一种直驱式大行程精密转动平台
文献发布时间:2023-06-19 18:25:54
技术领域
本发明涉及精密运动定位领域,尤其涉及一种直驱式大行程精密转动平台。
背景技术
精密旋转作为精密运动定位中一种典型运动方式,在光学扫描、医用细胞操作、微制造、精密测量领域具有重要应用。一般来说,精密转动平台通过设计的特定机构,将驱动器的直线运动转换成末端所需要的旋转运动,从而实现运动输出或载体控制。
目前精密转动平台具有诸多缺陷,具体如下:
第一,对于可整周旋转的精密旋转平台,一般使用压电陶瓷驱动器,利用粘滑或尺蠖驱动原理,再间接驱动平台中动子整周旋转。由于原理上的限制,这种模式的分辨率不稳定,且动子与定子之间磨损较大,长期使用后运动精密性大大下降;
第二,对于可在固定范围内实现连续旋转运动或定位的平台,使用驱动器直接驱动动子旋转,当驱动器选择为压电陶瓷或音圈电机,平台可实现无限小的运动分辨率。但目前这类平台受限于结构设计,结构受力与变形基本在同一方向,仅依靠材料弹性小变形,行程较小,难以满足越来越普遍的大行程运动需要。
第三,对于使用柔性铰链结构作传动或变形机构的旋转平台,通常为保证旋转台安装面积,铰链结构较小,因此对铰链制造误差和对称性更为敏感,易导致旋转中心漂移。此外,该类平台往往将驱动器设置在近回转中心或铰链的位置,容易产生平面内寄生平动,对精密回转精度产生不良影响。
发明内容
为了克服现有技术的不足,本发明提供了一种直驱式大行程精密转动平台,核心结构高度中心对称,平台能够实现精密旋转运动或定位,且动子具有大安装面积,零件结构易于加工,零件数目少易于装配,有利于控制加工装配误差,从而获得长期运动的稳定性。
本发明所提供的技术方案如下:
一种直驱式大行程精密转动平台,所述转动平台包括:
基座;
柔性铰链轴承,包括柔性铰链、驱动端、定子和动子,所述定子固定于基座上,所述驱动端连接于柔性铰链轴承中心并伸出柔性铰链外;
载物架,与所述动子固定连接,用于连接所述柔性铰链轴承和末端执行元器件;
预紧弹簧,一端与弹簧支架连接进而与基座相固定,另一端与所述驱动端连接,用于预紧和提供回复力;以及
驱动器,置于所述驱动端末端,所述驱动器一端固定于驱动器支架上进而与基座相固定,另一端与所述驱动端固定或接触。
进一步的,所述末端执行元器件为光学反射镜。
进一步的,所述驱动器为直线驱动器。
进一步的,所述直线驱动器为音圈电机或压电陶瓷或气动驱动器。
进一步的,所述动子与定子通过所述柔性铰链连接,所述柔性铰链分为八组,呈中心对称,每组铰链由三个板簧型柔性铰链串联而成,极大增加轴承柔度,降低材料应力,大大提高柔性轴承运动行程。
进一步的,所述载物架底部突出,与所述动子连接,而不影响柔性铰链的变形和运动,其上转接的末端执行元器件为光学反射镜、光源或操作器。
进一步的,所述预紧弹簧由拉簧、拉簧挂钩、拉簧支架组成,拉簧挂钩通过螺纹与所述柔性铰链轴承的驱动端连接,并使用螺母进一步锁死固定,拉簧支架与基座通过螺栓固定,所述拉簧一端与一个一端带有通孔的螺杆连接,螺杆可在拉簧支架通孔内轴向移动,并通过螺母固定位置,调节螺杆前后位置可调节拉簧的初始张弛程度,即调节对驱动器的初始预紧力。
进一步的,所述驱动器前端设置有半圆形球头,所述半圆形球头与所述驱动端末端始终保持点接触,驱动器通过驱动器支架固定在基座上。
本发明所述的直驱式大行程精密转动平台中直线驱动器直接驱动柔性铰链轴承驱动端末端,由于对称性铰链结构的约束,柔性铰链轴承动子部分、载物架及其上光学反射镜产生围绕轴承轴心的旋转运动。预紧弹簧保证驱动器末端始终与柔性铰链轴承驱动端末端接触,实现稳定的精密驱动。
与现有技术相比,本发明的有益效果是:
1.本发明通过设计一种新型柔性铰链轴承,具有对称式结构和低刚度,大大提高了柔性轴承即精密转动平台的行程,降低了变形中材料应力,拓展了装置的使用寿命;
2.本发明通过直线驱动器直接驱动动子,具有稳定精确分辨率;
3.本发明所提供的精密转动平台所需驱动力更低,对驱动器推力要求更小,能够适用音圈电机、压电陶瓷、气动驱动器等多种直线驱动器;
4.本发明中的柔性铰链轴承拥有仅比定子略小的动子,即拥有大的安装面积,对于后续执行元器件的可拓展性更强;
5.本发明中驱动器外置,离核心运动部件柔性铰链轴承远,有效降低了驱动器发热和振动对于执行元器件的不良影响,同时大大减弱平面内寄生平动,保障回转中心稳定。
附图说明
图1为本发明一种直驱式大行程精密转动平台结构示意图;
图2为本发明一种直驱式大行程精密转动平台结构爆炸图;
图3为本发明一种直驱式大行程精密转动平台结构主视图;
图4为本发明一种直驱式大行程精密转动平台结构侧视图;
图5为本发明一种直驱式大行程精密转动平台结构俯视图;
图6为本发明一种直驱式大行程精密转动平台的柔性铰链示意图;
图7为本发明一种压电陶瓷直驱式大行程精密转动平台结构示意图;
图8为本发明一种压电陶瓷直驱式大行程精密转动平台结构爆炸图;
图9为本发明一种压电陶瓷直驱式大行程精密转动平台结构俯视图;
图10为本发明一种压电陶瓷直驱式大行程精密转动平台的一体式柔性铰链示意图。
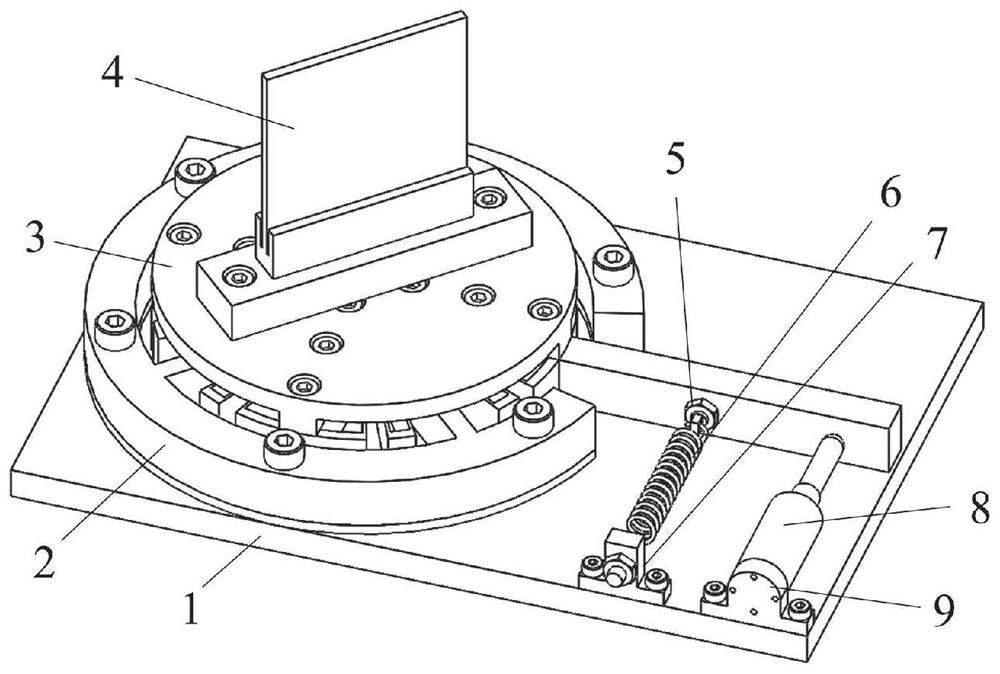
附图标记:1-基座;2-柔性铰链轴承;3-载物架;4-光学反射镜;5-拉簧挂钩;6-拉簧;7-拉簧支架;8-驱动器;9-驱动器支架;10-柔性杠杆式放大机构;11-压电陶瓷驱动器;12-压电陶瓷驱动器支架。
具体实施方式
下面结合附图对本发明具体实施方式进行说明。
由图1-图6所示,本发明具体实施例一种直驱式大行程精密转动平台包括:基座1,柔性铰链轴承2,载物架3,预紧弹簧,以及驱动器8;其中,所述柔性铰链轴承2,包括柔性铰链、驱动端、定子和动子,所述定子固定于基座1上,所述驱动端连接于柔性铰链并伸出柔性铰链外;载物架3与所述动子固定连接,用于连接所述柔性铰链轴承和光学反射镜4;所述预紧弹簧,一端与基座相固定,另一端与所述驱动端连接,用于预紧和提供回复力;所述驱动器8,置于所述驱动端末端,所述驱动器8一端固定于驱动器支架9上进而与基座1相固定,另一端与所述驱动端固定或接触。
其中,所述驱动器为音圈电机或压电陶瓷或气动驱动器等直线驱动器。
所述动子与定子通过所述柔性铰链连接,所述柔性铰链分为八组,呈中心对称,每组铰链由三个板簧型柔性铰链串联而成,极大增加轴承柔度,降低材料应力,大大提高柔性轴承运动行程。
其中,所述载物架3底部突出,与所述动子连接,而不影响柔性铰链的变形和运动,其上转接的光学反射镜还可以替换为光源或操作器等末端执行器。
其中,所述预紧弹簧由拉簧6、拉簧挂钩5、拉簧支架7组成,拉簧挂钩5通过螺纹与所述柔性铰链轴承的驱动端连接,并使用螺母进一步锁死固定,拉簧支架7与基座通过螺栓固定,所述拉簧6一端通过一个一端带有通孔的螺杆连接,螺杆可在拉簧支架通孔内轴向移动,并通过螺母固定位置,调节螺杆前后位置可调节拉簧的初始张弛程度,即调节对驱动器的初始预紧力。
本实施例中,所述驱动器8前端设置有半圆形球头,所述半圆形球头与所述驱动端末端始终保持点接触,驱动器通过驱动器支架固定在基座上。
如图7-10所示,针对使用压电陶瓷驱动器11作直线驱动器的情况,所述压电陶瓷驱动器11设置于压电陶瓷驱动器支架12上,由于压电陶瓷驱动器11分辨率高、输出行程小的特点,故特殊设计了与柔性铰链轴承一体的柔性放大机构,提高柔性轴承的输入位移和整体平台的输出范围。所述柔性放大机构为柔性杠杆式放大机构10,可与柔性铰链轴承由线切割或精密铣削等工艺一体加工而成,避免装配误差产生,同时放大机构仍集成在基座范围内,设计紧凑,位移放大效率高,实现大行程高精度的位移输出。
本发明所提出的一种直驱式大行程精密转动平台,由柔性铰链轴承2、直线驱动装置、弹簧预紧装置、基座1等组成,柔性铰链轴承外圈即定子与基座固定,内圈即动子通过高度对称的成组柔性铰链与外圈连接,并伸出驱动臂至动子之外。直线驱动装置固定直线驱动器,驱动器直接驱动驱动端末端,带动定子及其上执行元器件在柔性铰链的约束下做精密转动。弹簧预紧装置则对驱动器起到输出预紧作用,保障驱动位移和中心转动的稳定输出。此外,可适用平台的直线驱动器选型范围广泛,可选择压电陶瓷、音圈电机、气动驱动器等,其中由于压电陶瓷输出行程有限,可进一步搭配特殊设计的位移放大机构,实现平台大行程转动输出。平台具有大安装面积,核心结构高度中心对称,易于加工和装配,有利于控制加工装配误差,获得长期运动的稳定性。
本发明未详细阐述的部分属于本领域公知技术。以上所述的实施例仅是对本发明的优选实施方式进行描述,优选实施例并没有详尽叙述所有的细节,也不限制该发明仅为所述的具体实施方式。在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。