一种利用车厢扩容方法实现车载开关柜全周表面检测的装置
文献发布时间:2023-06-19 11:22:42
技术领域
本发明涉及电气开关柜检测的技术领域,具体的,涉及一种利用车厢扩容方法实现车载开关柜全周表面检测的装置。
背景技术
开关柜在厂家生产的过程中由于设备、环境、人为等因素影响不可避免会产生某些缺陷。这些缺陷除了不能很好发挥开关柜隔离保护等作用,还可能会对电网产生负面影响,进而造成事故。工作中需要对高、低压配电柜进行日常保养、一级维护、二级维护和进线开关的日常维护等方式进行维护。
为确保工作的安全性,需要对开关柜进行产品检测,检测车辆的使用实现了随检随走,使检测过程更加灵活便捷,以往常规开关柜检测车采用加大空间尺寸的方式来满足大型开关柜的检测,大型的开关柜检测车不但增加了驾驶难度,而且对于部分有限高限宽要求的路段更是无能为力。
发明内容
本发明的目的在于解决现有技术的问题,提供一种利用车厢扩容方法实现车载开关柜全周表面检测的装置。
本发明的目的通过以下技术方案予以实现:
一种利用车厢扩容方法实现车载开关柜全周表面检测的装置,包括可扩容车辆结构、用于安装检测器的四自由度移动平台和用于放置开关柜的旋转定位装置,以及控制所述机器人系统运作的控制中心;
(1)所述可扩容车辆结构包括车厢顶板、车厢侧板和车厢底板,所述车厢顶板通过至少 4个伸缩立柱支撑,所述伸缩立柱与车辆底架固定连接;所述车厢侧板呈“L”型,包括嵌套底板和侧板;所述车厢底板安装在车辆底架上,所述嵌套底板与车厢底板采用嵌套连接,通过侧板调整装置控制嵌套底板与车厢底板间的嵌套距离调节车厢宽度;所述车厢顶板包括车厢柱顶板和两侧的翼板,所述车厢柱顶板和两侧的翼板铰接,并设有翼板调整装置来调节翼板张开幅度;
(2)所述四自由度移动平台包括平行设置的第三水平移动导轨和第四水平移动导轨构成纵向水平直线导轨;所述第三水平移动导轨和第四水平移动导轨上的滑块设有横向水平移动导轨;垂直立柱导轨通过旋转气缸与横向水平移动导轨上的水平移动滑块连接;工业机器人安装在垂直立柱导轨的垂直移动滑块上;所述水平移动导轨和垂直立柱导轨上设有驱动滑块运动的伺服电机;工业机器人的操作端设有检测器;
(3)所述旋转定位装置包括齿轮回转支承、驱动齿轮回转支承的伺服电机和减速机、安装于齿轮回转支承上的检测平台,以及定位传感器。
进一步地,所述伸缩立柱、侧板调整装置、翼板调整装置为液压驱动,通过液压同步系统实现车厢的同步顶升和展开;所述液压同步系统采用PLC控制,PLC输出液压缸的控制参数经D/A转换、比例放大器后传输给比例阀,比例阀通过调控液压阀流量控制液压缸的移动速度,位移传感器采集各液压缸位移信息并反馈给PLC,从而实现液压同步系统的闭环控制。
进一步地,所述检测平台安装于齿轮回转支承上,由伺服电机和减速机驱动齿轮回转支承,带动检测平台转动。
进一步地,所述定位传感器分别检测平台的四个方位,通过分析所述的定位传感器间的相对坐标关系,实现检测平台的定位。
进一步地,所述检测平台包括动力滚筒组件;所述动力滚筒组件包括两台相对设置在边框上的伺服电机、以及一排两端活动设置在边框上的滚筒。
进一步地,所述滚筒的两个端部设有齿轮,所述滚筒之间的齿轮相互啮合,滚筒的齿轮与伺服电机的齿轮啮合,由伺服电机驱动。
进一步地,相邻滚筒之间的齿轮分别为与滚筒刚性连接和活动连接,实现所有滚筒有相同的转动方向。
进一步地,所述车厢顶板包括车厢柱顶板和两侧的翼板,所述车厢柱顶板和两侧的翼板铰接,并设有翼板调整装置来调节翼板张开幅度。
进一步地,所述伸缩立柱包括一组相互嵌套的立柱外壳和设置在立柱外壳内的液压缸,所述液压缸的一端与车厢顶板连接,另一端与车辆底架连接。
进一步地,所述车厢底板为双层中空结构,所述嵌套底板嵌套于双层中空结构中,通过侧板调整装置进行车厢宽度方向的调整。
进一步地,侧板调整装置为液压缸,所述液压缸的缸体与车厢底板固定连接,活塞杆与嵌套底板连接,驱动嵌套底板运动。
进一步地,所述车厢侧板侧面呈阶梯型,并与翼板相配合;行车时,所述翼板与所述车厢侧板拼接为一体;扩容过程,所述翼板始终搭接在所述车厢侧板上。
进一步地,所述齿轮回转支承、伺服电机和减速机设置于底座上,所述底座固定设置在车辆的车厢底板。
进一步地,所述检测平台通过底板安装于齿轮回转支承上,所述底板与齿轮回转支承的内圈固定连接。
与现有技术相比,本发明具有以下技术效果:
本发明可扩容车辆结构大大扩展了车厢内部的工作空间,在解决了部分道路车辆限高限宽难题的同时提升了行车的灵活性。同时,给不同朝向检测提供的旋转开关柜的空间。
为了实现开关柜的全周表面检测,本发明通过设置旋转定位装置,驱动开关柜在车厢内部的旋转得以实现。
本发明通过四自由度移动平台能够快速高效建立开关柜表面的三维可视化模型,进而准确判断出开关柜综合性能较差的地方,解决了人工现场对开关柜进行扫描测量的难题,省时省力且有针对性地对其进行检测和再投入使用,以期保证开关柜的正常工作。
附图说明
图1为可扩容车辆结构的开启结构示意图;
图2为行驶状态车辆示意图;
图3为同步顶升和展开装置原理图;
图4为液压同步控制系统结构;
图5为检测旋转定位装置的结构示意图;
图6为图5中D部分的局部放大图;
图7为检测旋转定位装置的示意图;
图8为开关柜检测过程示意图;
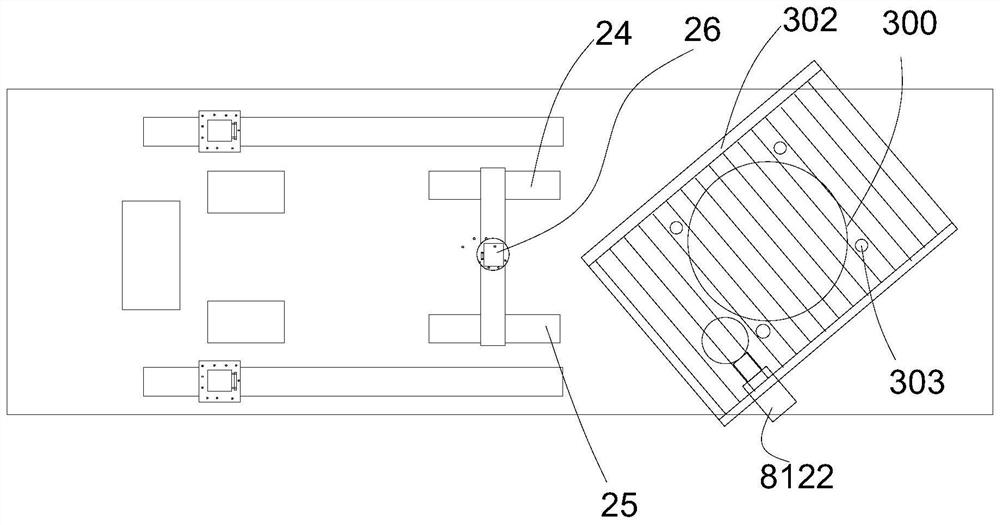
图9为四自由度移动平台示意图;
图10为车载开关柜全周表面检测的装置示意图。
具体实施方式
下面对本发明的具体实施方式作进一步说明。在此需要说明的是,对于这些实施方式的说明用于帮助理解本发明,但并不构成对本发明的限定。
如附图1~4所示,
一种利用车厢扩容方法实现车载开关柜全周表面检测的装置,包括可扩容车辆结构、用于安装检测器的四自由度移动平台和用于放置开关柜的旋转定位装置,以及控制所述机器人系统运作的控制中心。
可扩容车辆结构包括车厢顶板9、车厢侧板100和车厢底板200,车厢顶板9通过至少4 个伸缩立柱91支撑,伸缩立柱91与车辆底架201固定连接;车厢侧板100呈“L”型,包括嵌套底板101和侧板102;车厢底板200安装在车辆底架上,嵌套底板101与车厢底板200 采用嵌套连接,通过控制嵌套底板101与车厢底板200间的嵌套距离调节车厢宽度。
车厢顶板9包括车厢柱顶板92和两侧的翼板93,车厢柱顶板92和两侧的翼板93铰接,并设有翼板调整装置94来调节翼板93张开幅度。
伸缩立柱91包括一组相互嵌套的立柱外壳和设置在立柱外壳内的液压缸95,液压缸95 的一端与车厢顶板9连接,另一端与车辆底架201连接。
车厢底板200为双层中空结构,嵌套底板101嵌套于双层中空结构中,通过侧板调整装置103进行车厢宽度方向的调整。
侧板调整装置103为液压缸,液压缸的缸体与车厢底板固定连接,活塞杆104与嵌套底板101连接,驱动嵌套底板101运动。
车厢侧板100侧面呈阶梯型,并与翼板93相配合;行车时,翼板93与车厢侧板100拼接为一体;扩容过程,翼板93始终搭接在车厢侧板100上。
车辆底架201上设有至少4个用于支撑车辆以及调整车厢底板水平度的车辆支撑机构 202。车辆支撑机构202包括设置液压油缸的支撑腿。
用于开关柜检测的可扩容车辆结构还包括水平检测仪表(未示出)。
伸缩立柱91、侧板调整装置103、翼板调整装置94为液压驱动,通过液压同步系统实现车厢的同步顶升和展开;
液压同步系统采用PLC控制,PLC输出液压缸的控制参数经D/A转换、比例放大器后传输给比例阀,比例阀通过调控液压阀流量控制液压缸的移动速度,位移传感器采集各液压缸位移信息并反馈给PLC,从而实现液压同步系统的闭环控制。
如图9~10所示,四自由度移动平台包括平行设置的第三水平移动导轨24和第四水平移动导轨25构成纵向水平直线导轨;
第三水平移动导轨24和第四水平移动导轨25上的滑块设有横向水平移动导轨26;
垂直立柱导轨3通过旋转气缸32与横向水平移动导轨26上的水平移动滑块21连接;
工业机器人4安装在垂直立柱导轨3的垂直移动滑块上31;
水平移动导轨2和垂直立柱导轨3上设有驱动滑块运动的伺服电机。伺服电机与控制中心连接。
控制中心获取检测器的信息并进行处理,并控制该装置的运行等。
开关柜放置于检测旋转定位装置上。
如附图5~8所示,基于伺服驱动的车载开关柜检测旋转定位装置,包括齿轮回转支承300、驱动齿轮回转支承300的伺服电机8122和减速机305、检测平台302,以及定位传感器303;
检测平台302安装于齿轮回转支承300上,由伺服电机8122和减速机驱动齿轮回转支承 300,带动检测平台302转动;
定位传感器303分别检测平台的四个方位,通过分析的定位传感器303之间的相对坐标关系,实现检测平台302的定位;
检测平台302包括动力滚筒组件812;动力滚筒组件812包括两台相对设置在边框上的伺服电机8122、以及一排两端活动设置在边框上的滚筒8123;
滚筒8123的两个端部设有齿轮,滚筒8123之间的齿轮相互啮合,滚筒8123的齿轮与伺服电机8122的齿轮啮合,由伺服电机8122驱动;相邻滚筒8123之间的齿轮分别为与滚筒刚性连接307和活动连接308,实现所有滚筒8123有相同的转动方向。活动连接308为齿轮通过轴承设置在滚筒8123上。
齿轮回转支承300、伺服电机8122和减速机305设置于底座304上,底座304固定设置在车辆的车厢底板。
伺服电机8122驱动减速机305,减速机305连接齿轮,齿轮与齿轮回转支承300的齿轮啮合。
检测平台302通过底板306安装于齿轮回转支承300上,底板与齿轮回转支承300的内圈固定连接。
滚筒8123的两端通过轴承平行设置与侧板上。
伺服电机8122设置在边框的同一端部,并实现相同的转动方向。
检测平台302具有4×90°四个旋转姿态,实现开关柜四个面的连续检测。
本基于伺服驱动的车载开关柜检测机器人系统旋转定位装置使用时,其原理是:检测平台302下的齿轮回转支承300在伺服电机8122的带动下实现检测平台302的转动,检测平台 302具有4×90°的转动姿态,依靠四个定位传感器303的相对坐标关系进行检测平台302的定位,从而确保检测平台302每个位置姿态的准确性。
应用时:首先通过动力滚筒组件812自动调整将开关柜移动到待检测位置,供后期进行检测。
定位传感器303根据相对坐标关系发出检测平台302的定位信息,并进行开关柜1号侧面的检测,1号侧面检测完成后,伺服电机驱动检测平台302旋转90°,进行2号侧面检测,以此类推直到四个侧面全部完成检测。
工业机器人操作端安装三维激光扫描仪、三维扫描仪、CCD检测器、和/或材质检验仪。
以上对本发明的实施方式作了详细说明,但本发明不限于所描述的实施方式。对于本领域的技术人员而言,在不脱离本发明原理和精神的情况下,对这些实施方式进行多种变化、修改、替换和变型,仍落入本发明的保护范围内。
- 一种利用车厢扩容方法实现车载开关柜全周表面检测的装置
- 一种利用分集接收实现系统扩容的方法