一种大物流集中地的自动避障运输机器人
文献发布时间:2023-06-19 11:06:50
技术领域
本发明属于机器人技术领域,具体涉及一种大物流集中地的自动避障运输机器人。
背景技术
机器人(Robot)是自动执行工作的机器装置。它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。它的任务是协助或取代人类工作的工作,例如生产业、建筑业,或是危险的工作。
与现有技术相比较存在的问题:
现在由于物流也发展较广,其仅人工搬运货物,一是忙不过来,二是费时费力。
发明内容
为解决上述背景技术中提出的问题。本发明提供了一种大物流集中地的自动避障运输机器人,具有自动搬用使用方便、且工作效率高的特点。
为实现上述目的,本发明提供如下技术方案:一种大物流集中地的自动避障运输机器人,包括机器人主控仓,所述机器人主控仓的底端安设有万向轮,所述机器人主控仓的前侧安设有运输铲,所述机器人主控仓包括驱动电机、显示屏、警报器、摄像监控模块、充电口,所述运输铲包括电动伸缩杆一、挡板、铲板、固定架、电动伸缩杆二、旋转轴、挡板、摄像头。
优选的,所述机器人主控仓内部安设有主控制模块,所述主控制模块包括PLC、CPU、存储器、导航模块、无线传输模块、计数器、防跌撞传感器。
优选的,所述机器人主控仓的底侧安设有驱动电机,且驱动电机连接万向轮,所述驱动电机的一侧开设有充电口,所述驱动电机与防跌撞传感器电性连接;通过驱动电机驱动万向轮自动移动,通过设置有防跌幢传感器,可防止碰到货物。
优选的,所述机器人主控仓的前侧安设有显示屏,所述机器人主控仓的顶端分别安设有警报器、摄像监控模块,且显示屏、警报器、摄像监控模块与主控制模块电性连接;通过摄像监控模块观察路线,通过导航模块进行识别路线,当识别到无路径可走,或无法进行继续工作状态,会自动发出警报,进行提示,显示屏上实时显示监视录像,及得到的数据。
优选的,所述运输铲与机器人主控仓的之间安设有电动伸缩杆一,且电动伸缩杆一为运输铲与机器人主控仓的连接端,所述电动伸缩杆一与主控制模块电性连接;通过电动伸缩杆一带动运输铲整体向下向上自动移动,当将货物装满,电动伸缩杆一带动运输铲自动向上,使用简单方便。
优选的,所述铲板的两边缘安设有挡板,所述铲板的上侧安设有传输带,底端安设有电子秤,且均与主控制模块电性连接;当货物铲到铲板边缘处,PLC控制传输带将货物滑到最内端,且通过电子秤对货物的称量,方便货物的计算,使用简单方便。
优选的,所述挡板的两侧均安设有固定架,所述固定架的前端连接安设有电动伸缩杆二,所述电动伸缩杆二的中部安设有旋转轴,所述旋转轴的上侧安设有挡板,所述挡板的一侧安设有摄像头,且均与主控制模块电性连接;当铲到的货物在边缘,其旋转轴带动挡板向内旋转90°,其次电动伸缩杆二向内收缩将货物向上推,且当货物盛放满了,其两挡板可作为挡板作用,防止货物掉落,使用简单方便,通过设置的摄像头可前后检测防止碰到东西或货物,安全可靠。
与现有技术相比,本发明的有益效果是:通过摄像监控模块观察路线,通过导航模块进行识别路线,当识别到无路径可走,或无法进行继续工作状态,会自动发出警报,进行提示,显示屏上实时显示监视录像,及得到的数据,通过驱动电机驱动万向轮自动移动,通过在最前端设置的摄像头可前后检测防止碰到东西或货物,安全可靠,通过设置有防跌幢传感器,可防止碰到货物,当货物铲到铲板边缘处,PLC控制传输带将货物滑到最内端,且通过电子秤对货物的称量,方便货物的计算,当铲到的货物在边缘,其旋转轴带动挡板向内旋转90°,其次电动伸缩杆二向内收缩将货物向上推,且当货物盛放满了,其两挡板可作为挡板作用,防止货物掉落,使用简单方便,省时省力。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
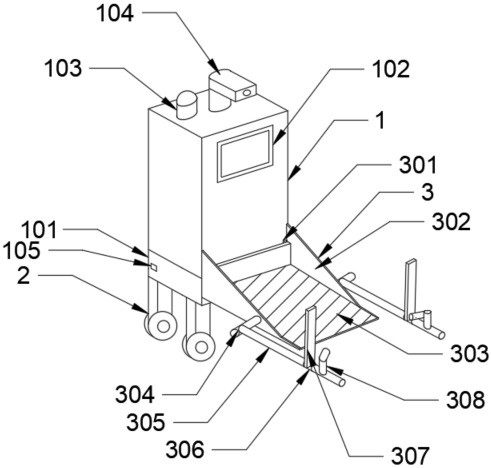
图1为本发明的结构示意图。
图2为本发明的俯视结构示意图。
图中:1、机器人主控仓;101、驱动电机;102、显示屏;103、警报器;104、摄像监控模块;105、充电口;2、万向轮;3、运输铲;301、电动伸缩杆一;302、挡板;303、铲板;304、固定架;305、电动伸缩杆二;306、旋转轴;307、挡板;308、摄像头。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-图2,本发明提供以下技术方案:一种大物流集中地的自动避障运输机器人,包括机器人主控仓1,机器人主控仓1的底端安设有万向轮2,机器人主控仓1的前侧安设有运输铲3,机器人主控仓1包括驱动电机101、显示屏102、警报器103、摄像监控模块104、充电口105,运输铲3包括电动伸缩杆一301、挡板302、铲板303、固定架304、电动伸缩杆二305、旋转轴306、挡板307、摄像头308。
本实施例中:PLC的型号为 CP1W-20EDT。
本实施例中:电动伸缩杆的型号为FY011。
具体的,机器人主控仓1内部安设有主控制模块,主控制模块包括PLC、CPU、存储器、导航模块、无线传输模块、计数器、防跌撞传感器。
具体的,机器人主控仓1的底侧安设有驱动电机101,且驱动电机101连接万向轮2,驱动电机101的一侧开设有充电口105,驱动电机101与防跌撞传感器电性连接;通过驱动电机101驱动万向轮2自动移动,通过设置有防跌幢传感器,可防止碰到货物。
具体的,机器人主控仓1的前侧安设有显示屏102,机器人主控仓1的顶端分别安设有警报器103、摄像监控模块104,且显示屏102、警报器103、摄像监控模块104与主控制模块电性连接;通过摄像监控模块104观察路线,通过导航模块进行识别路线,当识别到无路径可走,或无法进行继续工作状态,会自动发出警报,进行提示,显示屏102上实时显示监视录像,及得到的数据。
具体的,运输铲3与机器人主控仓1的之间安设有电动伸缩杆一301,且电动伸缩杆一301为运输铲3与机器人主控仓1的连接端,电动伸缩杆一301与主控制模块电性连接;通过电动伸缩杆一301带动运输铲3整体向下向上自动移动,当将货物装满,电动伸缩杆一301带动运输铲3自动向上,使用简单方便。
具体的,铲板303的两边缘安设有挡板302,铲板303的上侧安设有传输带,底端安设有电子秤,且均与主控制模块电性连接;当货物铲到铲板303边缘处,PLC控制传输带将货物滑到最内端,且通过电子秤对货物的称量,方便货物的计算,使用简单方便。
具体的,挡板302的两侧均安设有固定架304,固定架304的前端连接安设有电动伸缩杆二305,电动伸缩杆二305的中部安设有旋转轴306,旋转轴306的上侧安设有挡板307,挡板307的一侧安设有摄像头308,且均与主控制模块电性连接;当铲到的货物在边缘,其旋转轴306带动挡板307向内旋转90°,其次电动伸缩杆二305向内收缩将货物向上推,且当货物盛放满了,其两挡板307可作为挡板作用,防止货物掉落,使用简单方便,通过设置的摄像头308可前后检测防止碰到东西或货物,安全可靠。
本发明的工作原理及使用流程:在使用时,首先打开开关,通过驱动电机101驱动万向轮2自动移动,通过设置有防跌幢传感器,可防止碰到货物,通过摄像监控模块104观察路线,通过导航模块进行识别路线,当识别到无路径可走,或无法进行继续工作状态,会自动发出警报,进行提示,显示屏102上实时显示监视录像,及得到的数据,通过电动伸缩杆一301带动运输铲3整体向下向上自动移动,当将货物装满,电动伸缩杆一301带动运输铲3自动向上,使用简单方便,当货物铲到铲板303边缘处,PLC控制传输带将货物滑到最内端,且通过电子秤对货物的称量,方便货物的计算,使用简单方便,当铲到的货物在边缘,其旋转轴306带动挡板307向内旋转90°,其次电动伸缩杆二305向内收缩将货物向上推,且当货物盛放满了,其两挡板307可作为挡板作用,防止货物掉落,使用简单方便,通过设置的摄像头308可前后检测防止碰到东西或货物,安全可靠。
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包括在本发明的保护范围之内。
- 一种大物流集中地的自动避障运输机器人
- 一种车辆集中地追加运输车辆配置方法