一种工业机器人的示教方法
文献发布时间:2023-06-19 11:09:54
技术领域
本发明涉及一种工业机器人的示教方法,属于机器人技术领域。
背景技术
现有工业机器人的示教是采用面板式示教器,通过面板或按钮选择工业机器人各个关节,再通过按键或手轮发送脉冲控制机器人某个关节到若干个位置,每个位置要按键记录坐标,且基本都是单轴控制运动,然后生成复合运动轨迹。
在实际使用中,这种示教方法对于运动轨迹复杂的操作就会非常费时,因此,迫切需要一种能方便快速示教的方法和设备。
发明内容
本发明为了解决当前技术中存在的问题,提供一种能方便快速示教工业机器人的设备和方法。
为达到上述目的,本发明所采用的技术手段是:一种工业机器人的示教方法,以工业机器人各机械臂长度同比缩放设计带阻尼调节的无动力机械臂式示教器,在无动力机械臂式示教器各关节处均设置角度传感器、电子微调器、阻尼器和阻尼调节,通过双手自由移动示教器的各臂位置,带动各关节角度传感器给出角度数据,形成驱动工业机器人按操作者设计的位置或轨迹,通过阻尼调节限制关节的运动速度或开关,自由的控制欲驱动部分的关节联动,快速实现工业机器人的示教操作。
进一步的,所述无动力机械臂式示教器包括控制单元,若干角度传感器、阻尼器和机械臂,其中若干机械臂连接构成工业机器人机械臂结构,若干阻尼器分别安装在机械臂的旋转关节连接处,角度传感器对应安装在阻尼器上,控制单元连接角度传感器。
更进一步的,所述阻尼器上安装阻尼调节器,在每个关节处安装角度电子微调,或在控制箱上安装角度电子微调,通过关节处的微调精确控制工业机器人机械臂的精准运动。
更进一步的,所述机械臂设置为伸缩结构臂。
更进一步的,所述角度电子微调为电位器或电子手轮或小量程角度传感器的一种或几种混用。
进一步的,所述无动力机械臂式示教器与面板式示教器配合使用,作为面板式示教器的扩展部件。
进一步的,所述无动力机械臂式示教器还包括一个位于底部的控制安装箱座,旋转轴角度传感器安装在控制安装箱座的平台面上,旋转轴阻尼器和旋转轴阻尼调节依次安装在旋转轴角度传感器上,各机械臂和角度传感器及阻尼器依次首尾连接,最下部的机械臂连接在旋转轴阻尼器上。
更进一步的,所述各机械臂和角度传感器及阻尼器依次首尾连接是指:L轴下臂的一端安装L轴下臂阻尼器和L轴下臂角度传感器,L轴下臂的另一端与U轴上臂连接,在连接处安装有U轴上臂阻尼调节、U轴上臂角度传感器,U轴上臂角度电子微调安装在U轴上臂角度传感器上,U轴上臂的另一端依次连接R轴手腕旋转角度电子微调、R轴手腕旋转角度传感器、R轴手腕旋转阻尼调节、R轴手腕旋转阻尼器、B轴手腕摆动角度传感器,T轴回转轴角度传感器、T轴回转轴电子微调、T轴回转轴阻尼器依次连接在B轴手腕摆动角度传感器上。
更进一步的,所述控制安装箱座上设置功能按键,功能按键连接控制单元,功能按键包括开始示教键,急停键,存储轨迹键,执行键。
更进一步的,所述控制安装箱座上还设置有显示屏,显示屏连接控制单元,用于显示轨迹文件的存储和调用的界面。
本发明与现有技术相比,有益技术效果是:
1、能快速实现单轴或多轴联动,快速实现复杂的运动轨迹操作示教;
2、可单独使用,也可以与面板式示教器配合使用,兼容性更强;
3、操作方法简单方便,上手快速,示教用时极大缩短。
附图说明
下面结合附图和实施例对本发明做进一步的阐述。
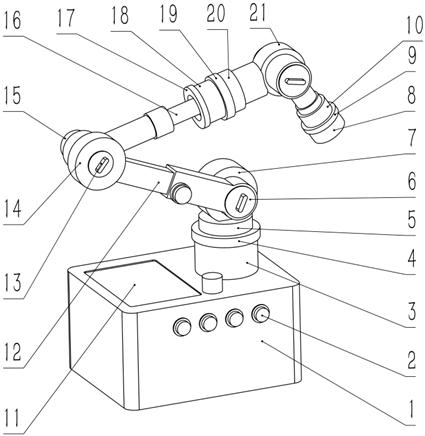
图1 本发明结构示意图;
图中:1、控制安装箱座,2、功能按键,3、旋转轴角度传感器,4、旋转轴阻尼调节,5、旋转轴阻尼器,6、L轴下臂阻尼器,7、L轴下臂角度传感器,8、T轴回转轴阻尼器,9、T轴回转轴电子微调,10、T轴回转轴角度传感器,11、显示屏,12、L轴下臂,13、U轴上臂阻尼调节,14、U轴上臂角度传感器,15、U轴上臂角度电子微调,16、U轴上臂,17、R轴手腕旋转角度电子微调,18、R轴手腕旋转角度传感器,19、R轴手腕旋转阻尼调节,20、R轴手腕旋转阻尼器,21、B轴手腕摆动角度传感器。
具体实施方式
实施例1
一种工业机器人的示教方法,以工业机器人各机械臂长度同比缩放设计带阻尼调节的无动力机械臂式示教器,在无动力机械臂式示教器各关节处均设置角度传感器、阻尼器和阻尼调节,通过双手自由移动示教器的各臂位置,从而带动各关节角度传感器给出的角度数据,驱动工业机器人灵活的按操作者的意图达到想要的位置或轨迹,通过阻尼调节限制关节的运动速度或开关,从而更自由的控制欲驱动部分的关节联动,快速实现工业机器人的示教操作。
通过本实施例子公开的方法,以人工通过双手自由移动无动力机械臂式示教器的各臂位置,从而带动各关节角度传感器给出角度数据,以这些角度数据驱动工业机器人灵活的按操作者的意图达到想要的位置或轨迹。
通过阻尼调节可以限制单个关节的运动速度或开关,从而可以更自由的控制想驱动部分的关节运动,且运动可以是多轴联动,因此,可以更快速实现工业机器人的示教操作,通过部分关节处的微调还可以精确控制工业机器人机械臂的精准运动。
实施例2
所述无动力机械臂式示教器包括控制单元,若干角度传感器、阻尼器和机械臂,其中若干机械臂连接构成工业机器人机械臂结构,若干阻尼器分别安装在机械臂的旋转关节连接处,角度传感器对应安装在阻尼器上,控制单元连接角度传感器。
作为优选,所述阻尼器上安装阻尼调节器。
作为优选,所述机械臂设置为伸缩结构臂,以增加对不同厂家所生产的机械臂长的兼容性。
作为优选,所述角度电子微调就近安装在各关节处,通过关节处的微调精确控制工业机器人机械臂的精准运动。
作为具体设计,所述角度电子微调可以是电位器或电子手轮或小量程角度传感器。
实施例3
作为实施例1的扩展,所述无动力机械臂式示教器与面板式示教器配合使用,作为面板式示教器的扩展部件。
所述无动力机械臂式示教器可以单独使用,也可以与面板式示教器配合使用,作为面板式示教器的扩展部件。无动力机械臂式示教器各关节处均设置角度传感器、阻尼器及阻尼调节,配合面板式示教器一起使用,作为面板式示教器的扩展部件。
实施例4
如图1所示,作为无动力机械臂式示教器的一种具体结构设计,所述无动力机械臂式示教器包括一个位于底部的控制安装箱座1。控制安装箱座1上设置功能按键2,功能按键2连接控制单元,功能按键包括开始示教键,急停键,存储轨迹键,执行键。控制安装箱座1上设置显示屏11,显示屏11连接控制单元,用于显示轨迹文件的存储和调用的界面。旋转轴角度传感器3安装在控制安装箱座1的平台面上,旋转轴阻尼器5和旋转轴阻尼调节4依次安装在旋转轴角度传感器3上,各机械臂和角度传感器及阻尼器依次首尾连接,最下部的机械臂连接在旋转轴阻尼器5上。图1中指示的六轴机械臂结构:L轴下臂12的一端安装L轴下臂阻尼器6和L轴下臂角度传感器7,L轴下臂12的另一端与U轴上臂16连接,在连接处安装有U轴上臂阻尼调节13、U轴上臂角度传感器14,U轴上臂角度电子微调15安装在U轴上臂角度传感器14上,U轴上臂16的另一端依次连接R轴手腕旋转角度电子微调17、R轴手腕旋转角度传感器18、R轴手腕旋转阻尼调节19、R轴手腕旋转阻尼器20、B轴手腕摆动角度传感器21,T轴回转轴角度传感器10、T轴回转轴电子微调9、T轴回转轴阻尼器8依次连接在B轴手腕摆动角度传感器上。
通过上述实施例能看出,本发明与现有技术相比,能快速实现单轴或多轴联动,快速实现复杂的运动轨迹操作示教;可单独使用,也可以与面板式示教器配合使用,兼容性更强;操作方法简单方便,上手快速,示教用时极大缩短。
上述实施例子是用于说明本发明方法的具有示例,不能作为对本发明的限制,凡是本领域技术人员在本发明基础上的无创造性的变更或替换,都属于本发明保护范围。
- 一种基于移动工业机器人示教器的示教系统及其示教方法
- 工业机器人示教方法和示教文件制作方法及装置