有防止用力过大,夹坏产品,橡胶齿片602对产品具有保护与防滑作用。
本发明的工作原理及使用流程:在使用时,首先电动升降杆3带动抓举平台5上下调节位置,通过控制箱10输入产品的固定图片,通过摄像模块9的图像识别,来区分残次品,控制电机二8带动抓举平台5整体将前移动,夹具6对准残次品,收缩结构7内端自动伸缩杆,进行伸缩夹紧产品,通过安设的压力传感器601,当在夹产品时,具有防止用力过大,夹坏产品,橡胶齿片602对产品具有保护与防滑作用,电机一4带动抓举平台5进行180°的旋转。
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包括在本发明的保护范围之内。
- 一种适用于工业流水线的抓举机器人
- 一种工业抓举搬运机器人