一种用于管道的气动软体机器人
文献发布时间:2023-06-19 11:06:50
技术领域
本发明属于管道机器人技术领域,具体是一种用于管道的气动软体机器人。
背景技术
管道作为一种有效物料运输手段,被广泛应用于城市基础设施、工业运输系统等众多领域。现阶段管道作业方式主要是传统人工作业,通过人工方式在管道中进行维修检测和清理作业不仅较为困难,效率低下,同时有一定的危险性。随着科学技术和制造业水平的不断提高,提高管道作业的智能化水平已经成为工业化背景下日常生活和社会生产的有力保障。
现有管道机器人主要采用轮式结构,这种结构不仅导致机器人的体积大,且不能较好地适应管道中复杂多变的情况,运动灵活性较差。对于轮式管道机器人在实际应用过程中遇到的问题,譬如在弯管和不规则管道时发生运动干涉,由于内耗造成的驱动力不足,壁面的变形以及机器人本身的误差,导致机器人在管道中偏离正确的姿态,甚至侧翻和卡死这些问题。在常见的管道机器人中,轮式机器人和履带机器人无法在直上直下的管道内运动,在管道多分支岔口处转向运动较困难。
公开号为CN101625062B的中国专利公开了一种具有导向头的柔性蠕动管道机器人,通过前置导向头和磁性推拉轮杆机构实现转弯,但是该机器人包含左、右两个刚性半球壳,因此只能在较大折弯半径的T形管道中运动,无法适应管径变化的管道结构。
公开号为CN209663924U的中国专利公开了一种管道清洁机器人,该清洁机器人的除尘装置通过电机连接于控制机构,实现管道清洁,但是结构过于复杂,无法适应各种弯曲管道的内部复杂结构。
综上所述,现有管道机器人初步解决了管道作业问题,但是管道机器人的适应性差,面对不同直径的管道时运动性能低,无法在弯曲管道中全向运动,而且通用性差无法满足对于管道机器人作业的多种功能需求。因此,亟需设计一种能柔性自适应不同管径,实现全向柔性进给运动的气动软体管道机器人,旨在完成不同管道环境下的多功能作业。
发明内容
针对现有技术的不足,本发明拟解决的技术问题是,提供一种用于管道的气动软体机器人。
为了解决上述技术问题,本发明采用的技术方案为:
一种用于管道的气动软体机器人,其特征在于,该机器人包括功能模块、气泵、方向调节气囊组、行走驱动件和两个固定气囊;
行走驱动件的两端与两个固定气囊的一端连接,气泵安装在一个固定气囊的另一端;方向调节气囊组的一端与另一个固定气囊的另一端连接,功能模块安装在方向调节气囊组的另一端;行走驱动件能够随着充、放气而伸长、缩短;方向调节气囊组包含至少三个椭球形气囊,每个椭球形气囊与相邻的椭球形气囊相互紧连在一起,各个椭球形气囊的膨胀和收缩运动相互独立,通过所有椭球形气囊的协调运动实现机器人的转向。
该机器人还包括进气管和出气管;进气管和出气管依次贯穿所有的固定气囊和行走驱动件,进气管的一端以及出气管的一端分别引出与方向调节气囊组的椭球形气囊数量相同的延伸部,保证每个椭球形气囊内均含有一个进气管的延伸部和一个出气管的延伸部;进气管和出气管分别在行走驱动件、各个固定气囊以及各个椭球形气囊的内部分别安装有气动电磁阀,进气管的另一端与气泵8的输出端连接,出气管的另一端位于机器人外部。
该机器人还包括微控制器和开关量模块,微控制器通过TTL转换模块连接通讯总线,通讯总线连接有多个开关量模块,保证每个行走驱动件、固定气囊以及椭球形气囊内均含有一个开关量模块,每个开关量模块分别与相应的两个气动电磁阀连接。
微控制器内存储有机器人运动控制程序:
开始运动时,位于机器人尾部的固定气囊充气膨胀并保持膨胀状态,使与气泵连接的固定气囊与管道内壁紧密贴合;行走驱动件充气伸长并保持伸长状态,实现机器人的前进;然后位于方向调节气囊组和行走驱动件之间的固定气囊充气膨胀并保持膨胀状态,使位于方向调节气囊组和行走驱动件之间的固定气囊与管道内壁紧密贴合,同时与气泵连接的固定气囊放气收缩至自然状态;行走驱动件放气缩短至自然状态,以此完成机器人一个行走周期的前进;然后位于方向调节气囊组和行走驱动件之间的固定气囊放气收缩至自然状态,机器人进入下一个行走周期,以此完成机器人的蠕动前进,此过程为直线行走状态,方向调节气囊组不工作;
当机器人运动到管道的岔口处,方向调节气囊组的邻近转向方向的椭球形气囊保持自然状态,远离转向方向的椭球形气囊充气膨胀并挤压邻近转向方向的椭球形气囊,当远离转向方向的椭球形气囊内的气压足够大时,方向调节气囊组整体偏向邻近转向方向的一侧,行走驱动件充气伸长使机器人的头部完成转向;当机器人的头部完成转向后,机器人继续蠕动前进,实现机器人尾部的被动转向,进而完成整个机器人的转向运动。
所述功能模块包括温湿度传感器、酸碱度传感器、摄像头、清洁毛刷或红外热成像模块。
行走驱动件的两端分别设有二号连接头,二号连接头包括设有连接头本体,连接头本体的一端设有伸出部,连接头本体与行走驱动件的端部螺纹连接。
固定气囊以及方向调节气囊组的两端分别设有一号连接头,一号连接头包括连接盘和位于连接盘端面上的螺柱。
所述方向调节气囊组包含三个椭球形气囊,三个椭球形气囊相互紧连在一起,相邻两个椭球形气囊之间的夹角为120°;每个椭球形气囊的长度为75mm,最大直径为25mm。
所述行走驱动件为波纹管;波纹管的直径为40mm,长度为50mm。
所述固定气囊的中部粗,两端细,固定气囊的长度为200mm,最大直径为80mm。
与现有技术相比,本发明的有益效果在于:
1.机器人的主体结构为橡胶材质的充气式气囊和具有伸缩功能的波纹管,体积易改变可柔性自适应不同管径大小的管道,满足机器人前进过程中的通用性和安全性;固定气囊和椭球形气囊均为充气式的橡胶气囊,通过气动电磁阀的开闭控制橡胶气囊的充放气;由于橡胶气囊具有良好的伸缩特性,且内部充满柔性气体,体积可大可小,可以柔性自适应不同口径大小的管道,很好地解决了现有的管道机器人只能在特定直径管道作业的局限,能够满足不同口径的管道,具有良好的普适性;通过橡胶气囊能够实现机器人与管道内壁的柔性接触,不至于损坏管道内壁,满足安全性需求。
2.方向调节气囊组采用多个椭球形气囊组成,通过一部分椭球形气囊膨胀挤压另一部分椭球形气囊,调节机器人的运动方向,通过固定气囊和行走驱动件的伸缩配合可实现面向各类管道全向柔性进给运动,解决了现有管道机器人因其机械结构限制无法适应管道内部的复杂结构,实现全向柔性进给运动。行走驱动件采用波纹管构成,波纹管为管状弹性敏感元件,具有伸展能力强、易驱动的特点;当管道弯曲量较大时,机器人通过方向调节气囊组主动调整方向,以进入弯曲管道,对于弯曲量较小普通管道,由于本发明的主要构成材料为橡胶和波纹管,具有易驱动自适应能力强的特点,依靠柔性惯性实现被动弯曲,这种方式容易驱动,减少了驱动过程中能源的浪费。
3.该机器人的功能模块、气泵、方向调节气囊组、行走驱动件和固定气囊均属于模块化结构,每个部件上均设有连接头,通过连接头可以实现部件之间的快速拆装,方便维修和更换;当机器人出现故障时只需排查各个模块,更换其中出现问题的模块。
4.本发明的功能模块包括摄像头、温湿度传感器、酸碱度传感器和清洁毛刷,可实现管道的检测、探测及清洁等功能,满足特定的需求;还可以红外热成像模块,即使用者可通过红外热成像图直接判断管道内部的能量分布情况及管道是否存在明显的泄露问题,以便及时对存在安全隐患的管道进行维修更换。
5.可以根据管道特征灵活组装机器人,在直管时可以不安装方向调节气囊组即可保证机器人的稳定运动,使得机器人运动更加轻便;在需要机器人快速运动时可将两个行走驱动件直接连接,增加前进运动的伸长量;在具有复杂的管道如需要拐弯的管道情况下,可以在机器人头部安装方向调节气囊组,实现机器人运动方向的灵活改变。
6.本发明的机器人成本低,气囊和波纹管的制备成本低,其它结构如连接头、功能模块等也是结构简单,成本相对较低。
附图说明
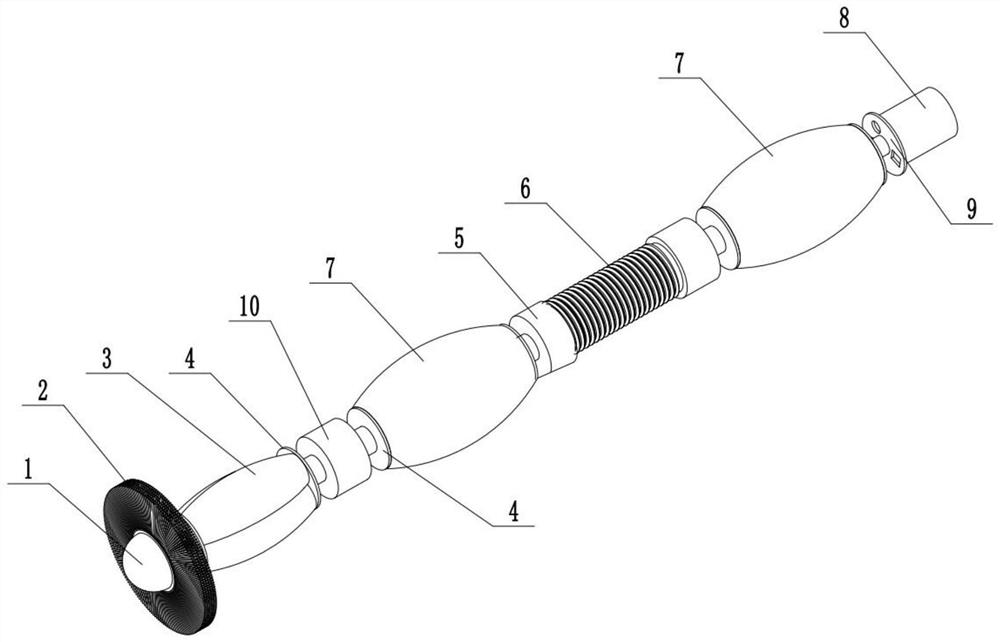
图1为本发明的整体结构示意图;
图2为本发明的二号连接头的结构示意图;
图3为本发明的一号连接头的结构示意图;
图4为本发明的方向调节气囊组的结构示意图;
图5为本发明的清洁毛刷的结构示意图;
图6为本发明的行走状态图;
图7为本发明的转向示意图;
图8为本发明的另一种结构示意图;
图9为本发明的控制原理图;
图中:1-摄像头;2-清洁毛刷;3-方向调节气囊组;4-一号连接头;5-二号连接头;6-行走驱动件;7-固定气囊;8-气泵;9-安装座;10-连接环;11-管道;
31-椭球形气囊A;32-椭球形气囊B;33-椭球形气囊C;41-连接盘;42-螺柱;51-连接头本体;52-伸出部。
具体实施方式
下面结合实施例及其附图详细叙述本发明的技术方案,并不用于限定本申请的保护范围。
本发明为一种用于管道的气动软体机器人(简称机器人,参见图1-9),包括功能模块、气泵8、方向调节气囊组3、行走驱动件6、进气管、出气管和两个固定气囊7;
行走驱动件6的两端分别与两个固定气囊7的一端连接,气泵8安装在一个固定气囊7的另一端;方向调节气囊组3的一端通过连接环10与另一个固定气囊7的另一端连接,功能模块安装在方向调节气囊组3的另一端;方向调节气囊组3用于调节机器人的运动方向,功能模块用于实现管道检测、清洁、信息采集等功能;
行走驱动件6的两端封闭,内部中空,且能够随着充、放气而伸长、缩短;方向调节气囊组3包含至少三个椭球形气囊,每个椭球形气囊与相邻的椭球形气囊相互紧连在一起,各个椭球形气囊的膨胀和收缩运动相互独立,通过所有椭球形气囊的协调运动实现机器人的转向;
进气管和出气管依次贯穿所有的固定气囊7和行走驱动件6,进气管的一端以及出气管的一端分别引出与方向调节气囊组3的椭球形气囊数量相同的延伸部,保证每个椭球形气囊内均含有一个进气管的延伸部和一个出气管的延伸部;进气管和出气管在行走驱动件6、各个固定气囊7以及各个椭球形气囊的内部分别通过三通接头安装有气动电磁阀,三通接头的两个接口与气管连接,三通接头的另一个接口安装气动电磁阀,进气管上的气动电磁阀用于控制进气,出气管上的气动电磁阀用于控制出气;进气管的另一端与气泵8的输出端连接,出气管的另一端位于机器人外部,用于释放气体;当进气管上的气动电磁阀打开时,来自气泵8的气体通过进气管向相应的气囊或行走驱动件6内充气;当出气管上的气动电磁阀打开时,相应气囊或行走驱动件6内部与机器人外部空间连通,为了保持压强恒定,相应气囊或行走驱动件6内的气体向外扩散,使相应气囊或行走驱动件6收缩完成放气。
行走驱动件6的两端分别设有二号连接头5,二号连接头5包括设有内螺纹的连接头本体51,连接头本体51的一端设有伸出部52,伸出部52具有内螺纹;连接头本体51与行走驱动件6端部螺纹连接,伸出部52与一号连接头4连接,实现行走驱动件6与固定气囊7的连接;
固定气囊7以及方向调节气囊组3的两端分别设有一号连接头4,一号连接头4包括连接盘41和位于连接盘41端面上的螺柱42;其中,与固定气囊7连接的连接盘41与固定气囊7的端部固连,螺柱42与相应的二号连接头5的伸出部52螺纹连接,实现固定气囊7与行走驱动件6的连接。
所述功能模块包括温湿度传感器、酸碱度传感器、摄像头1或清洁毛刷2等功能器件,温湿度传感器和酸碱度传感器固定在安装盘上,安装盘固定在方向调节气囊组3端部的一号连接件4的螺柱42上,用于检测管道内的温度、湿度以及酸碱度;摄像头1固定在安装盘的端面上,用于采集管道内的图像信息;清洁毛刷2套装在安装盘的周向上,清洁毛刷2为软毛,在机器人行进过程中自动清洁管道内壁上的垃圾;上述所有用电部件均通过电源总线供电,电源总线与供电电池连接,供电电池固定在安装气泵8的固定气囊7上。
所述功能模块上还包括红外热成像模块,通过红外热成像模块采集管道的红外热成像图,使用者可通过红外热成像图判断管道内部的能量分布情况及管道是否存在明显的泄露问题,以便及时对存在安全隐患的管道进行维修更换。
所述方向调节气囊组3包含椭球形气囊A31、椭球形气囊B32和椭球形气囊C33三个椭球形气囊,三个椭球形气囊相互紧连在一起,相邻两个椭球形气囊之间的夹角为120°;椭球形气囊的长度为75mm,最大直径为25mm。
所述行走驱动件6为波纹管,具有伸展能力强、易驱动的特点,波纹管的直径为40mm,长度为50mm。
所述固定气囊7的中部粗,两端细,其长度为200mm,最大直径为80mm;固定气囊7和方向调节气囊组3的椭球形气囊均采用高摩擦系数柔性效果好的橡胶制成,使机器人能够自适应管道的管径变化,依靠惯性实现被动弯曲;在转向时则通过方向调节气囊组3实现主动转向。
该机器人的功能模块、气泵8、方向调节气囊组3、行走驱动件6和固定气囊7均属于模块化结构,可以实现部件之间的快速拆装,方便维修和更换;如图8所示,为提高机器人的运动速度,可以在方向调节气囊组3和与方向调节气囊组3相连的固定气囊7之间增加行走驱动件6,使行走驱动件6每次的伸长量增加,进而提高机器人的运动速度。
该机器人还包括微控制器和开关量模块,微控制器通过TTL转换模块连接通讯总线,通讯总线连接有多个开关量模块,保证每个行走驱动件6、固定气囊7以及椭球形气囊内均含有一个开关量模块,每个开关量模块分别与相应的两个气动电磁阀连接;
微控制器的控制信号通过通讯总线传输给开关量模块,开关量模块的输出信号作用在相应的气动电磁阀上,控制相应气动电磁阀的开闭,进而控制行走驱动件6和相应气囊的收缩与膨胀,实现机器人相应的运动;例如,当行走驱动件6需要充气膨胀时,微控制器的控制信号传输至位于行走驱动件6内部的开关量模块,开关量模块的输出信号作用在进气管上位于行走驱动件6内的气动电磁阀上,气动电磁阀打开,进气管中的气体进入行走驱动件6中,使行走驱动件6充气伸长,以实现机器人前进运动。
摄像头采集管道图像,并将图像信息通过摄像头自带的无线传输模块传送至数据处理终端,数据处理终端存储有图像处理程序,能够根据管道图像信息识别管道的直径变化和弯道,并将处理结果通过物联网传输给微控制器,微控制器生成控制信号,控制相应的气动电磁阀充放气,以实现机器人的自适应或转向功能;
微控制器内存储有机器人运动控制程序:
开始运动时,位于机器人尾部的固定气囊7充气膨胀并保持膨胀状态,使与气泵8连接的固定气囊8与管道11内壁紧密贴合;行走驱动件6充气伸长并保持伸长状态,实现机器人的前进;然后位于方向调节气囊组3和行走驱动件6之间的固定气囊7充气膨胀并保持膨胀状态,使位于方向调节气囊组3和行走驱动件6之间的固定气囊7与管道11内壁紧密贴合,同时与气泵8连接的固定气囊7放气收缩至自然状态;行走驱动件6放气缩短至自然状态,以此完成机器人一个行走周期的前进;然后位于方向调节气囊组3和行走驱动件6之间的固定气囊7放气收缩至自然状态,机器人进入下一个行走周期,以此完成机器人的蠕动前进,此过程为直线行走状态,方向调节气囊组3不工作;
当机器人运动到管道11的岔口处,方向调节气囊组3的邻近转向方向的椭球形气囊保持自然状态,远离转向方向的椭球形气囊充气膨胀并挤压邻近转向方向的椭球形气囊,当远离转向方向的椭球形气囊内的气压足够大时,方向调节气囊组整体偏向邻近转向方向的一侧,行走驱动件充气伸长使机器人的头部完成转向;当机器人的头部完成转向后,机器人继续蠕动前进,实现机器人尾部的被动转向,进而完成整个机器人的转向运动。
温湿度传感器和酸碱度传感器采集的数据通过自带的无线数据传输模块(蓝牙模块或WiFi模块)传输至数据处理终端,实现管道环境信息采集功能,同时方便观测管道内部环境情况。
所述开关量模块为485开关量模块,TTL转换模块为TTL转485模块,微控制器为STM32单片机;数据处理终端为上位机、云平台或平板电脑等;摄像头1的型号为OpenMV3Cam M7。
本发明的工作原理和工作流程:
图6为本发明机器人的行走状态图,图6(a)为机器人的初始状态,方向调节气囊组3、行走驱动件6和固定气囊7均处于自然状态;方向调节气囊组3为机器人头部,与气泵8连接的固定气囊7为机器人尾部;
当机器人开始运动时,位于机器人尾部的固定气囊7充气膨胀并保持膨胀状态,使位于机器人尾部的固定气囊7与管道内壁紧密贴合,实现机器人的固定,如图6(b);行走驱动件6充气,使行走驱动件6向前进方向伸长并保持伸长状态,实现机器人的前进,如图6(c);然后位于方向调节气囊组3和行走驱动件6之间的固定气囊7充气膨胀并保持膨胀状态,使位于方向调节气囊组3和行走驱动件6之间的固定气囊7与管道内壁紧密贴合,同时位于机器人尾部的固定气囊7放气收缩至自然状态,如图6(d);行走驱动件6放气,使行走驱动件6缩短至自然状态,至此完成机器人一个行走周期的前进,如图6(e)所示;然后位于方向调节气囊组3和行走驱动件6之间的固定气囊7放气收缩至自然状态,机器人进入下一个行走周期,以此完成机器人的蠕动前进,此过程为直线行走状态,方向调节气囊组3不工作;
图7为机器人的转向状态示意图,图7(a)为机器人在管道内的直行状态图,椭球形气囊A31和椭球形气囊C33邻近转向方向,椭球形气囊B32远离转向方向;当机器人运动到管道11的岔口处,椭球形气囊A31和椭球形气囊C33保持自然状态,椭球形气囊B32充气膨胀并挤压椭球形气囊A31和椭球形气囊C33,当椭球形气囊B32内的气压足够大时,方向调节气囊组3整体偏向椭球形气囊A31和椭球形气囊C33的一侧,同时行走驱动件6充气伸长使机器人的头部完成左转向,如图7(b);当机器人的头部完成左转向后,机器人继续蠕动前进,实现机器人尾部的被动左转向,进而完成整个机器人的左转向,如图7(c)。
本发明未述及之处适用于现有技术。
- 一种用于管道的气动软体机器人
- 一种用于侦查搜救的气动式软体机器人