一种地面煤仓清仓用刚柔耦合机械臂及其使用方法
文献发布时间:2023-06-19 11:24:21
技术领域
本发明属于煤矿机械技术领域,特别是涉及一种地面煤仓清仓用刚柔耦合机械臂及其使用方法。
背景技术
地面煤仓是选煤厂针对原煤和产品煤进行储存的主要设施,通常为上下缩口结构,且底部下缩口为卸料口。地面煤仓在使用过程中,会不断的有原煤加入,而仓内的原煤又不断从卸料口流出,随着长期使用,会在仓壁的内表面形成一层挂壁煤,这些挂壁煤不但会堵塞卸料口,还会降低煤仓的储存量以及影响煤仓的出煤效率,并且挂壁煤长期滞留在仓壁上,还可能会出现自燃,这对安全会造成严重威胁。
因此,必须对地面煤仓进行定期清仓,而现阶段的清仓工作仍以人工清仓为主,但人工清仓存在劳动强度高、清仓效率低的缺点,由于煤仓中通常含有大量粉尘和有毒有害气体,清仓作业人员长时间处于这种恶劣的环境内,必然会对身体健康产生危害,而且人工清仓作业属于高空悬吊作业,作业危险性较高。为此,行业内逐步开展了利用机器人进行清仓的全新尝试,目前清仓机器人的设计主要以采用机械臂的形式为主,这些现有设计中多数采用的是全刚性机械臂,少量采用的是全柔性机械臂。对于全刚性机械臂来说,虽然其具有稳定性高、刚度大、强度高等优点,但也伴随着重量大、灵活性差、运输不便的缺点,而且全刚性机械臂很难进入煤仓内部,特别是针对卸料口等一些狭窄的仓内部位难以进行有效清理。对于全柔性机械臂来说,虽然其具有重量轻、体积小、整臂弯曲能力高、响应快等优点,但同时也伴随着稳定性差、清仓效果差的缺点。
发明内容
针对现有技术存在的问题,本发明提供一种地面煤仓清仓用刚柔耦合机械臂及其使用方法,同时具备了全刚性机械臂和全柔性机械臂的优点,而且克服了二者存在的缺点,当清仓机器人采用了本发明的刚柔耦合机械臂后,可以全面替代人工进行清仓作业,从而避免了人工清仓所带来的一系列问题。
为了实现上述目的,本发明采用如下技术方案:一种地面煤仓清仓用刚柔耦合机械臂,包括清仓大臂、清仓中臂、清仓小臂、第一动力关节、第二动力关节、第三动力关节及超声振动锤;所述清仓大臂的后端部通过第一动力关节与清仓机器人的本体相连接,清仓大臂的前端部通过第二动力关节与清仓中臂的后端部相连接,清仓中臂的前端部通过第三动力关节与清仓小臂的后端部相连接,所述超声振动锤同轴安装在清仓小臂的前端部。
所述清仓大臂、清仓中臂及清仓小臂结构相同,均包括后刚性臂、中间柔性臂及前刚性臂;所述后刚性臂、中间柔性臂及前刚性臂之间顺序且同轴固连在一起;所述清仓大臂的后刚性臂的后端部通过第一动力关节与清仓机器人的本体相连接,清仓大臂的前刚性臂的前端部通过第二动力关节与清仓中臂的后刚性臂的后端部相连接,清仓中臂的前刚性臂的前端部通过第三动力关节与清仓小臂的后刚性臂的后端部相连接,所述超声振动锤同轴安装在清仓小臂的前刚性臂的前端部。
所述中间柔性臂包括前转接接头、中间转接接头、后转接接头、球铰万向节及柔性臂弯曲驱动气囊;在所述中间柔性臂的外侧套装有波纹防护套管;所述中间转接接头、球铰万向节及柔性臂弯曲驱动气囊的数量均为若干,若干中间转接接头均布设置在前转接接头与后转接接头之间,在前转接接头与中间转接接头之间、相邻中间转接接头之间、后转接接头与中间转接接头之间均安装有球铰万向节和柔性臂弯曲驱动气囊;所述柔性臂弯曲驱动气囊设置在球铰万向节的外周侧,每个球铰万向节对应配置两个柔性臂弯曲驱动气囊,两个柔性臂弯曲驱动气囊相对于球铰万向节的圆心呈180°夹角,且所有的柔性臂弯曲驱动气囊在中间柔性臂上沿轴向呈两排分布,通过不同位置处柔性臂弯曲驱动气囊的充气膨胀和放气收缩来控制中间柔性臂的弯曲度;所述中间柔性臂通过前转接接头与前刚性臂相连接,中间柔性臂通过后转接接头与后刚性臂相连接。
所述的地面煤仓清仓用刚柔耦合机械臂的使用方法,包括如下步骤:
步骤一:将机械臂处于折叠状态的清仓机器人通过地面煤仓的顶部仓口下放到仓内,并将清仓机器人悬停在地面煤仓内的指定高度处;
步骤二:启动第一动力关节、第二动力关节及第三动力关节,同时调整清仓大臂、清仓中臂以及清仓小臂内的中间柔性臂的弯曲度,用以调整超声振动锤的空间位置,进而使超声振动锤与地面煤仓仓壁内表面的挂壁煤相接触;
步骤三:启动超声振动锤,在振动冲击作用下使附着在地面煤仓仓壁内表面的挂壁煤脱落,同时调整超声振动锤的空间位置,直至完成指定区域内的挂壁煤清除;
步骤四:将超声振动锤调整到远离地面煤仓仓壁内表面的位置处,然后整体下调清仓机器人的悬吊高度,直到清仓机器人悬停在地面煤仓内的下一级指定高度处;
步骤五:恢复超声振动锤与地面煤仓仓壁内表面挂壁煤的接触,之后按照步骤三继续执行挂壁煤清除工作;
步骤六:重复步骤四和步骤五,逐级向下进行挂壁煤的清除工作,直至完成地面煤仓最底层的卸料口处的挂壁煤清除工作;
步骤七:当地面煤仓最底层的卸料口处的挂壁煤完成清除后,将机械臂重新调整回折叠状态,最后将机械臂处于折叠状态的清仓机器人提升到地面煤仓外部。
本发明的有益效果:
本发明的地面煤仓清仓用刚柔耦合机械臂及其使用方法,同时具备了全刚性机械臂和全柔性机械臂的优点,而且克服了二者存在的缺点,当清仓机器人采用了本发明的刚柔耦合机械臂后,可以全面替代人工进行清仓作业,从而避免了人工清仓所带来的一系列问题。
附图说明
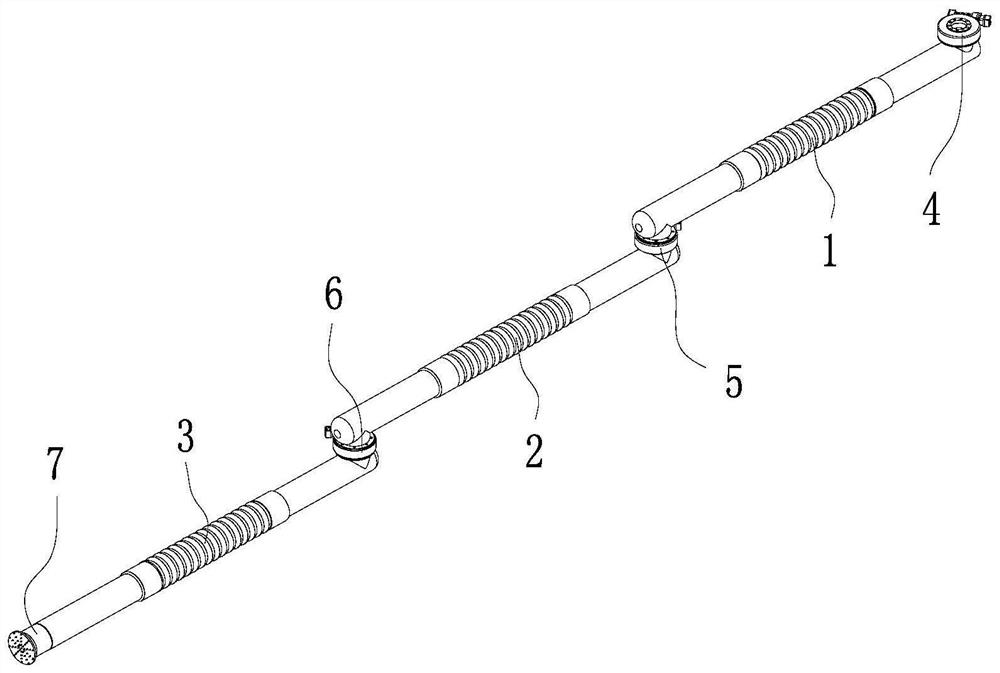
图1为本发明的一种地面煤仓清仓用刚柔耦合机械臂(中间柔性臂处于平直状态)的结构示意图;
图2为本发明的一种地面煤仓清仓用刚柔耦合机械臂(中间柔性臂处于弯曲状态)的结构示意图;
图3为本发明的清仓大臂/清仓中臂的结构示意图;
图4为本发明的清仓小臂的结构示意图;
图5为本发明的中间柔性臂的结构示意图;
图6为本发明的中间柔性臂(柔性臂弯曲驱动气囊未示出)的爆炸示意图;
图7为本发明的一种地面煤仓清仓用刚柔耦合机械臂由折叠状态变为展开状态的过程示意图;
图8为本发明的一种地面煤仓清仓用刚柔耦合机械臂在清理卸料口处挂壁煤时的示意图;
图中,1—清仓大臂,2—清仓中臂,3—清仓小臂,4—第一动力关节,5—第二动力关节,6—第三动力关节,7—超声振动锤,8—后刚性臂,9—中间柔性臂,10—前刚性臂,11—前转接接头,12—中间转接接头,13—后转接接头,14—球铰万向节,15—柔性臂弯曲驱动气囊,16—波纹防护套管。
具体实施方式
下面结合附图和具体实施例对本发明做进一步的详细说明。
如图1~8所示,一种地面煤仓清仓用刚柔耦合机械臂,包括清仓大臂1、清仓中臂2、清仓小臂3、第一动力关节4、第二动力关节5、第三动力关节6及超声振动锤7;所述清仓大臂1的后端部通过第一动力关节4与清仓机器人的本体相连接,清仓大臂1的前端部通过第二动力关节5与清仓中臂2的后端部相连接,清仓中臂2的前端部通过第三动力关节6与清仓小臂3的后端部相连接,所述超声振动锤7同轴安装在清仓小臂3的前端部。
所述清仓大臂1、清仓中臂2及清仓小臂3结构相同,均包括后刚性臂8、中间柔性臂9及前刚性臂10;所述后刚性臂8、中间柔性臂9及前刚性臂10之间顺序且同轴固连在一起;所述清仓大臂1的后刚性臂8的后端部通过第一动力关节4与清仓机器人的本体相连接,清仓大臂1的前刚性臂10的前端部通过第二动力关节5与清仓中臂2的后刚性臂8的后端部相连接,清仓中臂2的前刚性臂10的前端部通过第三动力关节6与清仓小臂3的后刚性臂8的后端部相连接,所述超声振动锤7同轴安装在清仓小臂3的前刚性臂10的前端部。
所述中间柔性臂9包括前转接接头11、中间转接接头12、后转接接头13、球铰万向节14及柔性臂弯曲驱动气囊15;在所述中间柔性臂8的外侧套装有波纹防护套管16;所述中间转接接头12、球铰万向节14及柔性臂弯曲驱动气囊15的数量均为若干,若干中间转接接头12均布设置在前转接接头11与后转接接头13之间,在前转接接头11与中间转接接头12之间、相邻中间转接接头12之间、后转接接头13与中间转接接头12之间均安装有球铰万向节14和柔性臂弯曲驱动气囊15;所述柔性臂弯曲驱动气囊15设置在球铰万向节14的外周侧,每个球铰万向节14对应配置两个柔性臂弯曲驱动气囊15,两个柔性臂弯曲驱动气囊15相对于球铰万向节14的圆心呈180°夹角,且所有的柔性臂弯曲驱动气囊15在中间柔性臂8上沿轴向呈两排分布,通过不同位置处柔性臂弯曲驱动气囊15的充气膨胀和放气收缩来控制中间柔性臂9的弯曲度;所述中间柔性臂9通过前转接接头11与前刚性臂10相连接,中间柔性臂9通过后转接接头13与后刚性臂8相连接。
所述的地面煤仓清仓用刚柔耦合机械臂的使用方法,包括如下步骤:
步骤一:将机械臂处于折叠状态的清仓机器人通过地面煤仓的顶部仓口下放到仓内,并将清仓机器人悬停在地面煤仓内的指定高度处;
步骤二:启动第一动力关节4、第二动力关节5及第三动力关节6,同时调整清仓大臂1、清仓中臂2以及清仓小臂3内的中间柔性臂9的弯曲度,用以调整超声振动锤7的空间位置,进而使超声振动锤7与地面煤仓仓壁内表面的挂壁煤相接触;
步骤三:启动超声振动锤7,在振动冲击作用下使附着在地面煤仓仓壁内表面的挂壁煤脱落,同时调整超声振动锤7的空间位置,直至完成指定区域内的挂壁煤清除;
步骤四:将超声振动锤7调整到远离地面煤仓仓壁内表面的位置处,然后整体下调清仓机器人的悬吊高度,直到清仓机器人悬停在地面煤仓内的下一级指定高度处;
步骤五:恢复超声振动锤7与地面煤仓仓壁内表面挂壁煤的接触,之后按照步骤三继续执行挂壁煤清除工作;
步骤六:重复步骤四和步骤五,逐级向下进行挂壁煤的清除工作,直至完成地面煤仓最底层的卸料口处的挂壁煤清除工作;
步骤七:当地面煤仓最底层的卸料口处的挂壁煤完成清除后,将机械臂重新调整回折叠状态,最后将机械臂处于折叠状态的清仓机器人提升到地面煤仓外部。
实施例中的方案并非用以限制本发明的专利保护范围,凡未脱离本发明所为的等效实施或变更,均包含于本案的专利范围中。
- 一种地面煤仓清仓用刚柔耦合机械臂及其使用方法
- 一种具有可变柔度方向的刚柔耦合装置和一种机械臂