一种激光导航叉车式AGV车载系统及方法
文献发布时间:2023-06-19 11:22:42
技术领域
本发明涉及无人激光叉车控制领域,特别涉及一种无人激光叉车的车载系统及方法。
背景技术
随着仓储物流自动化的快速发展和国内人口红利的消失,自动导引车(AutomatedGuided Vehicle,AGV)凭借其效率高、灵活性强等优点逐渐成为智慧物流系统的重要组成部分。其中,叉车式AGV作为代表,不仅可以实现物料搬运功能,而且可以实现物料堆垛的功能,基本完全替代人力,实现自动化。目前,市场上主流的激光叉车AGV是以电动叉车为主体,将激光雷达等传感器安装在电动叉车主体上,并在周围环境加装反光板等光学辅助装置,协助激光雷达进行定位,进而实现对AGV的控制。但是存在以下问题:
1、现有的激光导航叉车式AGV安装反光板的定位方式对周围环境要求较高,反光板易被污染,周围物体的反射率对激光雷达定位的准确性有一定的影响,由于反光板安装的要求,在室外使用受限,且多采用单一传感器定位,躲避动态障碍物能力较差。
2、现有的AGV路径规划方法多存在路径搜索时间长,冗余节点多等问题,影响AGV的工作效率。且对于多AGV的调度,存在路口拥堵等问题。
3、只是将各类传感器安装在叉车主体上,其车载系统主要用于接收信息和发送指令,并没有将激光SLAM模块、路径规划模块、运动控制模块等做集成,可移植性较差。
发明内容
为了解决现有技术中存在的技术问题,本发明提出了一种激光导航叉车式AGV车载系统及控制方法,具有集成度高和架构精简等优势。
本发明采用的技术方案如下:
第一方面,本发明的实施例提供了一种激光导航叉车式AGV车载系统,包括电动叉车本体,在电动叉车本体上设有车载主控制器、定位导航模块、路径规划模块、安全避障模块、声光报警模块、运动执行模块、自动充电模块、无线通讯模块和任务管理调度模块;
所述的车载主控制器为工控机,定位导航模块、路径规划模块、安全避障模块、声光报警模块、运动执行模块、自动充电模块、无线通讯模块分别与主控制器连接;其中所述的定位导航模块摒弃传统的反光板定位方式,采用激光SLAM方式描述周围环境,并融合IMU、轮式里程计、摄像头等传感器信息,完成建图和AGV叉车自身定位。
路径规划模块可进行碰撞检测,计算AGV叉车和周围障碍物之间的距离,用于为AGV规划一条从起始位置到目标工位的最短无碰撞路径。
安全避障模块采用硬件和软件相结合,接触式防护和非接触式防护配合的二级联合防护措施,包括车头部加装的2台专业性激光避障扫描仪,三区域防护模式,一个保护区两个警告区,车尾货叉尖部安装的避障检测光电,车头加装的保险杠和避障接触开关和货叉尖部加装的接触开关;
声光报警模块用于出现故障时的报警提示。
运动执行模块用AGV的行走、转向和货叉抬升下降,采用电液混合驱动方式,货叉抬升采用液压控制。
自动充电模块用于为车载电池充电,提高AGV工作效率。无线通讯模块用于与远程控制中心之间的数据通讯,起到数据传输,数据中转作用。
任务调度模块用于多台AGV的任务管理调度。整体系统基于ROS操作系统。
第二方面,基于上述系统,本发明实施例还提供了一种方法,其中,定位导航模块的建图方法如下:
步骤1:系统通过IMU采集速度和加速度信息,通过姿态解算、互补滤波完成对AGV自身姿态的初步估计;
步骤2:通过轮式里程计采集速度信息完成AGV的航迹推算从而进行AGV自身位置估计,融合姿态估计与位置估计完成位姿估计;
步骤3:多线激光雷达采用点云分割匹配技术,基于点云片段和分类出的目标的方法,建立周围环境的点云描述模型,并与估计的位姿进行扫描匹配得到匹配后的位姿;
步骤4:摄像头进行标志位姿和标志尺寸的识别;
步骤5:与激光雷达匹配位姿动态加权得到高精度位姿;
步骤6:输出位姿到中心控制器调整车轮的转速和转角;
步骤7:判断是否到达目标任务点,若到达则导引完成,若未到达,则开始下一个扫描周期。
进一步的,所述的路径规划模块对路径进行规划的方法如下:
步骤1:首先根据地图精度划分栅格;
步骤2:将起始点加入开放列表;
步骤3:以起始点为中心向8个方向搜索节点;
步骤4:将满足条件的跳点加入开放列表;
步骤5:寻找开放列表中最小值的栅格点记为X点;
步骤6:判断X是否为目标点,若为目标点,则结束路径搜索,若不是目标点,则将X点从开放列表中删除,将X点加入关闭列表;
步骤7:可向直线方向和斜线方向寻找节点,当两个方向都可以扩展时,优先进行直线方向的扩展,先完成直线方向的扩展再进行对角线方向的扩展;搜索直线方向或对角线方向上的第一个跳点N;
步骤8:将N点在关闭列表中删除;
步骤9:判断N点是否在开放列表中,若不在,则将N点加入开放列表,若在,则更新N点在开放列表中的值,再进行下一轮搜索;
步骤10:当搜索完成后,遍历关闭列表中的节点,将所有的节点依次连在一起,便得到最终路径。根据最终生成的路径,运用导航框架,输出速度信息,可实现AGV的运动控制。
上述本发明的实施例的有益效果如下:
本发明提出的激光导航叉车式AGV车载系统及控制方法,改进相关算法,具有集成度高和架构精简等优势。摒弃传统的反光板的定位建图方法,采用SLAM算法,并融合IMU、里程计和摄像头等传感器数据,提高激光定位精度,提高环境适应性,扩展了AGV的工作范围。改进相关路径规划算法,减少了路径搜索节点,缩短了路径搜索时间,提高了AGV自主导航效率。提出新的AGV多机调度方法,有效缓解路口拥堵问题,避免冲突的同时减少绕路现象。
附图说明
构成本发明的一部分的说明书附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。
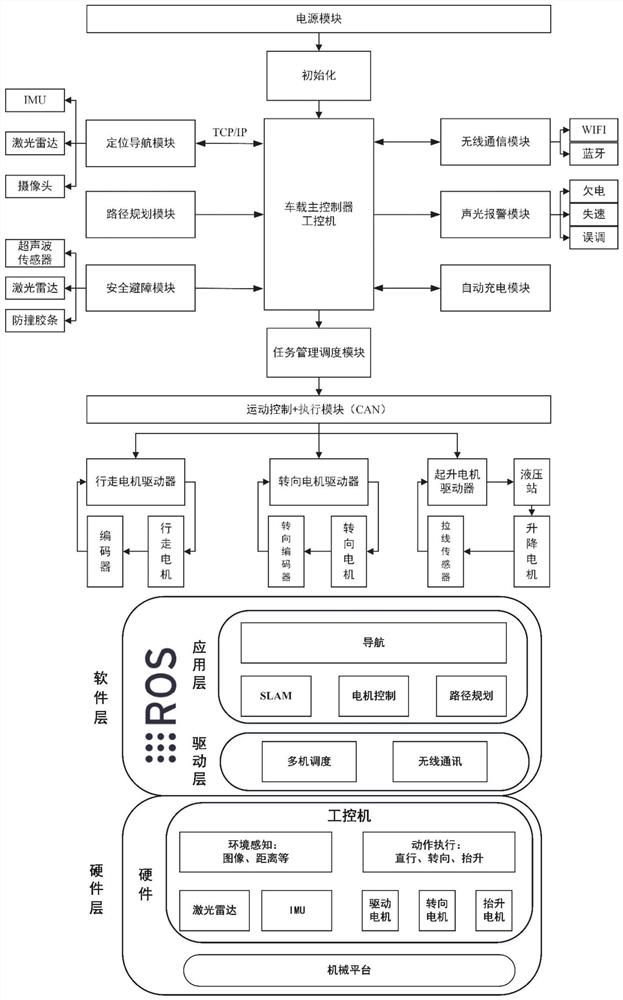
图1是本发明整体系统框架结构示意图;
图2是本发明定位建图模块流程图;
图3是本发明路径规划模块流程图;
图4是本发明避障模块流程图;
图5是本发明自动充电模块流程图;
图6是本发明运动控制模块流程图;
图7是本发明管理调度流程图。
具体实施方式
应该指出,以下详细说明都是例示性的,旨在对本发明提供进一步的说明。除非另有指明,本发明使用的所有技术和科学术语具有与本发明所属技术领域的普通技术人员通常理解的相同含义。
需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本发明的示例性实施方式。如在这里所使用的,除非本发明另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合;
正如背景技术所介绍的,现有技术中存在的不足,为了解决如上的技术问题,本发明提出了一种激光导航叉车式AGV车载系统及控制方法。
本发明的一种典型的实施方式中,如图1、图2所示,本实施例中公开了一种激光导航叉车式AGV车载系统,包含电动叉车本体,在电动叉车车体上设有车载主控制器、定位导航模块、路径规划模块、安全避障模块、声光报警模块、运动执行模块、自动充电模块、无线通讯模块和任务管理调度模块。
其中车载主控制器为工控机,定位导航模块、路径规划模块、安全避障模块、声光报警模块、运动执行模块、自动充电模块、无线通讯模块分别与主控制器连接;其中,定位导航模块摒弃传统的反光板定位方式,采用激光SLAM方式描述周围环境,并融合IMU、轮式里程计、摄像头等传感器信息,完成建图和AGV叉车自身定位。
路径规划模块可进行碰撞检测,计算AGV叉车和周围障碍物之间的距离,用于为AGV规划一条从起始位置到目标工位的最短无碰撞路径。
安全避障模块采用硬件和软件相结合,接触式防护和非接触式防护配合的二级联合防护措施,包括车头部加装的2台专业性激光避障扫描仪,三区域防护模式,一个保护区两个警告区,车尾货叉尖部安装的避障检测光电,车头加装的保险杠和避障接触开关和货叉尖部加装的接触开关。
声光报警模块用于出现故障时的报警提示。
运动执行模块用AGV的行走、转向和货叉抬升下降,采用电液混合驱动方式,货叉抬升采用液压控制。自动充电模块用于为车载电池充电,提高AGV工作效率。
无线通讯模块用于与远程控制中心之间的数据通讯,起到数据传输,数据中转作用。任务调度模块用于多台AGV的任务管理调度。整体系统基于ROS操作系统。
定位导航模块摒弃传统的反光板定位方式,采用激光SLAM方式描述周围环境,并融合IMU、轮式里程计、摄像头等传感器信息,完成建图和AGV叉车自身定位。路径规划模块可进行碰撞检测,计算AGV叉车和周围障碍物之间的距离,用于为AGV规划一条从起始位置到目标工位的最短无碰撞路径。安全避障模块采用硬件和软件相结合,接触式防护和非接触式防护配合的二级联合防护措施,包括车头部加装的2台专业性激光避障扫描仪,三区域防护模式,一个保护区两个警告区,车尾货叉尖部安装的避障检测光电,车头加装的保险杠和避障接触开关和货叉尖部加装的接触开关。声光报警模块用于出现故障时的报警提示。运动执行模块用AGV的行走、转向和货叉抬升下降,采用电液混合驱动方式,货叉抬升采用液压控制。自动充电模块用于为车载电池充电,提高AGV工作效率。无线通讯模块用于与远程控制中心之间的数据通讯,起到数据传输,数据中转作用。任务调度模块用于多台AGV的任务管理调度。整体系统基于ROS操作系统。
其中,激光雷达建图定位模块区别于传统的单线激光雷达建图,且摒弃反光板建图的方式,采用多线激光雷达建图方法,具体包括以下步骤:
步骤1:系统通过IMU采集速度和加速度信息,通过姿态解算、互补滤波等完成对AGV自身姿态的初步估计,
步骤2:通过轮式里程计采集速度信息完成AGV的航迹推算从而进行AGV自身位置估计,融合姿态估计与位置估计完成位姿估计;
步骤3:多线激光雷达采用点云分割匹配技术,基于点云片段和分类出的目标的方法,建立周围环境的点云描述模型,并与估计的位姿进行扫描匹配得到匹配后的位姿,
步骤4:摄像头进行标志位姿和标志尺寸的识别,
步骤5:与激光雷达匹配位姿动态加权得到高精度位姿,
步骤6:输出位姿到中心控制器调整车轮的转速和转角,
步骤7:判断是否到达目标任务点,若到达则导引完成,若未到达,则开始下一个扫描周期。
从而实现多传感器融合定位建图,实时反馈AGV的运行位姿信息,保证AGV的正常行走,并保持一定的精度。其流程如图2所示。
进一步的,本实施例中路径规划模块用于为AGV规划从起始位置到目标工位的无碰撞路径,为解决现有路径规划方法存在的路径搜索时间长,搜索冗余节点较多等问题,应用一种新的路径规划方法,不再采用传统的逐点判断的方式,以起始点为中心向周围四个方向或八个方向扩张计算,而是选择关键点作为跳跃点,采用跳跃点判断的方式,以起始点为中心根据规则挑选符合条件的跳点,并以原跳点和新跳点的方向为下一次搜索方向搜索跳点,直至到达终点,省去了传统算法中对非关键节点的计算判断环节,提高了算法效率。其流程如图3所示。算法维护了开放列表和关闭列表两个节点列表,开放列表中存放未遍历的节点,关闭列表中存放已经遍历过的节点,具体步骤如下:
步骤1:首先根据地图精度划分栅格;
步骤2:将起始点加入开放列表;
步骤3:以起始点为中心向8个方向搜索节点;
步骤4:将满足条件的跳点加入开放列表;
步骤5:寻找开放列表中最小值的栅格点记为X点;
步骤6:判断X是否为目标点,若为目标点,则结束路径搜索,若不是目标点,则将X点从开放列表中删除,将:X点加入关闭列表;
步骤7:可向直线方向和斜线方向寻找节点,当两个方向都可以扩展时,优先进行直线方向的扩展,先完成直线方向的扩展再进行对角线方向的扩展。搜索直线方向或对角线方向上的第一个跳点N;
步骤8:将N点在关闭列表中删除;
步骤9:判断N点是否在开放列表中,若不在,则将N点加入开放列表,若在,则更新N点在开放列表中的值,再进行下一轮搜索;
步骤10:当搜索完成后,遍历关闭列表中的节点,将所有的节点依次连在一起,便得到最终路径。根据最终生成的路径,运用导航框架,输出速度信息,可实现AGV的运动控制。
进一步的,本实施例中的安全避障模块采用硬件和软件二级联合防护措施,分为接触式和非接触式两类。第一级安全系统采用多种非接触式传感器,包括在车头加装两台专业性激光避障扫描仪,激光扫描仪的扫描角度为270度,分别安装在车头两角处,刚好覆盖车身周围区域,没有安全死角。在车尾货叉尖部加装避障检测光电,在货叉根部加装货到位检测光电。第二级采用接触式安全系统,包括在车头加装保险杠,并在保险杠后加装拉线开关,在车尾货叉尖部加装接触开关,在门架上端加装限高接触开关等。若警示区检测到障碍物,则减速慢行,若停止区检测到障碍物。则立即停止,若未检测到周围有障碍物,则AGV叉车仍保持工作状态,若防撞胶条触碰到障碍物,立即停止作业,其流程图如图4所示,具体步骤如下:
步骤1:避障系统开始工作;
步骤2:激光雷达警示区是否检测到障碍物,若检测到障碍物,则减速慢行,若未检测到障碍物,则继续正常作业;
步骤3:激光雷达停止区是否检测到障碍物,若未检测到障碍物,则继续正常作业,若检测到障碍物,则立即停车;
步骤4:检测障碍物是否移开,若移开,则继续正常工作,若未移开,则保持停在原地;
步骤5:超声波传感器是否检测到障碍物,若未检测到障碍物,则正常作业,若检测到障碍物,则立即停止作业,
步骤6:检测障碍物是否移开,若移开,则继续正常工作,若未移开,则保持停在原地;
步骤7:防撞胶条是否检测到障碍物,若未检测到障碍物,则继续正常工作,若检测到障碍物,则立即停车;
步骤8:检测障碍物是否移开,若移开,则继续正常工作,若未移开,则保持停在原地。
进一步的,本实施例中,自动充电模块,通过检测电池I/O口来检测电池电量控制与充电刷板的接触器,从而控制充电的通断。运行过程中车载充电电刷与电池断开,只有当AGV到达充电站后AGV上的控制器才会闭合接触器,是车载充电电刷与电池接通,侧面电极板与充电桩连在一起。自动充电模块流程如图6所示,步骤如下:
步骤1:检测AGV当前状态;
步骤2:若为空闲状态,检测AGV电量是否低于50%,若低于50%,则到充电桩充电,若高于50%,则在停止区待命;
步骤3:检测是否充电两小时或者电池电量高于95%,若高于95%,则行驶至停止区待命;若未高于95%,则继续充电;
步骤4:若为工作状态,检测AGV电量是否低于30%,若低于30%,则完成一个周期工作后到充电桩充电;若不低于30%,则继续工作,工作结束后到停止区待命;
步骤5:判断是否充电一小时或电量高于95%,若高于95%,则行驶至停止区待命;若不高于95%,则继续充电。
进一步的,本实施例中运动执行模块用于自动控制叉车的动作,主要由驱动单元和执行单元组成,包括直行、转向、货叉升降等运动控制。其运动控制流程如图6所示。
步骤1:AGV进入待命状态;
步骤2:是否有任务呼叫,若无任务呼叫,则在停止区待命,若有任务呼叫,则判断工位方向;
步骤3:若在起始工位,则为出工位方向,若从左侧出,则先后退慢行,再后退左转,再加速后退;若从右侧出,则先后退慢行,再后退右转,再加速后退。
步骤4:进入目标工位时,若从左侧进入,则先减速慢行,再从后退转到前进,再前进左转;若从右侧进入,则先减速慢行,再从后退转到前进,再前进右转;
步骤5:判断是否到达指定工位,若未到达指定工位,则控制器指令调整;若到达指定工位,则先停车,再执行货叉动作;
步骤6:判断货叉动作是否完成,若货叉未到位,则控制器指令调整;若货叉到位,则进行下一个周期工作。
进一步的,本实施例中,AGV充当系统的执行者,完成货物的周转搬运,AGV需要工作在任务管理调度模块的监督下,本系统采用wifi无线通讯,任务管理模块与AGV之间构成星型网络连接,主要完成AGV任务的合理分配、AGV行走规划、交通管制等功能,同时还具备监督设备运行状态等功能。系统动态调度流程图如下图所示。主要思想是:若为同向冲突,则判断两台AGV之间的车距,若AGV车距小于安全距离,则减速后车或加速前车,若是相向冲突,则判断两台AGV谁先进入到冲入区,当已经有一辆AGV进入到冲突区,则让另一辆AGV在冲突区外停车等待,直到已经进入到冲突区的AGV离开冲突区为止。程序循环运行,即可实现对AGV系统的动态调度,具体步骤如下:
步骤1:上位机开始AGV状态监听;
步骤2:上位机发布任务指令;
步骤3:判断该任务在任务队列中的优先级;
步骤4:为任务分配合适的AGV;
步骤5:AGV开始工作,判断当前AGV是否处于冲突区前3米范围内,若不在,则AGV继续以正常速度行驶;
步骤6:若当前AGV处于冲突区前3米范围内,则继续判断冲突类型,判断是否为同向冲突,若为同向冲突,则判断冲突区中两车之间的距离是否小于安全距离,若不小于安全距离,则当前AGV以正常速度行驶,若小于安全距离,则继续判断当前AGV是否在另一辆AGV前方,若在前方,则加速当前AGV,若在后方,则减速当前AGV;
步骤7:若不是同向冲突,则判断是否为相向冲突,若不是相向冲突,则当前AGV以正常速度行驶;若为相向冲突,则判断两辆AGV位置,若当前AGV先进入冲突区且另一台AGV在冲突区前2米内,若在两米内,则急停另一辆AGV;若另一台AGV先于当前AGV进入冲突区且当前AGV在冲突区前两米内,则急停当前AGV;若另一台AGV先于当前AGV进入冲突区且已经离开冲突区,则取消当前AGV急停,否则当前AGV以正常速度行驶。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种激光导航叉车式AGV车载系统及方法
- 一种混合激光导航叉车式AGV小车