一种车载开关柜自动检测的机器人系统
文献发布时间:2023-06-19 11:24:21
技术领域
本发明涉及电气开关柜检测的技术领域,具体的,涉及一种车载开关柜自动检测的机器人系统。
背景技术
在电力系统中高低压开关柜是必不可少的装置,高低压开关柜对整个电力系统的正常运行以及电力分配都有非常重要的影响。高低压开关柜的主要作用是在电力系统进行发电、输电、配电和电能转换的过程中,进行开合、控制和保护用电设备,广泛适用于发电厂、变电站、石油化工、冶金轧钢、轻工纺织、厂矿企业和住宅小区、高层建筑等各种不同场所。
然而,开关柜在厂家生产的过程中由于设备、环境、人为等因素影响不可避免会产生某些缺陷。这些缺陷除了不能很好发挥开关柜隔离保护等作用,还可能会对电网产生负面影响,进而造成事故。
因此,为了保证开关柜的生产质量,在投入使用前开关柜的检测工作必不可少。开关柜的检测通常是由人工完成的,由于开关柜质量大,工作环境危险,传统的人工检测的方式通常面临效率不高,工作环境恶劣的问题。
发明内容
本发明的目的在于解决现有技术的问题,提供一种车载开关柜自动检测的机器人系统。
本发明的目的通过以下技术方案予以实现:
一种车载开关柜自动检测的机器人系统,包括汽车车厢,和设置在汽车车厢底板上的开关柜柜门自动打开装置、用于安装检测器的四自由度移动平台和用于放置开关柜的旋转定位装置,以及控制所述机器人系统运作的控制中心;
(1)所述开关柜柜门自动打开装置包括安装于汽车车厢底板上的水平移动导轨和沿水平移动导轨运动的水平移动滑块、固定在水平移动滑块上的垂直立柱导轨和沿垂直立柱导轨运动的垂直移动滑块、安装在垂直移动滑块上的工业机器人,所述工业机器人的操作端连接真空吸盘装置;
(2)所述水平移动导轨包括平行设置的第一水平移动导轨和第二水平移动导轨;
所述四自由度移动平台包括与第一水平移动导轨并排的第三水平移动导轨,与第二水平移动导轨并排的第四水平移动导轨;所述第三水平移动导轨和第四水平移动导轨上的滑块设有横向水平移动导轨;垂直立柱导轨通过旋转气缸与横向水平移动导轨上的水平移动滑块连接;
(3)所述旋转定位装置包括齿轮回转支承、驱动齿轮回转支承的伺服电机和减速机、安装于齿轮回转支承上的检测平台,以及定位传感器。
进一步地,所述真空吸盘装置包括连接法兰、通过弹性连接柱与连接法兰连接真空吸盘,所述弹性连接柱的两端连接气管和真空吸盘。所述弹性连接柱包括固定夹具、导向轴、套装在导向轴的凸缘面上的压缩弹簧,紧固螺栓通过固定夹具将导向轴连接在连接法兰上。所述真空吸盘通过球铰链与导向轴铰接。受到压力时,所述真空吸盘沿着导向轴伸缩运动。导向轴和球铰链的中空通孔连通,并分别与气管和真空吸盘连通。
进一步地,所述检测平台安装于齿轮回转支承上,由伺服电机和减速机驱动齿轮回转支承,带动检测平台转动。所述定位传感器分别检测平台的四个方位,通过分析所述的定位传感器间的相对坐标关系,实现检测平台的定位。
进一步地,所述检测平台包括动力滚筒组件。所述动力滚筒组件包括两台相对设置在边框上的伺服电机、以及一排两端活动设置在边框上的滚筒;
进一步地,所述滚筒的两个端部设有齿轮,所述滚筒之间的齿轮相互啮合,滚筒的齿轮与伺服电机的齿轮啮合,由伺服电机驱动。
进一步地,相邻滚筒之间的齿轮分别为与滚筒刚性连接和活动连接,实现所有滚筒有相同的转动方向。
进一步地,水平移动导轨和垂直立柱导轨上设有驱动滑块运动的伺服电机,所述伺服电机与控制中心连接。
进一步地,所述工业机器人通过螺栓连接固定在垂直移动滑块上,以限制机器人底座的垂直方向的运动。
进一步地,所述水平移动滑块设置有滑块座、止动块、限位装置、斜撑梢。
进一步地,所述工业机器人包括四轴机器人、五轴机器人或六轴机器人。
进一步地,工业机器人操作端安装三维激光扫描仪,和/或CCD检测器。
进一步地,汽车车厢底板上还设有三维空间跟踪定位器。
与现有技术相比,本发明具有以下技术效果:
本发明通过水平移动导轨和垂直立柱导轨为工业机器人提供两个方向的自由度,通过伺服驱动将工业机器人带至工件工作位置,根据工件信息完成特定轨迹的运动,进行运动学规划,控制真空吸盘吸住开关柜柜门,并完成开门动作。大大提高了电气柜检测中柜门打开效率和打开各种电气柜的适应性。
通过检测平台的动力滚筒组件能推动开关柜到指定检测位置,效率高和可靠性强等。
旋转定位装置的使用实现了开关柜不停机检测,同时还具有稳定性好,适应性强等优点。
附图说明
图1为柜门自动打开的装置结构示意图;
图2为真空吸盘装置的结构示意图;
图3为弹性连接柱的结构示意图;
图4为水平移动导轨的结构示意图;
图5为垂直立柱导轨的结构示意图;
图6为检测旋转定位装置的结构示意图;
图7为图6中D部分的局部放大图;
图8为检测旋转定位装置的示意图;
图9为开关柜检测过程示意图。
具体实施方式
下面对本发明的具体实施方式作进一步说明。在此需要说明的是,对于这些实施方式的说明用于帮助理解本发明,但并不构成对本发明的限定。
如附图1~5所示,
一种车载开关柜自动检测的机器人系统,包括汽车车厢,和设置在汽车车厢底板上的开关柜柜门自动打开装置、用于安装检测器的四自由度移动平台和用于放置开关柜的旋转定位装置,以及控制所述机器人系统运作的控制中心。
柜门自动打开的装置包括安装于底板1上的水平移动导轨2和沿水平移动导轨2运动的水平移动滑块21、固定在水平移动滑块21上的垂直立柱导轨3和沿垂直立柱导轨3运动的垂直移动滑块31、安装在垂直移动滑块31上的工业机器人4,工业机器人4的操作端连接真空吸盘装置5;
真空吸盘装置5包括连接法兰51、通过弹性连接柱52与连接法兰51连接真空吸盘53,弹性连接柱52的两端连接气管(未示出)和真空吸盘53。
连接法兰51通过连接柱54与工业机器人4的操作端连接。
水平移动导轨2和垂直立柱导轨3上设有驱动滑块运动的伺服电机,伺服电机与控制中心连接。
弹性连接柱52包括固定夹具521、导向轴522、套装在导向轴522的凸缘面上的压缩弹簧523,紧固螺栓通过固定夹具521将导向轴522连接在连接法兰51上;真空吸盘53通过球铰链531与导向轴522铰接;受到压力时,真空吸盘53沿着导向轴522伸缩运动。
导向轴522和球铰链531的中空通孔连通,并分别与气管(未示出)和真空吸盘53连通。
连接法兰51设有3个弹性连接柱52,弹性连接柱52之间圆周角为120°。
工业机器人4通过螺栓连接固定在垂直移动滑块31上,以限制机器人底座的垂直方向的运动。
水平移动导轨2与底板刚性连接。
水平移动滑块21设置有滑块座、止动块、限位装置、斜撑梢。
水平移动导轨2包括平行设置的第一水平移动导轨22和第二水平移动导轨23。
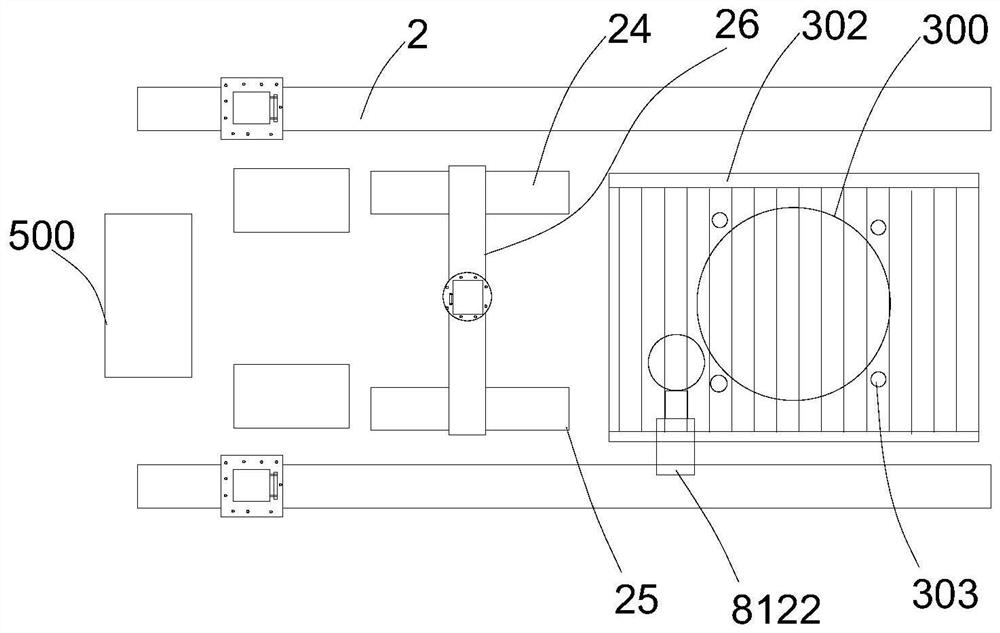
四自由度移动平台包括与第一水平移动导轨22并排的第三水平移动导轨24,与第二水平移动导轨23并排的第四水平移动导轨25;
第三水平移动导轨24和第四水平移动导轨25上的滑块设有横向水平移动导轨26。
垂直立柱导轨3通过旋转气缸32与横向水平移动导轨26上的水平移动滑块21连接。
工业机器人4包括四轴机器人、五轴机器人、六轴机器人。
基于真空吸盘的开关柜柜门自动打开的装置的打开方法,包括以下步骤:
S1.水平移动导轨2安装于底板1上,控制器(未示出)设定驱动器驱动水平移动滑块 21,控制工业机器人4与垂直立柱导轨3水平方向的移动;
S2.垂直立柱导轨3与水平移动导轨滑块21连接,控制器设定驱动器驱动垂直移动滑块 31,控制工业机器人4垂直方向的移动;
S3.工业机器人4与垂直立柱导轨滑块31连接,工业机器人4按照设定的运动轨迹,控制工业机器人操作端及真空吸盘53运动到工作点;
S4.真空吸盘53与开关柜接触,由气管形成负压压力吸住开关柜柜门,再由工业机器人4的姿态变化控制柜门的打开或关闭。
转定位装置包括齿轮回转支承300、驱动齿轮回转支承300的伺服电机8122和减速机 305、检测平台302,以及定位传感器303;
检测平台302安装于齿轮回转支承300上,由伺服电机8122和减速机驱动齿轮回转支承 300,带动检测平台302转动;
定位传感器303分别检测平台的四个方位,通过分析的定位传感器303之间的相对坐标关系,实现检测平台302的定位;
检测平台302包括动力滚筒组件812;动力滚筒组件812包括两台相对设置在边框上的伺服电机8122、以及一排两端活动设置在边框上的滚筒8123;
滚筒8123的两个端部设有齿轮,滚筒8123之间的齿轮相互啮合,滚筒8123的齿轮与伺服电机8122的齿轮啮合,由伺服电机8122驱动;相邻滚筒8123之间的齿轮分别为与滚筒刚性连接307和活动连接308,实现所有滚筒8123有相同的转动方向。活动连接308为齿轮通过轴承设置在滚筒8123上。
齿轮回转支承300、伺服电机8122和减速机305设置于底座304上,底座304固定设置在车辆的车厢底板。
伺服电机8122驱动减速机305,减速机305连接齿轮,齿轮与齿轮回转支承300的齿轮啮合。
检测平台302通过底板306安装于齿轮回转支承300上,底板与齿轮回转支承300的内圈固定连接。
滚筒8123的两端通过轴承平行设置与侧板上。
伺服电机8122设置在边框的同一端部,并实现相同的转动方向。
检测平台302具有4×90°四个旋转姿态,实现开关柜四个面的连续检测。
本基于伺服驱动的车载开关柜检测机器人系统旋转定位装置使用时,其原理是:检测平台302下的齿轮回转支承300在伺服电机8122的带动下实现检测平台302的转动,检测平台 302具有4×90°的转动姿态,依靠四个定位传感器303的相对坐标关系进行检测平台302的定位,从而确保检测平台302每个位置姿态的准确性。
应用时:首先通过动力滚筒组件812自动调整将开关柜移动到待检测位置,供后期进行检测。
定位传感器303根据相对坐标关系发出检测平台302的定位信息,并进行开关柜1号侧面的检测,1号侧面检测完成后,伺服电机驱动检测平台302旋转90°,进行2号侧面检测,以此类推直到四个侧面全部完成检测。
工业机器人操作端安装三维激光扫描仪、三维扫描仪、CCD检测器、和/或材质检验仪。
汽车车厢底板1上还设有三维空间跟踪定位器500。
以上对本发明的实施方式作了详细说明,但本发明不限于所描述的实施方式。对于本领域的技术人员而言,在不脱离本发明原理和精神的情况下,对这些实施方式进行多种变化、修改、替换和变型,仍落入本发明的保护范围内。
- 一种车载开关柜自动检测的机器人系统
- 一种用于开关柜母线表面材质自动检测的机器人系统