一种基于误差修正的动平衡机去重量误差预测方法及系统
文献发布时间:2023-06-19 18:27:32
技术领域
本发明设计制动盘不平衡量平衡过程中去重量误差预测技术领域,尤其涉及一种基于误差修正的动平衡机去重量误差预测方法及系统。
背景技术
随着汽车产业的快速发展,车辆行驶的安全性也引起了人们更多的重视,在影响车辆行驶安全的众多因素中,制动性能的优劣占据着相当大的比重。在汽车制动系统的发展中,制动配置也在不断地发生着改变,逐渐从“前盘后毂”的传统设计变成“前盘后盘”的形式。制动盘的使用量迅速飙升,制动盘质量的优劣严重影响着车辆的使用性能以及驾驶的安全性和可靠性。
由于在制动盘的生产过程中使用材料质量、加工工艺以及加工环境等因素的影响,会造成制动盘本身出现质量分布不均匀的现象。这种在制动盘的高速旋转过程中因为质量分布不均匀产生的振动属于危害性振动,会严重影响到车辆的行驶安全以及车内人员的人身安全。
这种危害性振动的本质原因主要是:在车辆的行驶过程中制动盘会跟随车轮做高速的旋转运动,因其自身质量分布不均匀产生离心力是制动盘内部受力不平衡而产生振动,这种现象称为动不平衡现象,而不均匀的质量被称为不平衡量。针对不平衡量的问题主要是通过平衡检测和校正的工艺进行平衡,其中平衡检测指对制动盘存在的不平衡量的幅值和相位进行检测,而校正主要指在不平衡量检测完成后,通过去重的方式使制动盘达到平衡。
目前,动平衡机提高校正精度的研究大都集中在提高不平衡量的检测技术上,希望通过更精确的不平衡量检测技术提高制动盘的平衡精度。但是动平衡机的铣削去重系统也会由于刀具进给不足或者进给过量以及在铣削过程中夹紧机构提供的摩擦力不足使制动盘发生滑动等不可避免的因素影响去重精度,这是检测技术无法解决的问题。
发明内容
为了解决上述问题,本发明提出了一种基于误差修正的动平衡机去重量误差预测方法及系统,利用随机森林模型进行去重量误差预测,根据预测结果通过调整刀具的进给以及铣削角度对检测系统无法弥补的铣削误差进行补偿。
在实施方式中,采用以下技术方案:
一种基于误差修正的动平衡机去重量误差预测方法,包括:
数据获取模块,获取动平衡机的运行数据和制动盘数据;
模型预测模块,将上述数据输入训练完成的校正去重量误差预测模型进行预测;
数据输出模块,将模型输出的预测结果与动平衡机初检工位确定的去重量相加作为最终的制动盘去重量;
其中,去重量误差预测模型的训练数据集为动平衡机的历史运行数据和制动盘数据;将动平衡机历史运行数据和制动盘数据输入去重量误差预测模型,输出去重量误差预测值。
在另一些实施方式中,采用以下技术方案:
一种终端设备,包括存储器和处理器,存储器用于存放多条指令;处理器用于实现指令,上述指令适于由处理器加载并执行上述的基于误差修正的动平衡机去重量误差预测方法。
在另一些实施方式中,采用以下技术方案:
一种计算机可读存储介质,用于存储各个指令,上述指令由终端设备的处理器执行上述的基于误差修正的动平衡机去重量误差预测方法。
与现有技术相比,本发明的优势在于:
1、本发明利用集成学习算法里的随机森林模型建立去重量误差预测模型,弥补了动平衡机去重工位导致的校正误差无法进行补偿的缺点。
2、本发明利用去重量误差预测对动平衡机检测工位解算的去重量进行修正,提升了动平衡机的去重精度,提高了制动盘在高速旋转过程中的平稳性。
附图说明
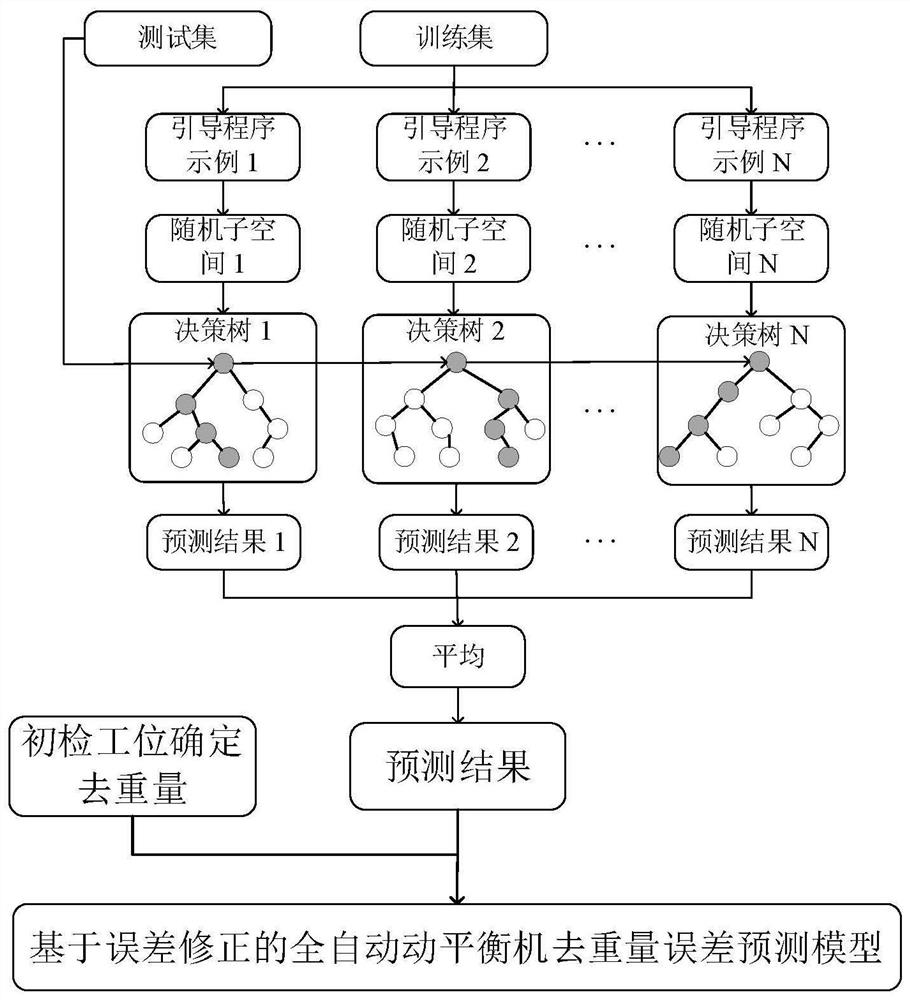
图1为本发明实施例中的基于误差修正的去重量误差预测流程图;
图2为本发明实施例中动平衡机运行特征和制动盘参数特征与去重量误差之间的相关关系图;
图3为本发明实施例总的模型去重量误差预测结果;
具体实施方式
应该注意的是,以下说明都是示例性的,目的是对本申请提供进一步的说明。除非明确说明,否则本发明所使用的所有技术和科学术语都具有与本申请所属领域技术人员理解的相同含义。
实施例一
根据本发明的实施例,公开了一种基于误差修正的动平衡机去重量误差预测方法,包括如下步骤:
(1)获取实时的动平衡机运行数据和制动盘数据;
具体的,动平衡机运行数据和制动盘数据是指所有与铣削去重相关的数据,包括但不限于:动平衡机的铣削功率、铣削深度、铣削角度、制动盘最大外圆半径、密度等数据。
(2)将上述数据输入去重量误差预测模型进行预测;
具体的,采集动平衡机检测工位确定的运行数据和制动盘数据,提取铣削深度、铣削角度和制动盘最大外圆半径等数据。
本实例提出了一种基于误差修正的动平衡机去重量误差预测模型。该方法利用随机森林建立去重量误差预测模型,然后将模型的预测结果与动平衡机检测工位确定的去重量相加最为最终的去重量。该方法提高了动平衡机去重工位的校正精度,提高了制动盘在高速旋转过程中的平稳性。
详细方法如下:
(1)数据准备
为了确定预测模型的输入量,首先使用相关系数ρ
其中,
表1展示了两个特征之间的相关系数与相关程度之间的关系,基于相关系数可以判断出两个特征之间的相关程度。
表1相关系数和相关程度的关系
图2显示了铣削宽度(Milling width)、铣削功率(Milling power)、平衡耗时(Time) 以及制动盘直径(Rotor diameter)四个特征和去重量误差(Error)之间的相互关系图,从图中可以看出铣削宽度、铣削功率、平衡耗时均有较强的相关性,所以本实例选择铣削宽度、铣削功率、平衡耗时三个特征作为模块输入。
(2)基于随机森林的去重量误差预测模型
1)模型简介
随机森林回归算法是由一组回归决策子树构成的组合模型。利用集成学习的思想,取所有决策子树的均值最为随机森林回归预测结果,其数据表达式为:
其中,T表示树的数目,x表示自变量,θ
随机森林算法引入了Bagging(套袋)和随机子空间的思想来克服决策树精度低,容易过拟合的缺点。
①Bagging思想
在原始样本中有放回的随机抽取多个样本作为训练样本,并且要求每个训练样本量等于原始样本量,对每个样本分别构建决策子树,最终取每棵决策子树预测的平均值作为最终的预测结果。
对于一个样本,在N个样本的随机采样中,每个样本没有被抽取到的概率都为:
当N趋近于无限大时得到
因此,在Bagging的每轮采样中都有大约36.8%的数据没有没采集到,没有被采集到的数据被称为袋外数据。
Bagging思想不仅能够随机化建立更多的决策子树,还同时保证了每棵子树之间相互独立。
②随机子空间思想
在构建决策子树的过程中,决策子树的每个分裂节点都从总的特征空间中随机抽取特征子空间作为决策子树分裂节点的候选特征集,并在候选特征集中选取最优特征进行分裂。
该方法保证了树和树之间的节点以及每棵树不同节点之间特征子集都不同,还能保证决策子树的多样性和随机性。提高了随机森林算法节点分裂的随机性。
随机森林的算法流程如下:
步骤1、利用Bagging思想,随机生成样本子集;
步骤2、利用随机子空间思想,随机抽取f个特征,决策子树进行分裂,构建单棵决策子树;
步骤3、重复步骤1、步骤2、,构建多棵决策子树,令每棵子树自由生长,不进行剪枝操作,形成森林;
步骤4、取多棵决策子树预测的平均值,最为最终的预测结果。
随机森林算法是以单棵决策树为基本分类预测器的集成学习模型,集合了随机子空间和集成学习理论两大随机思想,用于随机选取分裂属性值和随机选取训练样本。克服了决策树容易过拟合的缺陷,同时对于噪声和异常值不敏感,是一种有效的预测方法。
2)模型参数优化
随机森林模型主要的性能参数有三个,分别是:森林中子树的数目tress_num、树的最大深度max_depth和每棵子树随机选择的特征数目max_features。本实施例将使用10倍网格搜索对随机森林的模型参数进行寻优。
3)将模型输出的预测结果与动平衡机检测工位确定的去重量相加最为最终的去重量;
具体的,实时对动平衡机运行参数和制动盘参数进行采集,输入随机森林模型,得到去重量误差预测结果,最终将模型预测结果与动平衡机检测工位确定的去重量相加最为最终的去重量。
本实施例对去重量相对误差RE定义如下:
其中,
模型预测结果如下:
本实施例算例分析使用吉林省某制动盘平衡企业生产线机床,对即将进行平衡操作的制动盘去重误差进行预测。数据集为本条生产线机床在2020-2021年的历史平衡数据,将此数据集随机划分为训练集和测试集。
图3展示了此动平衡机床对30个制动盘的去重量误差预测结果,从图中利用本实施例所提一种基于误差修正的动平衡机去重量误差预测模型进行预测,得到的去重量误差预测结果接近真实去重量误差,本结果验证了本实施例所提预测模型具有良好的预测性能。
总的来说,本实施例所提出的预测模型可以提高动平衡机的校正精度。本实施例充分利用了集成学习将多个弱监督模型进行整合进而得到全面的强监督模型,将模型预测结果与动平衡机检测工位确定的去重量相加最为最终的去重量。算例分析说明了该预测方法的有效性,对结果进行分析可以知道,本实施例所提模型能够提高动平衡机的校正精度,提高了制动盘在高速旋转过程中的平稳性。
实施例二
根据本发明的实施例,公开了一种终端设备的实施例,其包括存储器和处理器,存储器用于存储指令,处理器用于实现各种指令,所述指令适于由处理器加载并执行实施例一种所述的基于误差修正的动平衡机去重量误差预测方法。
以上实例仅用于说明本申请的技术方案,而非对其进行限制;以上实例说明用于对理解本发明方法及其核心思想提供帮助;同时对本领域的一般技术人员在具体实施方法及应用范围上均会存在一定的修改和替换;而这些替换或者修改并不使相应的技术方案的本质脱离本发明实施例技术方案的保护范围。
- 基于机理预测与误差修正的隧道突涌水预测方法及系统
- 热误差预测模型创建方法和基于关键误差的物理-边-雾-云误差控制系统