一种工业机器人视觉识别控制系统及方法
文献发布时间:2023-06-19 11:17:41
技术领域
本发明涉及机器人技术领域,更具体地说,涉及一种工业机器人视觉识别控制系统及方法。
背景技术
随着自动化加工的日益普及,工业机器人的应用场合也越来越多;目前采用的工业机器人,在进行夹持工件时,由于工件定位存在的细微差异以及工件本身体型的细微差异,夹持位置以及夹臂的移动位移均十分的难以掌握,急需一种能够解决该问题的工业机器人视觉识别控制系统。
发明内容
本发明要解决的技术问题在于,针对现有技术的上述缺陷,提供一种工业机器人视觉识别控制系统,还提供了一种工业机器人视觉识别控制方法。
本发明解决其技术问题所采用的技术方案是:
构造一种工业机器人视觉识别控制系统,包括机械手爪、带动所述机械手爪移动的六轴机器人和控制主机,所述六轴机器人由所述控制主机控制运行;其中,所述机械手爪包括与所述六轴机器人连接安装的安装座,所述安装座上设置有安装板、带动所述安装板纵向移动的升降组件,和沿所述安装板的升降运动方向拍照识别的第一视觉识别组件;所述安装板的下表面设置有多个夹持臂以及多个一一对应带动所述夹持臂进行移动的夹持驱动机构;所述安装板呈圆环形,其内孔用于供所述第一视觉识别组件的拍照光线穿过;所述安装板的外侧表面设置有环形滑轨,所述环形滑轨上滑动连接有斜向下设置在所述夹持臂外侧的连接臂,所述连接臂的下端设置有朝向所述夹持臂上的夹持部分拍照的第二视觉识别组件;所述安装板上设置有带动所述连接臂沿所述环形滑轨滑动的驱动组件;所述升降组件、所述夹持驱动机构和所述驱动组件均与所述控制主机电连接并受其控制;所述第一视觉识别组件和所述第二视觉识别组件均与所述控制主机通讯连接。
本发明所述的工业机器人视觉识别控制系统,其中,所述升降组件包括设置在所述安装座上的带动所述安装板升降的第一丝杆组件,和驱动所述第一丝杆组件的第一丝杆电机;所述安装座上设置有多个为所述安装板导向的伸缩杆,所述伸缩杆的两端分别与所述安装座和所述安装板固定连接。
本发明所述的工业机器人视觉识别控制系统,其中,所述第一视觉识别组件设置在所述安装座上与所述安装板的内孔相正对的位置;多个所述伸缩杆均匀分布设置在所述第一视觉识别组件周围。
本发明所述的工业机器人视觉识别控制系统,其中,所述驱动组件包括与所述安装板同轴设置的转动圈,所述转动圈可自转设置在所述安装板的上表面;所述转动圈的外侧表面设置连接所述连接臂的上端的连接块;所述安装板上设置有带动所述转动圈自转的驱动轮和驱动所述驱动轮转动的驱动电机。
本发明所述的工业机器人视觉识别控制系统,其中,所述夹持驱动机构包括带动所述夹持臂进行移动的第二丝杆组件,和驱动所述第二丝杆组件的第二丝杆电机。
一种工业机器人视觉识别控制方法,根据上述的工业机器人视觉识别控制系统,其包括以下步骤:
第一步:控制主机根据预设参数驱动六轴机器人运动,带动机械手爪移动至待夹持工件上方;
第二步:第一视觉识别组件透过安装板的内孔对工件进行拍照,返送拍照信息至控制主机处进行图像识别,获取工件顶部图像中心位置坐标,根据中心位置坐标控制六轴机器人运动微调机械手爪横向位置;
第三步:第二视觉识别组件进行斜向下拍照,返送拍照信息至控制主机进行图像识别,获取工件的侧面的位置高度,而后控制主机根据该位置高度控制升降组件运行带动安装板下降至工件高度位置;
第四步:控制主机控制驱动组件运动,带动连接臂沿环形滑轨移动,移动中逐一对各夹持臂上夹持部至工件的侧面之间间隔处拍照,返送拍照信息至控制主机处进行图像识别,获取各夹持臂上夹持部至工件的侧面之间间隔的间距值;
第五步:控制主机根据多个间距值对应控制各夹持驱动机构运行,带动对应的夹持臂移动相应间距值对工件进行夹持。
本发明所述的工业机器人视觉识别控制方法,其中,所述第三步中,还包括方法:第二视觉识别组件重新拍照,进行下降高度位置确认,若到达预设的合适高度位置则进行下一步,若未到达预设的合适高度位置则重新进行高度调整。
本发明的有益效果在于:控制主机根据预设参数驱动六轴机器人运动,带动机械手爪移动至待夹持工件上方,第一视觉识别组件透过安装板的内孔对工件进行拍照,返送拍照信息至控制主机处进行图像识别,获取工件顶部图像中心位置坐标,根据中心位置坐标控制六轴机器人运动微调机械手爪横向位置,第二视觉识别组件进行斜向下拍照,返送拍照信息至控制主机进行图像识别,获取工件的侧面的位置高度,而后控制主机根据该位置高度控制升降组件运行带动安装板下降至工件高度位置,控制主机控制驱动组件运动,带动连接臂沿环形滑轨移动,移动中逐一对各夹持臂上夹持部至工件的侧面之间间隔处拍照,返送拍照信息至控制主机处进行图像识别,获取各夹持臂上夹持部至工件的侧面之间间隔的间距值,控制主机根据多个间距值对应控制各夹持驱动机构运行,带动对应的夹持臂移动相应间距值对工件进行夹持,从而能够使得工件的夹持位置以及夹持臂的移动位移均能够较为精确的控制,尤其适用于待夹持工件之间存在较大尺寸差异情况下的夹持处理,有益于提高生产效率。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将结合附图及实施例对本发明作进一步说明,下面描述中的附图仅仅是本发明的部分实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他附图:
图1是本发明较佳实施例的工业机器人视觉识别控制系统安装座与安装板连接结构示意图;
图2是本发明较佳实施例的工业机器人视觉识别控制系统安装板仰视图;
图3是本发明较佳实施例的工业机器人视觉识别控制方法流程图。
具体实施方式
为了使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例是本发明的部分实施例,而不是全部实施例。基于本发明的实施例,本领域普通技术人员在没有付出创造性劳动的前提下所获得的所有其他实施例,都属于本发明的保护范围。
本发明较佳实施例的工业机器人视觉识别控制系统,如图1所示,同时参阅图2和图3,包括机械手爪、带动机械手爪移动的六轴机器人(图中未显示) 和控制主机(图中未显示),六轴机器人由控制主机控制运行;机械手爪包括与六轴机器人连接安装的安装座1,安装座1上设置有安装板2、带动安装板 2纵向移动的升降组件3,和沿安装板2的升降运动方向拍照识别的第一视觉识别组件4;安装板2的下表面设置有多个夹持臂20以及多个一一对应带动夹持臂进行移动的夹持驱动机构21;安装板2呈圆环形,其内孔用于供第一视觉识别组件4的拍照光线穿过;安装板2的外侧表面设置有环形滑轨22,环形滑轨22上滑动连接有斜向下设置在夹持臂20外侧的连接臂5,连接臂5 的下端设置有朝向夹持臂上的夹持部分拍照的第二视觉识别组件6;安装板2 上设置有带动连接臂5沿环形滑轨22滑动的驱动组件7;升降组件3、夹持驱动机构21和驱动组件7均与控制主机电连接并受其控制;第一视觉识别组件 4和第二视觉识别组件6均与控制主机通讯连接;
控制主机根据预设参数驱动六轴机器人运动,带动机械手爪移动至待夹持工件上方,第一视觉识别组件4透过安装板2的内孔对工件进行拍照,返送拍照信息至控制主机处进行图像识别,获取工件顶部图像中心位置坐标,根据中心位置坐标控制六轴机器人运动微调机械手爪横向位置,第二视觉识别组件6 进行斜向下拍照,返送拍照信息至控制主机进行图像识别,获取工件的侧面的位置高度,而后控制主机根据该位置高度控制升降组件3运行带动安装板2 下降至工件高度位置,控制主机控制驱动组件7运动,带动连接臂5沿环形滑轨22移动,移动中(移动速度较慢或者拍照时可以停留,以获得较清晰拍摄画面)逐一对各夹持臂20上夹持部至工件的侧面之间间隔处拍照,返送拍照信息至控制主机处进行图像识别,获取各夹持臂20上夹持部至工件的侧面之间间隔的间距值,控制主机根据多个间距值对应控制各夹持驱动机构21运行,带动对应的夹持臂20移动相应间距值对工件进行夹持,从而能够使得工件的夹持位置以及夹持臂的移动位移均能够较为精确的控制,尤其适用于待夹持工件之间存在较大尺寸差异情况下的夹持处理,有益于提高生产效率。
优选的,升降组件3包括设置在安装座1上的带动安装板2升降的第一丝杆组件30,和驱动第一丝杆组件30的第一丝杆电机31;安装座1上设置有多个为安装板2导向的伸缩杆10,伸缩杆10的两端分别与安装座1和安装板2 固定连接;驱动升降方便,且稳定性好。
优选的,第一视觉识别组件4设置在安装座1上与安装板2的内孔相正对的位置;多个伸缩杆10均匀分布设置在第一视觉识别组件4周围;稳定性好,结构合理且紧凑,多个伸缩杆10还能够对第一视觉识别组件提供一定的防护。
优选的,驱动组件7包括与安装板2同轴设置的转动圈70,转动圈70可自转设置在安装板2的上表面;转动圈70的外侧表面设置连接连接臂5的上端的连接块71;安装板2上设置有带动转动圈70自转的驱动轮72和驱动驱动轮转动的驱动电机73;通过驱动电机带动驱动轮转动,进而带动转动圈自转,进而通过连接块71带动连接臂5沿环形滑轨22转动;其中,转动圈与安装板的可自转连接采用现有的轨道连接结构即可。
优选的,夹持驱动机构21包括带动夹持臂20进行移动的第二丝杆组件 210,和驱动第二丝杆组件210的第二丝杆电机211;驱动夹持方便,且稳定性好,控制精度高。
一种工业机器人视觉识别控制方法,根据上述的工业机器人视觉识别控制系统,如图3所示,其包括以下步骤:
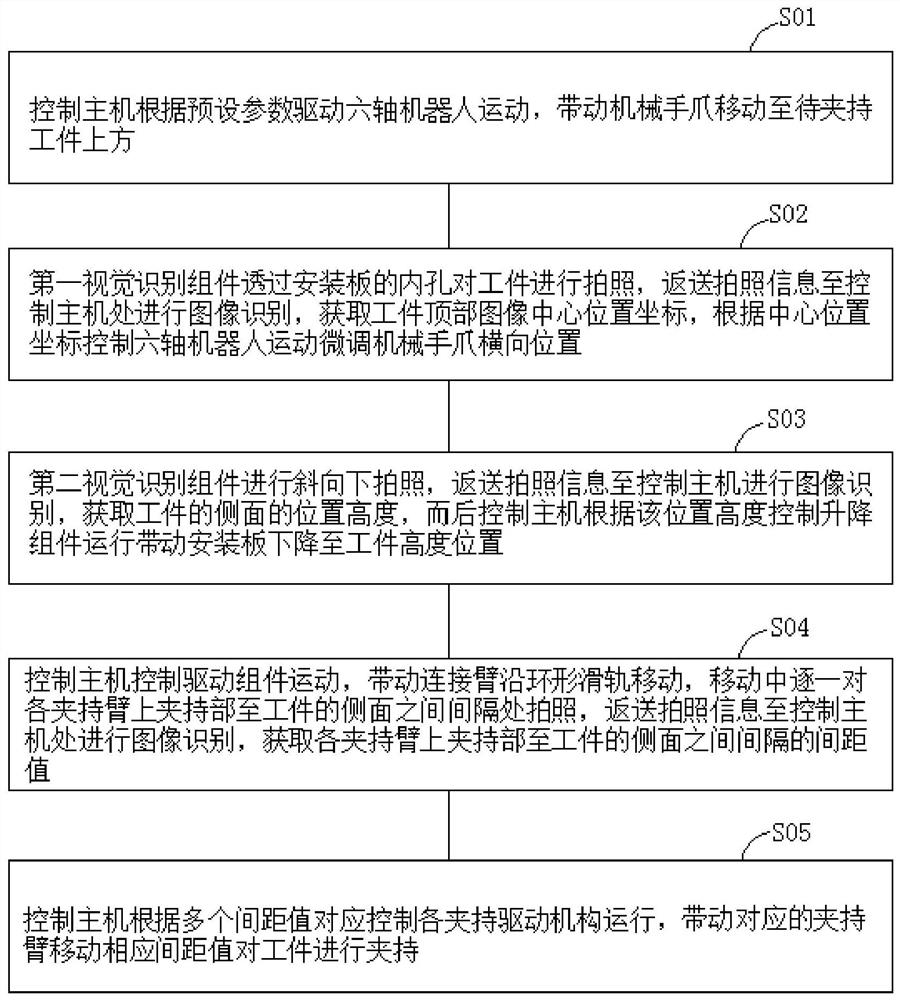
S01:控制主机根据预设参数驱动六轴机器人运动,带动机械手爪移动至待夹持工件上方;
S02:第一视觉识别组件透过安装板的内孔对工件进行拍照,返送拍照信息至控制主机处进行图像识别,获取工件顶部图像中心位置坐标,根据中心位置坐标控制六轴机器人运动微调机械手爪横向位置;
S03:第二视觉识别组件进行斜向下拍照,返送拍照信息至控制主机进行图像识别,获取工件的侧面的位置高度,而后控制主机根据该位置高度控制升降组件运行带动安装板下降至工件高度位置;
S04:控制主机控制驱动组件运动,带动连接臂沿环形滑轨移动,移动中逐一对各夹持臂上夹持部至工件的侧面之间间隔处拍照,返送拍照信息至控制主机处进行图像识别,获取各夹持臂上夹持部至工件的侧面之间间隔的间距值;
S05:控制主机根据多个间距值对应控制各夹持驱动机构运行,带动对应的夹持臂移动相应间距值对工件进行夹持;
能够使得工件的夹持位置以及夹持臂的移动位移均能够较为精确的控制,尤其适用于待夹持工件之间存在较大尺寸差异情况下的夹持处理,有益于提高生产效率。
优选的,S03中,还包括方法:第二视觉识别组件重新拍照,进行下降高度位置确认,若到达预设的合适高度位置则进行下一步,若未到达预设的合适高度位置则重新进行高度调整;便于能够较为准确的进行高度位置的定位。
应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
- 一种工业机器人视觉识别控制系统及方法
- 一种提高工业机器人三维视觉识别精度的匹配矫正方法