路径生成装置和路径生成方法
文献发布时间:2024-01-17 01:17:49
技术领域
本发明涉及一种生成具有自动驾驶功能、驾驶辅助功能的本车辆的目标路径的路径生成装置和路径生成方法。
背景技术
作为这种装置,以往已知有基于识别出的白线来设定本车辆的转向角的驾驶辅助装置(例如参照专利文献1)。在专利文献1记载的装置中,设定预测为在经过预先设定的预见时间后存在本车辆的前方注视点,当本车辆后方的相邻车道上存在超越车辆时,向远离该超越车辆的方向偏移前方注视点。
通过普及具有自动驾驶功能和驾驶辅助功能的车辆,能够提高交通社会整体的安全性和便利性,实现可持续的运输系统。另外,通过提高运输的效率性、顺畅性,能够削减CO
但是,在如专利文献1所记载的装置那样使目标路径向远离超越车辆的方向偏移的情况下,根据识别出超越车辆的时机,行驶路径有可能突然变化而给乘员带来不适感。
现有技术文献
专利文献
专利文献1:日本特开2014-129021号公报(JP2014-129021A)。
发明内容
本发明的一个技术方案是生成本车辆的目标路径的路径生成装置,具备:传感器,其检测本车辆的前方区域的物体;以及电子控制单元,其具有处理器和与处理器连接的存储器。处理器构成为,识别由传感器检测出的物体中的在与本车辆所行驶的行驶车道相邻的相邻车道上行驶的其他车辆,生成行驶车道上的本车辆的基准路径,从其他车辆的侧端部朝向行驶车道设定安全区域,根据基准路径生成本车辆的目标路径。生成目标路径包括:从本车辆起在其前方的规定区间内将基准路径设定为目标路径,以在规定区间的前方在本车辆与其他车辆之间确保安全区域的方式,修正基准路径,生成目标路径。
本发明的另一技术方案是生成本车辆的目标路径的路径生成方法,包括:识别由检测部检测出的本车辆的前方区域的物体中的在与本车辆所行驶的行驶车道相邻的相邻车道上行驶的其他车辆,生成行驶车道上的本车辆的基准路径,从其他车辆的侧端部朝向行驶车道设定安全区域,根据基准路径生成本车辆的目标路径。生成目标路径包括:从本车辆起在其前方的规定区间内将基准路径设定为目标路径,以在规定区间的前方在本车辆与其他车辆之间确保安全区域的方式,修正基准路径,生成目标路径。
附图说明
本发明的目的、特征以及优点,通过与附图相关的以下实施方式的说明进一步阐明。
图1是用于说明目标路径的图。
图2是用于说明目标路径的变化的图。
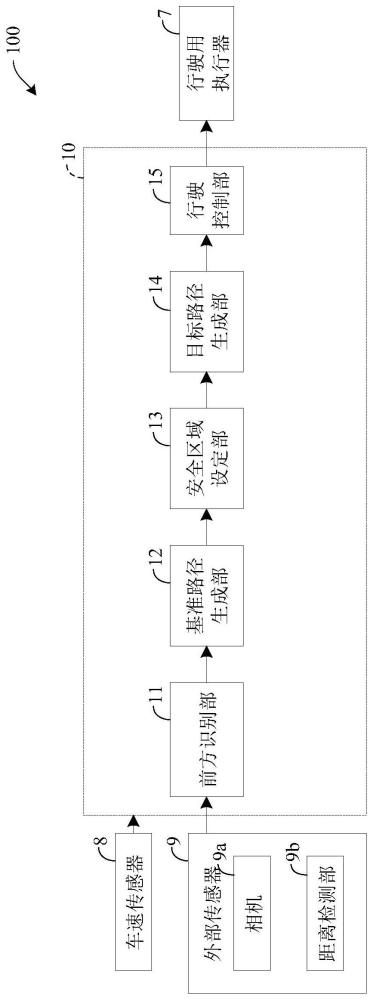
图3是概略地例示本发明的实施方式的路径生成装置的主要部分构成和处理流程的框图。
图4A是用于说明由图3的基准路径生成部和目标路径生成部生成基准路径和目标路径的图。
图4B是示出图4A的变形例的图。
图5是例示本发明的实施方式的路径生成装置的路径生成处理的流程的流程图。
具体实施方式
以下,参照图1~图5对本发明的实施方式进行说明。本发明的实施方式的路径生成装置被应用于具有驾驶辅助功能的车辆,生成本车辆的目标路径(目标行驶轨迹),该驾驶辅助功能控制行驶用执行器,使得对本车辆的驾驶员进行驾驶辅助或者使本车辆自动驾驶。本实施方式中的“驾驶辅助”包括对驾驶员的驾驶操作进行辅助的驾驶辅助和与驾驶员的驾驶操作无关地使车辆自动驾驶的自动驾驶,相当于由SAE定义的1级~4级自动驾驶,“自动驾驶”相当于5级自动驾驶。
图1和图2是用于说明目标路径的图,示出本车辆1沿着行驶车道2的中心线2C行驶的行驶场景的一例。在该情况下,基于相机等对车辆前方的行驶车道2的识别结果,生成例如沿着行驶车道2的中心线2C的基准路径3a。进而,基于对在与本车辆1所行驶的行驶车道2相邻的相邻车道5a、5b上行驶的其他车辆4a、4b的识别结果,根据需要修正基准路径3a,生成最终的目标路径3b。更具体而言,以在本车辆1与其他车辆4a、4b之间确保规定的安全区域6a、6b的方式,修正基准路径3a,生成目标路径3b。基准路径3a和目标路径3b根据最新的识别结果在每个单位时间生成并更新。
在驾驶辅助过程中或自动驾驶过程中,除了控制本车辆1的转向机构,使得沿着目标路径3b行驶之外,还控制驱动机构和制动机构,使得根据与其他车辆4a、4b之间的距离来调整车速,避免与其他车辆4a、4b碰撞。因此,即使不考虑安全区域6a、6b而生成目标路径3b,也能够确保安全。安全区域6a、6b是为了减轻在本车辆1与其他车辆4a、4b的距离较近的情况下乘员感到的不安而考虑的。
但是,如图2例示的那样,在车宽较大的大型卡车等靠近本车辆1所行驶的行驶车道2行驶的其他车辆4a超越了本车辆1的情况下,有时在刚超越后目标路径3b会突然变化,反而有可能使乘员感到不安。即,当基于刚超越后的最新的识别结果判定为在本车辆1与其他车辆4a之间没有确保安全区域6a时,通过修正基准路径3a(紧前的目标路径3b)以确保安全区域6a,由此目标路径3b突然变化。因此,在本实施方式中,如下构成路径生成装置,以便能够抑制这样的目标路径3b的突然变化。
图3是概略地示出本发明的实施方式的路径生成装置(以下称装置)100的主要部分构成和处理流程的一例的框图。如图3所示,装置100主要由电子控制单元(ECU)10构成。ECU10包括具有CPU等(处理器)、RAM(随机存取存储器)、ROM(只读存储器)等存储部(存储器)、I/O接口、其他外围电路的计算机而构成。ECU10例如构成为搭载于本车辆1并控制本车辆1的动作的多个ECU组的一部分。图3的处理例如在本车辆1起动且ECU10启动时开始,以规定周期反复实施。
搭载于本车辆1的行驶用执行器7、车速传感器8以及外部传感器9与ECU10连接。行驶用执行器7包括驱动本车辆1的发动机、电动机等驱动机构、制动本车辆1的制动器等制动机构,使本车辆1转向的转向齿轮等转向机构。车速传感器8例如由检测车轮的旋转速度的车轮速度传感器构成,检测车速V。
外部传感器9检测包括本车辆1的前方区域的物体的位置在内的外部状况。外部传感器9包括具有CCD(电荷耦合器件)、CMOS(互补金属氧化物半导体)等拍摄元件并拍摄本车辆1的前方的相机9a和检测从本车辆1到前方区域的物体的距离的距离检测部9b。距离检测部9b例如由毫米波雷达构成,该毫米波雷达照射毫米波(电波),根据照射波触碰物体而返回为止的时间,测定至该物体的距离、方向。距离检测部9b也可以由激光雷达(LiDAR)构成,该激光雷达照射激光,根据照射光触碰到物体而返回为止的时间,测定至该物体的距离、方向。
ECU10具有前方识别部11、基准路径生成部12、安全区域设定部13、目标路径生成部14、行驶控制部15作为运算部的功能性结构。即,ECU10的运算部作为前方识别部11、基准路径生成部12、安全区域设定部13、目标路径生成部14、行驶控制部15发挥功能。
前方识别部11根据来自外部传感器9的信号,识别以本车辆1的行进方向为中心的车辆前方的道路上的道路划线、路缘石、护栏等的位置,由此识别本车辆1所行驶的行驶车道2和与行驶车道2相邻的相邻车道5a、5b。另外,通过识别在相邻车道5a、5b上行驶的其他车辆4a、4b的轮廓的位置,来识别其他车辆4a、4b。
图4A是用于说明由基准路径生成部12和目标路径生成部14生成基准路径3a和目标路径3b的图。基准路径生成部12基于前方识别部11对行驶车道2的识别结果,生成行驶车道2上的本车辆1的基准路径3a。一般的道路形状使用曲率以一定比例变化的回旋曲线来设计,与道路形状对应的回旋曲线的一部分区间能够使用3次函数等高次函数来近似。
基准路径生成部12根据前方识别部11的识别结果,确定本车辆1相对于行驶车道2的行进方向,将本车辆1的当前地点作为原点O,将所确定的行进方向作为X轴,导出表示行驶车道2的中心线2C的3次函数F(X)。即,使用最小二乘法等曲线拟合方法,导出对由前方识别部11识别出的左右的道路划线(或者路缘石、护栏等)2L、2R进行近似的下式(i)、(ii)的3次函数F
F
F
接下来,根据与左右的道路划线2L、2R对应的3次函数F
F(X)= C
C
C
安全区域设定部13将从由前方识别部11识别出的其他车辆4a的侧端部朝向行驶车道2上的本车辆1的基准路径3a的规定距离W以内的区域设定为安全区域6a。更具体而言,如图4a所示,根据前方识别部11的识别结果来确定其他车辆4a的侧端部的Y坐标Y
目标路径生成部14在从本车辆1起规定距离L的本车辆1的前方所设定的识别切断区间AR内(0≤X≤L),不修正由基准路径生成部12生成的基准路径3a,而直接设定为本车辆1的目标路径3b。更具体而言,即使在本车辆1的基准路径3a与其他车辆4a之间没有确保安全区域6a的情况下(Y
根据由车速传感器8检测出的车速V,将识别切断区间AR的规定距离L设定为在规定时间t
图4B是示出识别切断区间AR的变形例的图。识别切断区间AR既可以如图4A所示,设定为遍及本车辆1的前方的左右方向的俯视下呈大致矩形状的区域,也可以如图4B所示,设定为遍及本车辆1的前方的左右方向的俯视下呈大致梯形状的区域。在该情况下,例如,设定为距离行驶车道2越远,规定距离L越短。
目标路径生成部14在识别切断区间AR的前方(X>L),如图2所示,以在本车辆1与其他车辆4a之间确保安全区域6a的方式,修正基准路径3a,生成目标路径3b。更具体而言,在判定为在越过识别切断区间AR的地点在本车辆1的基准路径3a与其他车辆4a之间确保不了安全区域6a的情况下(Y
行驶控制部15基于由目标路径生成部14生成的目标路径3b来控制行驶用执行器7,以进行对本车辆1的驾驶者的驾驶辅助或使本车辆1自动驾驶。由此,能够抑制目标路径3b的突然变化,使本车辆1沿着稳定的目标路径3b行驶。
图5是例示装置100的路径生成处理的流程的流程图,示出由装置100的运算部执行的程序的处理的流程。图5的处理例如在本车辆1起动且ECU10启动时开始,以规定周期反复实施。
首先,在S1(S:处理步骤)中,根据来自外部传感器9的信号,识别本车辆1所行驶的行驶车道2和在相邻车道5a、5b行驶的其他车辆4a、4b,根据识别结果生成基准路径3a,并且设定安全区域6a、6b。接着,在S2中,判定在S1中生成的基准路径3a与其他车辆4a、4b之间是否确保在S2中设定的安全区域6a、6b。当S2为否定(S2:否)时,处理进入S3,当为肯定(S2:是)时,处理进入S5。
在S3中,判定确保不了安全区域6a、6b的地点是否在识别切断区间AR内。当S3为否定(S3:否)时,处理进入S4,当为肯定(S3:是)时,处理进入S5。在S4中,以在S1中生成的基准路径3a与其他车辆4a、4b之间确保在S2中设定的安全区域6a、6b的方式,修正在S1中生成的基准路径3a。在S5中,不修正在S1中生成的基准路径3a而生成为目标路径3b。
采用本实施方式,能够起到如下作用效果。
(1)装置100具备:外部传感器9,其检测本车辆1的前方区域的物体;前方识别部11,其识别由外部传感器9检测出的物体中的、在与本车辆1所行驶的行驶车道2相邻的相邻车道5a、5b上行驶的其他车辆4a、4b;基准路径生成部12,其生成行驶车道2上的本车辆1的基准路径3a;安全区域设定部13,其从由前方识别部11识别出的其他车辆4a、4b的侧端部朝向行驶车道2设定安全区域6a、6b;以及目标路径生成部14,其基于由基准路径生成部12生成的基准路径3a生成本车辆1的目标路径3b(图3)。
目标路径生成部14从本车辆1起在其前方的识别切断区间AR内将基准路径3a设定为目标路径3b,以在识别切断区间AR的前方在本车辆1与由前方识别部11识别出的其他车辆4a、4b之间确保由安全区域设定部13设定的安全区域6a、6b的方式,修正基准路径3a,生成目标路径3b(图4A、图4B)。由此,即使在靠近本车辆1所行驶的行驶车道2行驶的其他车辆4a刚超过本车辆1后就被识别出的情况下,也能够抑制目标路径3b的不必要的突然变化。
(2)将识别切断区间AR设定为遍及本车辆1的前方的左右方向的、俯视下呈大致矩形形状或大致梯形状的规定区域(图4A、图4B)。通过在本车辆1的紧前方的区域遍及左右方向地设置识别切断区间AR,由此即使在本车辆1的紧前方识别出其他车辆4a、4b的情况下,也能够可靠地抑制目标路径3b的不必要的突然变化。
(3)装置100还具备行驶控制部15(图3),该行驶控制部15对行驶用执行器7进行控制,以对本车辆1的驾驶员进行驾驶辅助或者使本车辆1自动驾驶。行驶控制部15根据由目标路径生成部14生成的目标路径3b来控制行驶用执行器7。由此,能够抑制目标路径3b的突然变化,使本车辆1沿着稳定的目标路径3b行驶。
在上述实施方式中,举例说明了包括相机9a和毫米波雷达、激光雷达等距离检测部9b的外部传感器9,但检测本车辆前方区域的物体的检测部不限于此。例如,也可以根据由相机9a拍摄到的车辆前方的图像数据,检测从本车辆1到前方区域的物体的距离。在该情况下,也可以仅由相机9a构成外部传感器9。
在上述实施方式中,说明了基准路径生成部12生成沿着行驶车道2的中心线2C的基准路径3a的例子,但生成行驶车道上的本车辆的基准路径的基准路径生成部不限于此。例如,也可以生成沿着行驶车道2比中心线2C靠近道路外侧的基准路径3a。
在上述实施方式中,说明了装置100具备行驶控制部15的例子,但路径生成装置不限于这样的装置。例如,也可以具备显示控制部,该显示控制部控制平视显示器等显示部,将由目标路径生成部14生成的目标路径3b重叠显示在车辆前方的道路上。
可以任意组合上述实施方式和变形例中的一个或多个,也可以组合变形例彼此。
采用本发明,能够抑制目标路径的突然变化。
上文结合优选实施方式对本发明进行了说明,但本领域技术人员应理解,在不脱离后述权利要求书的公开范围的情况下能够进行各种修改和变更。
- 作业车自动行驶系统、行驶路径管理装置、行驶路径生成装置、行驶路径决定装置
- 一种生成测试对象最优测试覆盖路径的处理方法及装置
- 一种基于智能体的可移动装置有限空间路径生成方法
- 一种直纹面加工路径生成方法、装置及设备
- 样本存储路径生成方法、装置、计算机设备及存储介质
- 行驶路径生成系统、行驶路径生成方法、行驶路径生成程序及记录有行驶路径生成程序的记录介质、作业管理系统、作业管理方法、作业管理程序及记录有作业管理程序的记录介质、收获机、行驶模式制作系统、行驶模式制作程序、记录有行驶模式制作程序的记录介质及行驶模式制作方法
- 路径生成方法、路径生成装置以及路径生成程序