一种单弹簧串联弹性驱动器及机器人
文献发布时间:2023-06-19 13:46:35
技术领域
本发明属于软体驱动器相关技术领域,更具体地,涉及一种单弹簧串联弹性驱动器及机器人。
背景技术
串联弹性驱动器有着降低输出阻抗、缓冲减振、功率放大的作用。传统的机器人关节一般采用刚性连接来实现精确位置控制,容易造成安全隐患;足式机器人会与地面频繁发生碰撞,刚性连接结构在碰撞时会引入较大震动,导致不稳定,而且在碰撞过程中亦会造成可观的能量损耗,这也和自然界的运动模式相悖。现有研究表明不管是人和动物在走、跑、跳等运动过程中,腿部刚度是在不断变化的。因此,应用SEA作为机器人驱动器实现关节柔顺,成为近年来的研究热点。SEA通过在负载和驱动单元之间引入弹性元件,改进了传统刚性连接方式的不足,在冲击吸收、提高力输出鲁棒性、节能等方面具有显著优势。结合柔顺控制技术,SEA可以改变关节刚度,提高机器人对复杂环境的适应性。
目前,SEA已被成功应用于外骨骼、康复机器人、工业机器人等领域,取得了丰富成果。但传统的直线型弹性串联驱动器在设计过程中往往使用两根弹簧来实现其拉压功能,体积较大,使机器人整体的体积放大,重量增加,从而影响机器人的性能,因此亟需小体积的直线型SEA来减小机器人的体积,提升机器人的性能。
发明内容
针对现有技术的以上缺陷或改进需求,本发明提供了一种单弹簧串联弹性驱动器及机器人,所述弹性驱动器通过一根弹簧实现了弹性模块的拉伸和压缩,并通过合理布置使得结构紧凑,体积较小,同时保证了弹性驱动器输入端与输出端同轴,避免了额外偏转力矩的产生。
为实现上述目的,按照本发明的一个方面,提供了一种单弹簧串联弹性驱动器,所述弹性驱动器包括第一板件、第二板件、第三板件、防松螺钉、关节轴承、主轴、弹簧及第一轴,所述主轴的一端活动地设置于所述第一板件内,所述第一板件用于连接直线驱动器;所述主轴的另一端依次穿过所述第二板件、所述第三板件及所述防松螺钉后固定连接于所述关节轴承,所述关节轴承用于连接负载;所述防松螺钉固定连接于所述主轴,所述第二板件及所述第三板件滑动地连接于所述主轴;所述第一轴的一端穿过所述第一板件后连接于配合螺母,另一端固定连接于所述第三板件;其中,所述第一轴与所述第一板件之间形成活动连接;
所述弹簧的数量为一个,其套设在所述第二板件、所述主轴及所述第三板件上;所述关节轴承的中心轴、所述主轴的中心轴及所述第一板件的中心轴重合。
进一步地,所述弹性驱动器还包括位移传感器连接件及位移传感器,所述位移传感器连接件的一端设置在所述防松螺钉及所述关节轴承之间,另一端连接于所述位移传感器的一端,所述位移传感器的另一端固定连接于所述第一板件。
进一步地,所述第一板件呈阶梯状,其大端端面开设有第一凹槽,所述第一凹槽的底面开设有第二凹槽;第一挡片设置在所述第一凹槽的底面上,第一滚珠衬套嵌在所述第二凹槽的槽壁上,所述第一挡片及所述第一滚珠衬套套设在所述主轴上。
进一步地,所述第二板件为阶梯状的圆柱体,其包括垂直连接的第一段及第二段,所述第一段的直径大于所述第二段的直径;所述第二板件开设有贯穿所述第一段及所述第二段的第一贯穿孔,第二滚珠衬套嵌在所述第一贯穿孔的内壁上,部分所述主轴套设在所述第一贯穿孔内;所述第二凹槽垂直于自身长度方向的横截面为圆形,所述第一段的直径小于所述第二凹槽的直径。
进一步地,第二挡片设置在所述第二段上;所述第三板件包括垂直连接的基板及圆柱体,所述第三板件还开设有第二贯穿孔,所述第二贯穿孔贯穿所述基板及所述圆柱体,第三滚珠衬套设置在所述第二贯穿孔内,且其套设在所述主轴上。
进一步地,第三挡片设置在所述圆柱体上,且其与所述第二挡片相对设置。
进一步地,所述主轴呈阶梯状,其包括相连接的第三段及第四段,所述第三段的直径大于所述第四段的直径,且所述第三段的直径小于所述第一贯穿孔的直径。
进一步地,所述第三段收容在所述第一凹槽及所述第二凹槽内;所述第四段依次穿过所述第二板件、所述第二挡片、所述第三挡片、所述第三板件、所述防松螺钉、所述位移传感器连接件的一端后连接于所述关节轴承。
进一步地,所述弹簧套设在所述圆柱体、所述主轴及所述第二段上。
按照本发明的另一个方面,提供了一种机器人,所述机器人的驱动器为如上所述的单弹簧串联弹性驱动器。
总体而言,通过本发明所构思的以上技术方案与现有技术相比,本发明提供的单弹簧串联弹性驱动器及机器人主要具有以下有益效果:
1.所述弹簧的数量为一个,通过一根弹簧实现了弹性模块的拉伸和压缩,并通过合理布置使得结构紧凑。
2.所述关节轴承的中心轴、所述主轴的中心轴及所述第一板件的中心轴重合,如此通过主轴保证了直线驱动器端与负载端同轴,理论上避免了额外偏转力矩的产生。额外偏转力矩会使液压缸腔体内的摩擦力增大,液压杆运行不顺畅,若额外力矩太大则会引起液压杆的变形,造成液压杆的损坏,额外偏转力矩也有可能使负载端运行不顺畅。
3.应用于机器人关节处不仅会有一定的柔性,而且占用体积较小,降低了机器人关节处的体积,从而也减小了机器人关节处的质量和转动惯量,让机器人关节更加灵活,同时运行也更加节能。
附图说明
图1是本发明提供的单弹簧串联弹性驱动器的原理示意图;
图2是本发明提供的单弹簧串联弹性驱动器的结构示意图;
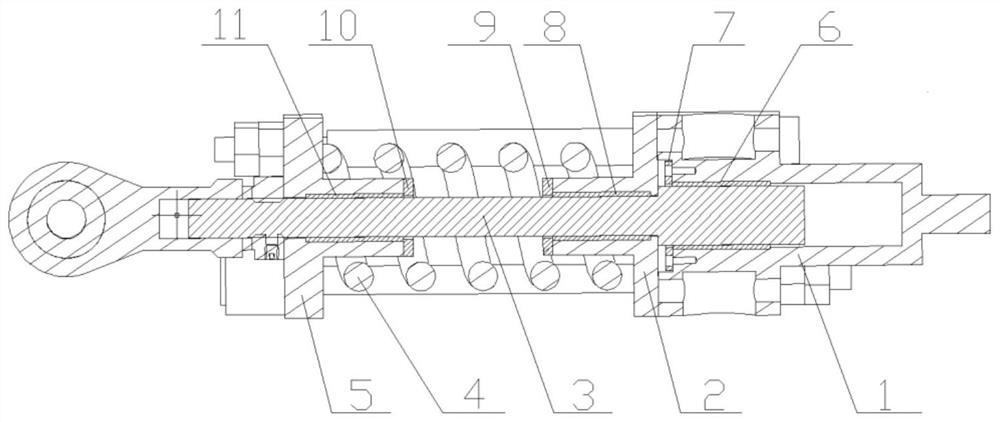
图3是图2中的单弹簧串联弹性驱动器沿A-A方向的剖视图;
图4是图2中的单弹簧串联弹性驱动器的立体示意图;
图5是图4中的单弹簧串联弹性驱动器沿另一个角度的立体示意图;
图6中的(a)、(b)及(c)分别是图2中的单弹簧串联弹性驱动器的第一板件、第二板件及第三板件的示意图;
图7是图2中的单弹簧串联弹性驱动器的第二轴的示意图。
在所有附图中,相同的附图标记用来表示相同的元件或结构,其中:1-第一板件,2-第二板件,3-主轴,4-弹簧,5-第三板件,6-第一滚珠衬套,7-第一挡片,8-第二滚珠衬套,9-第二挡片,10-第三挡片,11-第三滚珠衬套,12-顶丝,13-螺母,14-防松螺钉,15-第一轴,16-第二轴,17-关节轴承,18-位移传感器连接件,19-位移传感器,20-第一夹具,21-第二夹具。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
请参阅图1、图2、图3、图4及图5,本发明提供的单弹簧串联弹性驱动器包括第一板件1、第二板件2、主轴3、弹簧4、第三板件5、第一滚珠衬套6、第一挡片7、第二滚珠衬套8、第二挡片9、第三挡片10、第三滚珠衬套11、顶丝件12、螺母13、防松螺钉14、第一轴15、第二轴16、关节轴承17、位移传感器连接件18、位移传感器19、第一夹具20及第二夹具21。
请参阅图6,所述弹性驱动器通过所述第一板件1连接于直线驱动器。所述第一板件1呈阶梯状,其大端的端面开设有第一凹槽,所述第一凹槽的底面开设有第二凹槽。所述第一凹槽用于收容所述第一挡片7及部分所述主轴3,所述第二凹槽用于收容所述第一滚珠衬套6及部分所述主轴3。所述第一挡片7设置在所述第一凹槽的底面上,所述第一滚珠衬套6设置在所述第二凹槽的槽壁上,且其邻近所述第一挡片7设置。本实施方式中,所述大端呈矩型,其开设有四个第一安装孔,四个所述第一安装孔分别位于同一矩型的四个顶点处。
所述第二板件2为阶梯状的圆柱体,其包括垂直连接的第一段及第二段,所述第一段的直径大于所述第二段的直径。所述第二板件2开设有贯穿所述第一段及所述第二段的第一贯穿孔,所述第一贯穿孔用于收容所述第二滚珠衬套8及部分所述主轴3。所述第一段邻近所述第一板件1设置,且所述第一段的直径小于所述第二凹槽的直径,所述第二凹槽垂直于自身长度方向的横截面为圆形。所述第一滚珠衬套6及所述第二滚珠衬套8分别套设在所述主轴3上。所述第二挡片9设置在所述第二段上,且其远离所述第一板件1。
请参阅图7,所述第三板件5包括垂直连接的基板及圆柱体,所述基板上开设有四个第二安装孔。所述第三板件5通过四个所述第二安装孔分别与两个所述第一轴15及两个所述第二轴16相连接。所述第三板件5还开设有第二贯穿孔,所述第二贯穿孔贯穿所述基板及所述圆柱体,所述第三滚珠衬套11设置在所述第二贯穿孔内,且其套设在所述主轴3上。所述第三挡片10设置在所述圆柱体上,且其与所述第二挡片9相对设置。
所述第一轴15的一端穿过所述第一安装孔后连接于配合螺母,另一端穿过所述第二安装孔后连接于所述螺母13,使得所述第一轴15与所述第三挡板5固定连接。所述第二轴16的一端穿过所述第一安装孔后连接于配合螺母,另一端穿过所述第二安装孔后连接于所述顶丝件12,使得所述第二轴16固定连接于所述第三板件5。本实施方式中,所述第一轴15及所述第二轴16均与所述第一板件1滑动连接。
所述主轴3呈阶梯状,其包括相连接的第三段及第四段,所述第三段的直径大于所述第四段的直径,且所述第三段的直径小于所述第一贯穿孔的直径。所述第三段收容在所述第一凹槽及所述第二凹槽内。所述第四段依次穿过所述第二板件2、所述第二挡片9、所述第三挡片10、所述第三板件5、所述防松螺钉14、所述位移传感器连接件18的一端后连接于所述关节轴承17,所述关节轴承17用于连接负载。所述第二滚珠衬套8及所述第三滚珠衬套11分别套设在所述第四段上,所述第一挡片7及所述第一滚珠衬套6套设在所述第三段上。
所述弹簧4的数量为一个,其套设在所述圆柱体、所述主轴3及所述第二段上。所述位移传感器19的一端连接于所述位移传感器连接件18的另一端。所述第一夹具20设置在所述第一板件1上,所述第二板件21与所述第一夹具20相配合来夹紧所述位移传感器19的另一端。其中,所述第一滚珠衬套6嵌在所述第一板件1内。
所述弹性驱动器被压缩时,直线驱动器与所述第一板件1相连,其向左推动所述第一板件1,使得所述第一滚珠衬套6在所述主轴3上滑动,其中,所述第一挡片7用于防止所述第一滚珠衬套6的轴向移动,使得所述第一板件1推动所述第二板件2移动,所述第二板件2向所述弹簧4移动使得所述弹簧4被压缩,所述第二挡片9用于防止所述第二滚珠衬套8轴向移动,压缩后的所述弹簧4给所述第三板件5推力,所述第三板件5将推力传递给所述防松螺钉14,因所述防松螺钉14与所述关节轴承17均通过螺纹固定连接在所述主轴3上,从而将推力传递给所述主轴3,所述主轴3进而将推力传递给所述关节轴承17,带动所述关节轴承17处的负载运动。
其中,所述主轴3可在所述第一滚珠衬套6及所述第二滚珠衬套8上滑动,通过所述主轴3保证了输入端的所述第一板件1与输出端的所述关节轴承17的同轴度。同时,所述第一板件1、所述第二板件2可在所述第一轴15及所述第二轴16上滑动,所述第一轴15被所述螺母13固定在所述第三板件15上,所述第二轴16被所述顶丝件16固定在所述第三板件5上。所述位移传感器连接件18被所述防松螺钉14及所述关节轴承17夹住,并通过螺母与所述位移传感器19相连接。所述位移传感器19被所述第一夹具20及所述第二夹具21夹住,所述第一夹具20与所述第一板件1固定连接,从而通过所述位移传感器19测量获得所述弹性驱动器的压缩量。
所述弹性驱动器被拉伸时,直线驱动器通过螺纹与所述第一板件1相连,所述第二轴16的前端与螺母固定,直线驱动器向右拉时带动所述第一轴15及所述第二轴16向右拉所述第三板件5,使得所述弹簧4压缩,并将弹力传递给所述第二板件2,所述第二板件2将力传递给所述主轴3一个向右的力,所述关节轴承17通过螺纹固定在所述主轴3上,从而给所述关节轴承17处的负载一个向右拉的力。所述位移传感器19间接地连接于所述第一板件1,从而通过所述位移传感器19可以测量获得所述弹性驱动器的拉伸量。
本发明还提供了一种机器人,所述机器人包括如上所述的弹性驱动器及本体,所述本体连接于所述弹性驱动器。
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。