一种基于快速传递的目标大机动条件下轨迹预测方法
文献发布时间:2023-06-19 18:34:06
技术领域
本发明属于航空航天领域,具体涉及一种基于快速传递的目标大机动条件下轨迹预测方法。
背景技术
随着航空航天技术的持续发展以及任务需求的不断增长,针对大机动条件下目标飞机的的状态参数预估变得越来越重要,其在影响战争走势过程中所发挥的重要作用不断得到验证。在利用机载雷达所获观测数据对大机动条件下的未来的目标运动状态参数进行预估的研究中,传统的方法是采用多种运动模型匹配融合方法,通过假定目标运动模型(匀速运动、S机动等),将雷达观测数据与目标运动模型进行匹配近似,再通过匹配后的运动模型对目标进行预估。然而该方法在目标大机动条件下,预估结果误差较大。与此同时,在目标状态预估过程中,空中、空间目标机动飞行在数学上可表征为多个非线性方程组,在分析某个不确定参数对非线性方程或方程组的影响的时候,常常需要求解大规模采样点处非线性方程。在现有的研究中,传统方法是采用蒙特卡洛打靶法实现,奖大规模的采样点参数带入到非线性方程中进行求解。但是该方法的计算求解效率较低,难以满足当前战争的需要。因此,如何克服这些问题,利用雷达的观测数据对大激动条件下目标的未来状态进行高精度、高效率的预估具有重要的研究意义。
发明内容
本发明目的在于提供一种基于快速传递的目标大机动条件下轨迹预测方法,以克服现有技术存在的问题,
为实现上述目的,本发明提供如下技术方案:
一种基于快速传递的目标大机动条件下轨迹预测方法,包括以下步骤:
S1:建立目标机动飞行运动学模型;
S2:建立目标机动动力学模型;
S3:构建快速传递方法的数学模型;
S4:基于机动飞行运动学模型、机动动力学模型和快速传递方法的数学模型进行目标的轨迹预测。
优选地,S1中建立目标机动飞行运动学模型的方法具体为:基于我方载机及敌方目标战机构建相应的北东地坐标系,根据我方载机及敌方目标战机的几何及角度关系,推导得到则得到目标机动飞行运动学模型。
优选地,计算目标相对于地面的位置坐标方法为
目标相对于地面的位置坐标(N
其中,N
优选地,目标相对于地面惯性坐标系下的速度如下:
其中V
优选地,S2中目标机动动力学模型由下两式表示:
式中,n
优选地,所述目标机动动力学模型为三自由度动力学模型。
优选地,S3中构建快速传递方法的数学模型具体为:
首先获取状态量参数集,确定一个中心状态量标称点,计算出中心状态量标称点与其余状态点之间的偏差值,再对中心状态标称值进行一步积分,得到下一时刻的状态量标称点,将偏差值进行转换得到下一时刻的所有偏差值,再将偏差代入至下一时刻状态量中,得到所有的下一时刻状态量参数集,完成对快速传递方法的相关建模。
优选地,将偏差值进行转换得到下一时刻的所有偏差值采用的方法为泰勒多项式展开法。
优选地,S4具体实现步骤如下:
基于连续的四个时间点,分别获取目标在四个时刻的运动状态,首先我方载机的机载雷达捕获战机在第一时间点到第二时间点的位置速度,基于目标机动飞行运动学模型计算得到目标战机于地面坐标系下的位置速度,并基于目标机动动力学模型,算出第一时间点的控制量,再基于快速传递方法获取第三时间点的目标运动状态,通过第三时间点的目标运动状态确定第二时间点的控制量,再根据第三时间点的目标运动状态和第二时间点的控制量得到第四时间点目标的状态信息,完成目标的机动预估。
优选地,第一时间点的控制量计算方法为:
其中V,θ和ψ分别为战机的飞行速度、航迹倾斜角和对应速度矢量的航向角,
与现有技术相比,本发明具有以下有益效果:本发明提供一种基于快速传递的目标大机动条件下轨迹预测方法,基于快速传递方法,通过直接对目标飞行动力学和运动学模型进行近似求解,并得出目标机动过程中的控制量近似值,然后对目标飞行状态进行预测,本发明从运动模型出发直接求解目标机动过程中的控制量近似值,进而对目标飞行状态进行预测的方法,相比于传统的方法来说,预估精度大大提高,本发明利用的快速传递方法,相比于传统的蒙特卡洛打靶法来说,对不确定参数演化定量的分析效率实现了显著的提高,本发明提出的基于快速传递的目标大机动条件下的运动状态预估方法,在保证演化精度的同时,也大大提升了求解效率,同时也适用于空中/空间目标(飞机、导弹、航天器)运动目标的控制量解算及预估。
附图说明
图1为地面坐标系及战机坐标系示意图;
图2为不确定参数快速演化算法思路图;
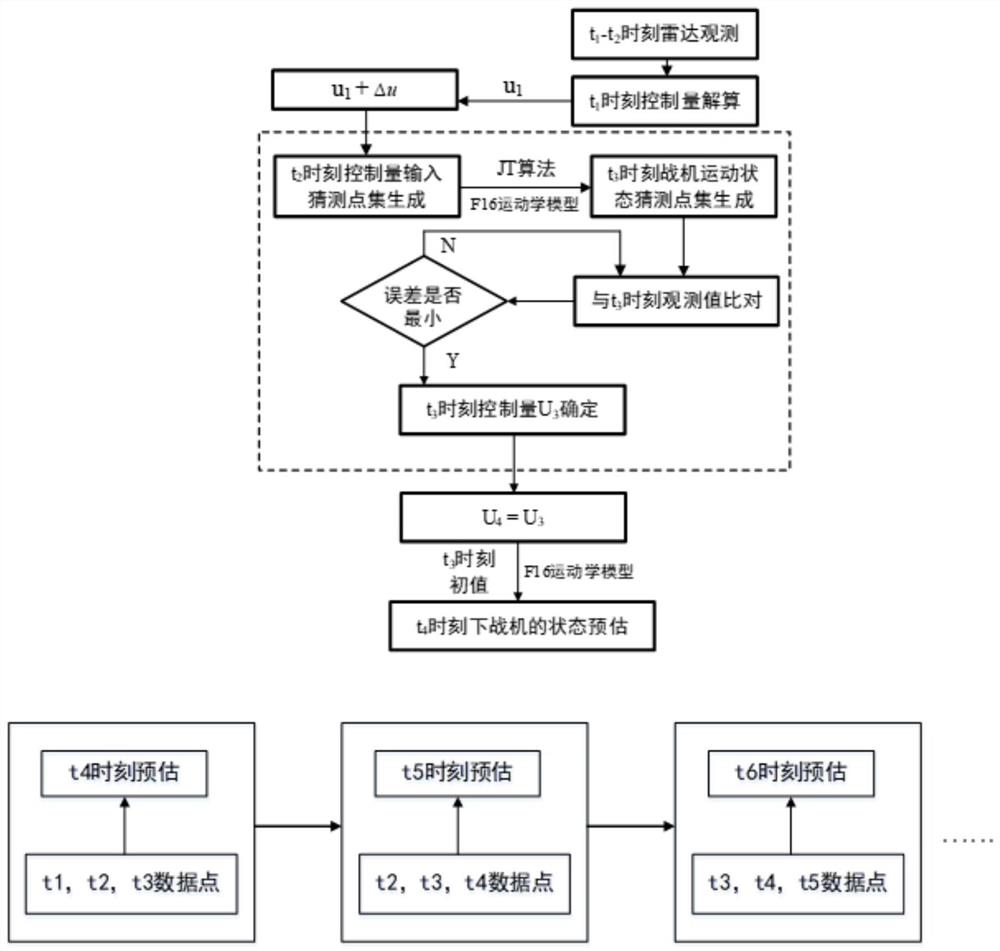
图3为机动轨迹预测流程图;
图4为机动轨迹及数据点及对应控制量示意图。
具体实施方式
下面结合具体的实施例对本发明做进一步的详细说明,所述是对本发明的解释而不是限定。
一种基于快速传递的目标大机动条件下轨迹预测方法,其特征在于,包括以下步骤:
S1:建立目标机动飞行运动学模型;
S2:建立目标机动动力学模型;
S3:构建快速传递方法的数学模型;
S4:基于机动飞行运动学模型、机动动力学模型和快速传递方法的数学模型进行目标的轨迹预测。
S1中建立目标机动飞行运动学模型的方法具体为:基于我方载机及敌方目标战机构建相应的北东地坐标系,根据我方载机及敌方目标战机的几何及角度关系,推导得到则得到目标机动飞行运动学模型。
计算目标相对于地面的位置坐标方法为
目标相对于地面的位置坐标(N
其中,N
目标相对于地面惯性坐标系下的速度如下:
其中V
S2中目标机动动力学模型由下两式表示:
式中,n
目标机动动力学模型为三自由度动力学模型。
S3中构建快速传递方法的数学模型具体为:
首先获取状态量参数集,确定一个中心状态量标称点,计算出中心状态量标称点与其余状态点之间的偏差值,再对中心状态标称值进行一步积分,得到下一时刻的状态量标称点,将偏差值进行转换得到下一时刻的所有偏差值,再将偏差代入至下一时刻状态量中,得到所有的下一时刻状态量参数集,完成对快速传递方法的相关建模,将偏差值进行转换得到下一时刻的所有偏差值采用的方法为泰勒多项式展开法。
S4具体实现步骤如下:
基于连续的四个时间点,分别获取目标在四个时刻的运动状态,首先我方载机的机载雷达捕获战机在第一时间点到第二时间点的位置速度,基于目标机动飞行运动学模型计算得到目标战机于地面坐标系下的位置速度,并基于目标机动动力学模型,算出第一时间点的控制量,再基于快速传递方法获取第三时间点的目标运动状态,通过第三时间点的目标运动状态确定第二时间点的控制量,再根据第三时间点的目标运动状态和第二时间点的控制量得到第四时间点目标的状态信息,完成目标的机动预估,第一时间点的控制量计算方法为:
其中V,θ和ψ分别为战机的飞行速度、航迹倾斜角和对应速度矢量的航向角,
实施例:
一种基于快速传递的目标大机动条件下轨迹预测方法:
步骤1:建立目标机动飞行运动学模型;
步骤2:建立目标机动动力学模型;
步骤3:构建快速传递方法的数学模型;
步骤4:基于机动飞行运动学模型、机动动力学模型和快速传递方法的数学模型进行目标机动预估。
步骤1中,附图1为飞行器地面以及战机坐标系,即北东地坐标系。
由几何关系可以得到,目标战斗机相对于地面的位置坐标(N
式中,α,β分别为地理系方位角以及地理系俯仰角。R为目标机与载机的相对距离,由雷达数据给出。
对式(1)两边进行微分,得到目标相对于地面惯性坐标系下的速度如下:
首先对雷达数据进行相关处理,获取我方战机位置,敌方战机与我方战机相对径向距离及速度,我方战机与敌方战机相对地理系方位角及地理系俯仰角。通过式(2)可以得到敌方战机相对于地面坐标系的位置速度。
步骤2中,在地面惯性坐标系下,战机的模型采用三自由度动力学/运动学模型,由下两式表示:
式中,V代表目标飞行速度。
步骤3中,附图2为不确定参数快速演化(快速传递)算法思路图。假定某个不确定参数采样标称为
式中,符号[·]表示中括号内的变量具有多项式形式。
进一步,在标称点x
式中,j=j
之后,在多项式解(6)中代入其他关联采样点状态集合
步骤4中,附图3为机动轨迹预测的流程图。附图4为机动轨迹及数据点及对应控制量示意图。依据附图4可知有四个时间节点,战机在t
首先,雷达能够捕获到t
接下来,解算下一时刻的控制量u
令u
进一步,此时雷达获取到t
由于时间间隔较短,此时认为战机的控制量变化量较小,因此在此时假设战机在t
尽管以上结合附图对本发明的实施方案进行了描述,但是本发明并不局限于上述的具体实施方案和应用领域,上述的具体实施方案仅仅是示意性的、指导性的,而不是限制性的。本领域的普通技术人员在说明书的启示下,在不脱离本发明权利要求所保护的范围的情况下,还可以做出很多种的形式,这些均属于本发明保护之列。
- 基于动态滑动窗口辨识的机动目标轨迹在线预测方法
- 基于RAV-NN的目标机动轨迹预测方法及系统