一种用于铝合金圆铸锭的机械抓手
文献发布时间:2023-06-19 11:24:21
技术领域:
本发明涉及一种机械抓手,尤其涉及一种用于铝合金圆铸锭的机械抓手。
背景技术:
利用机械手替代手工操作完成各种规律性动作已非常普遍,且取得了良好的效果。在工业生产中,机械手几乎可以完全替代人进行物料的装卸、搬运等操作,甚至还可以完成很多人力无法实现的动作,这不仅减少了人力成本,消除了安全隐患,而且极大的提高了工作效率,受到业界一致好评。目前机械手在工业生产中的应用特点主要是结构复杂,动作笨重,灵巧性较差,无法实现对距离较远且空间狭小的物料进行操作,这样在抓取距离较远且空间狭小处的物料时仍需要人工操作,效率较低,不利于产能的进一步提高。为适应不同形状的工件,尤其是圆柱形工件的抓取,往往需要快速找到工件中心点,以便抓手能在工件的中心点位置进行抓取,使得抓取动作更加稳定,防止工件在抓取过程中掉落。
发明内容:
本发明是为了解决上述现有技术存在的问题而提供一种用于铝合金圆铸锭的机械抓手,其能够更方便、快速、准确的抓取在圆铸锭的圆弧面上,从而使得抓取更可靠。
本发明所采用的技术方案有:一种用于铝合金圆铸锭的机械抓手,包括固定支架以及枢转连接于固定支架左右两侧的左夹爪和右夹爪,所述固定支架包括上板体以及下板体,所述左夹爪和右夹爪均包括有枢转连接于上板体和下板体之间的上部夹爪以及枢转连接于下板体下方的下部夹爪,在所述上板体的上方安装有气缸,气缸的气缸轴连接于上板体上,上板体在气缸轴的驱动下上下移动。
进一步地,所述下部夹爪包括枢转连接于下板体上的下部夹爪主杆、与下部夹爪主杆的下末端焊接于一起的延长抓杆以及与延长抓杆的下末端焊接于一起的尾杆,所述尾杆沿着延长抓杆的下末端向内倾斜呈斜角结构。
进一步地,所述左夹爪和右夹爪均包括有前后排列的两根,前、后两根左夹爪上尾杆的下末端焊接有一根前后方向延伸的左下连接杆,前、后两根右夹爪上尾杆的下末端焊接有一根前后方向延伸的右下连接杆。
进一步地,所述左下连接杆和右下连接杆的外表面为螺纹设计。
进一步地,在所述下板体的下方安装有感应灯。
本发明具有如下有益效果:
(1).在一定程度上减少了机械抓手的整机重量,降低机械抓手的成本,且为机械抓手的夹爪腾出了较大的可操作空间,方便了圆铸锭的抓取。
(2).在抓取过程中,可选用感应灯感应出圆铸锭的中心点,并使得夹爪靠近圆铸锭中心点,依靠夹爪的转动来夹紧圆铸锭。
附图说明:
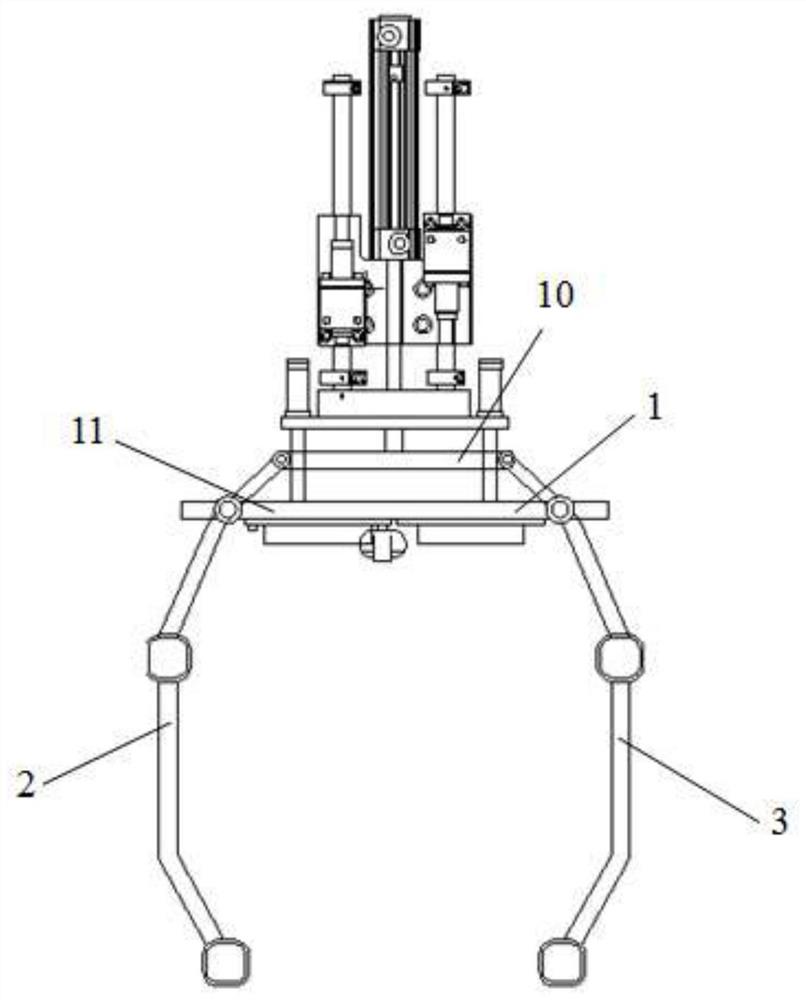
图1为本发明用于铝合金圆铸锭的机械抓手的结构剖面图。
图2为本发明用于铝合金圆铸锭的机械抓手中夹爪的结构主视图。
具体实施方式:
下面结合附图对本发明作进一步的说明。
本发明用于铝合金圆铸锭的机械抓手包括固定支架1以及枢转连接于固定支架1左右两侧的左夹爪2和右夹爪3,固定支架1包括上板体10以及下板体11,左夹爪2和右夹爪3均包括有枢转连接于上板体10和下板体11之间的上部夹爪以及枢转连接于下板体11下方的下部夹爪。在上板体10的上方安装有气缸,气缸的气缸轴连接于上板体10上,上板体10在气缸轴的驱动下可以上下移动。
下部夹爪包括枢转连接于下板体11上的下部夹爪主杆4、与下部夹爪主杆4的下末端焊接于一起的延长抓杆5以及与延长抓杆5的下末端焊接于一起的尾杆6。尾杆6沿着延长抓杆5的下末端向内倾斜呈斜角结构,能够增强夹爪和圆铸锭之间的抓力。
左夹爪2和右夹爪3均包括有前后排列的两根,前、后两根左夹爪2上下部夹爪主杆4与延长抓杆5连接的部位焊接有一根前后方向延伸的左上连接杆7。前、后两根右夹爪3上下部夹爪主杆4与延长抓杆5连接的部位焊接有一根前后方向延伸的右上连接杆8。
前、后两根左夹爪2上尾杆6的下末端焊接有一根前后方向延伸的左下连接杆9,前、后两根右夹爪3上尾杆6的下末端焊接有一根前后方向延伸的右下连接杆12。
左下连接杆9和右下连接杆12的外表面为螺纹设计,采用螺纹设计来加大夹爪和圆铸锭的摩擦阻力以降低脱落风险。
在下板体11的下方安装有感应灯4,通过感应灯感应出圆铸锭的中心点,并使得夹爪靠近圆铸锭中心点,依靠夹爪的转动来夹紧圆铸锭。
本发明左夹爪2和右夹爪3之间为中空设计,能够减少机械抓手的整机重量,降低机械抓手的成本。
本发明用于铝合金圆铸锭的机械抓手的工作原理如下:
气缸作为动力源带动上板体10上下移动,操作者使用叉车将铝合金圆铸锭运至上料架上,机械抓手接到上料信号,移动至上料工位,夹爪下降至指定位置,夹爪动作抓取铝棒,夹爪上升到最高点。机械抓手移动至圆铸锭下料工位,夹爪下降至最低点,将圆铸锭放置旋转托辊上,夹爪打开,夹爪上升至最高点,机械抓手平移至上料工位,等待下一循环工作。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下还可以作出若干改进,这些改进也应视为本发明的保护范围。
- 一种用于铝合金圆铸锭的机械抓手
- 一种用于确定铝合金圆铸锭头尾参考锯切量的方法