台型工具及其控制方法
文献发布时间:2024-01-17 01:21:27
技术领域
本申请涉及一种电动工具,具体涉及一种台型工具的控制方法。
背景技术
台型工具以及一些大型的电动工具是目前应用较广的工具之一,台型工具常用于切割、磨削作业。以切割为例,台型工具通常包括一个工作台和设在工作台上的锯片,用于切割材料包括木材、塑料、金属等。当用户对一些小的工件进行切割操作时,当切割完成后通常可以单手操作工作台上的开关以关闭电机。但是,在一些特定的情况下。例如需要加工的工件比较大时,当用户完成切割后没有办法及时腾出手来关机,造成电能浪费的同时也会带来一些安全隐患,用户体验感差。
发明内容
针对相关技术的不足,本申请提供一种适用于台型工具的控制方法,能够提供一种具有多种工作模式,且能够自动识别工件撤离后关机的台型工具。
为实现上述目标,本申请采用如下技术方案:
一种台型工具,包括:工作台,具有一个放置工件的工作平面;锯片,作用于工件;马达,驱动锯片旋转;控制器,用于控制马达的转动;感测装置,与控制器电连接,用于感测工件的状态并输出第一信号至控制器;第一开关,可供用户选择台型工具的至少两个工作模式;当台型工具处于第一工作模式时,控制器被配置为:基于获取的第一信号或马达的工作参数,调节马达的转速为第一转速。
在一些实施例中,台型工具还包括可供用户操作的第二开关,第二开关设置为电磁开关;第二开关包括供用户操作的启动开关和关断开关。
在一些实施例中,在台型工具处于第一工作模式或第二工作模式时,控制器被配置为:当获取到启动开关的触发信号时输出控制信号至驱动电路以驱动马达转动。
在一些实施例中,在台型工具处于第二工作模式时,控制器被配置为:当获取到关断开关的触发信号时控制马达关断。
在一些实施例中,感测装置至少包括一个传感器,传感器设置在锯片的前侧;传感器与所述锯片之间的距离的大于0且小于等于10mm。
在一些实施例中,传感器包括电容式接近开关、电感式接近开关或光电开关。
在一些实施例中,马达的工作参数包括马达的工作电流或转速。
在一些实施例中,第一转速设置为0。
在一些实施例中,台型工具还包括可拆卸地安装至台型工具的电源装置,用于为台型工具提供电能。
一种台型工具的控制方法,台型工具包括:工作台,具有一个放置工件的工作平面;锯片,作用于工件;马达,驱动锯片旋转;第一开关,可供用户选择台型工具的至少两个工作模式;感测装置,用于感测工件的状态;控制器,至少与感测装置电连接;其中,控制方法包括:获取台型工具的工作模式,当台型工具处于第一工作模式时,控制器在获取到工件的撤载信号的预设时间后,调节马达的转速为第一转速。
在一些实施例中,撤载信号与感测装置输出的第一信号或马达的工作参数有关。
在一些实施例中,马达的工作参数至少包括马达的工作电流或转速。
在一些实施例中,预设时间大于等于400ms且小于等于600ms。
本申请的有益之处在于:用户能够根据不同的切割需求,通过设置在工作台上的开关自主设置不同的工作模式以满足用户在切割大型工件和小型工件时的不同需求。在此基础之上,提供智能识别加工件撤离后自动关机功能,提升电池包续航能力的同时,降低安全隐患,提高用户体验感。
附图说明
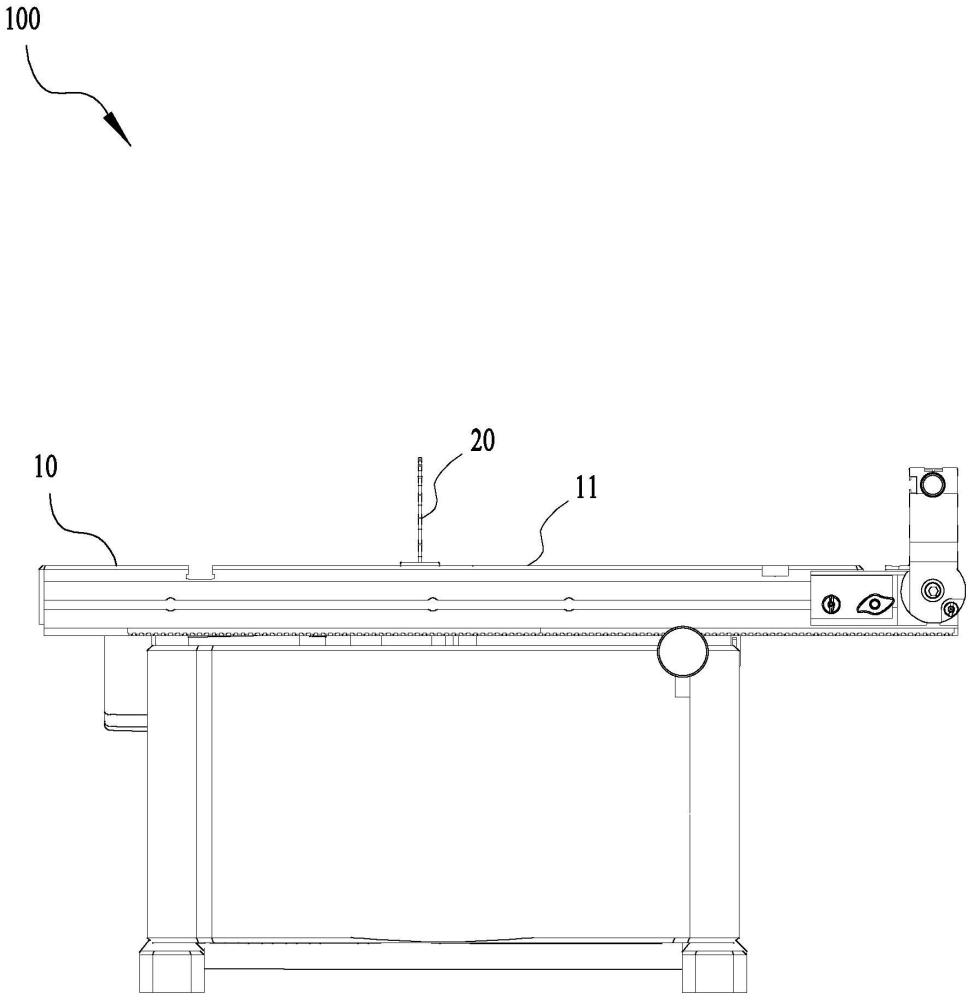
图1是作为具体实施例的台型工具的立体图;
图2是图1中的台型工具的电控原理图;
图3a是图1中的台型工具上的感测装置的一种位置示意图;
图3b是图1中的台型工具中的感测装置的另一种位置示意图;
图4是图1中的台型工具在智能模式下的控制方法的流程图;
图5是图1中的台型工具在常规模式下的控制方法的流程图;
图6是作为另一种具体实施例的台型工具的立体图;
图7是作为另一种实施例的台型工具的电控原理图;
图8图6中的台型工具上的感测装置的位置示意图;
图9是图6中的台型工具的第二开关的控制电路图;
图10是图6中的台型工具在智能模式和常规模式下的控制方案的流程图;
图11是图6中的台型工具处于空载阶段、加载阶段以及撤载阶段时工件状态的示意图;
图12是图6中的台型工具在智能模式下的控制方案的流程图。
具体实施方式
以下结合附图和具体实施例对本申请作具体的介绍。
图1示出了本申请中作为一种实施例的台型工具100。台型工具100可以是已知类型中的任何一种,如独立式台型工具或便携式台型工具。图1中的台型工具100设计为可移动的。
参见图1至图4所示,台型工具100包括工作台10,工作台10具有一个能够放置工件的工作平面11。具体的,工作平面11为工作台10的上表面,以供用户在上面进行切割操作。工作平面11上形成有通孔12。台型工具100还包括用于切割工件的锯片20。锯片20穿过通孔12并延伸。台型工具100还包括用于提供动力的马达30,锯片20由设置在工作平面11下方的马达30驱动而旋转以实现切割功能。锯片20用于切割沿工作平面11推动并与并与锯片20接触的工件40,如木材。
台型工具100还包括用于驱动马达30的驱动模块80和与驱动模块80电连接的控制器70。控制器70输出控制信号至驱动电路80以控制马达30的运行。具体地,驱动模块80在控制器70输出的控制信号的驱动下将电压以一定的逻辑关系分配给马达30,以使马达30启动并产生持续不断的转矩。在一些实施例中,驱动模块80包括多个电子开关。具体地,电子开关包括场效应晶体管或者绝缘栅双极晶体管等。在一些实施例中,驱动模块80为三相桥式电路。本实施例中的马达30优选地设置为无刷电机,当然也可以采用其他形式的电机,本申请中并不足限制。在一些实施例中,控制器70采用专用的控制芯片(例如,MCU,微控制单元,Microcontroller Unit)。
在一些实施例中,台型工具100还包括感测装置60。感测装置60与控制器70电连接,用于感测工件的状态并输出第一信号至控制器70。具体地,感测装置60至少包括一个传感器,用于识别工件40的状态。具体地,感测装置60可以采用机械开关、信号开关、电容传感器或光电开关等。本实施例中,感测装置60设置为电容式接近开关。
参见图3a所示,感测装置60至少部分位于工作平面11上用于感测工件40的加工状态以获取工件40的撤载信号。锯片20形成有切割平面(图未示),感测装置60在切割平面所在的平面上的投影与锯片20在切割平面所在平面上的投影没有重叠部分。图3a中的箭头方向为工件40的移动方向。用户沿着箭头方向移动工件40进行切割工作,当切割操作完成或用户将工件40移出工作平面11时,感测装置60能够感测到工件40的撤离。本实施例中的撤载信号与感测装置60输出的第一信号有关。本实施例中的撤载信号可以理解为工件加工结束,也可以理解为工件撤离工作平面。当然,本领域的技术人员,也可对撤载信号做其他的定义,如工件停止一段时间等。
当用户操作工件40并沿着图3a中的箭头方向逐渐移向电容式接近开关时,电容式接近开关的电容介电常数会随之发生变化,由于介电常数的变化,电容式接近开关的电容量也会产生相应的变化。控制器70与电容式接近开关之间电连接,并获取电容式接近开关的电容量的相关电信号。当用户完成切割操作后,将不会再沿着图3a中的箭头方向移动工件40。当用户将工件40撤离工作平面11后,电容式接近开关的电容介电常数会大致恢复至原先状态,感测装置60此时会输出第一信号,控制器70接收到第一信号后,调节马达30的转速为第一转速。具体而言,本实施例中的第一转速为0。当然,也可将第一转速设置为较低的转速。
参见图3b所示,感测装置60a至少部分位于工作平面11上用于感测工件40的加工状态以获取工件40的撤载信号。锯片20形成有一切割平面(图未示),感测装置60a在切割平面所在的平面上的投影位于锯片20在切割平面所在平面上的投影内。具体而言,感测装置60a在工作平面11上的投影在前后方向上位于A点与B点之间。其中,A点为锯片20在工作平面11上投影的后端点,B点为锯片20在工作平面11上的投影的中点。图3b中的箭头方向为工件40的移动方向。当用户沿着箭头方向移动工件40进行切割工作,当切割操作完成后,用户将工件40移出工作平面11时,感测装置60a能够感测到工件40的撤载信号。当然,在一些实施例中也可以通过获取马达的参数,例如电流、电压或转速用户判断工件的撤载信号。
在一些实施例中,台型工具100还包括设置在工作台10上的操作开关50,操作开关50可供用户操作。具体地,操作开关50包括第一开关51和第二开关52。其中,第一开关51为台型工具100的主控开关,第二开关52为台型工具100的马达开关。用户能通过操作第一开关51使台型工具100处于不同的工作模式。具体而言,当用户操作第一开关51处于“1”挡时,台型工具100处于第一工作模式,即智能模式。当用户操作第一开关处于“2”挡时,台型工具100处于第二工作模式,即常规模式。当用户操作第一开关51处于“0”挡时,台型工具100处于关机模式。当然,上述的工作模式数量的设定以及具体的对应关系并不是对本申请的限制。
接下来将详细介绍,台型工具100处于不同的工作模式下的控制方法。
当用户操作第一开关51使其处于“1”挡时,台型工具100处于智能模式,此时马达30不工作,当然锯片20也不旋转。当用户开启第二开关52后,马达30开始驱动锯片20旋转以供用户执行切割操作。控制器70通过感测装置60对工件40进行感测,当感测装置60感测到用户完成对工件40的切割工作后,控制器70控制马达30关闭以停止锯片20继续旋转。当台型工具100仍然处于智能模式时,用户需要再次启动马达30进行切割操作时,需再次启动第二开关51以控制马达30启动。当然,需要说明的是,当台型工具100处于智能模式时,用户也可以通过控制第一开关51,使其处于“0”挡位,实现关机。
下面将结合图4说明台型工具100在智能模式下的控制方法的流程,该方法包括如下步骤:
S11:控制器获取第一开关为“1”挡的信号,控制台型工具进入智能模式;
S12:判断第二开关是否开启,若是,则执行步骤S13;若否,则重复执行步骤S12;
S13:控制器控制马达启动,锯片旋转以供用户执行切割操作;
S14:判断第一开关是否为“0”挡,若是,则执行步骤S16;若否,则执行步骤S15;
S15:感测装置是否检测到工件撤载信号,若是,则执行步骤S16;若否,则返回步骤S14;
S16:控制器控制马达关断。
当用户通过第一开关设置台型工具处于智能模式后,用户需要继续开启第二开关,马达才能被启动从而带动锯片旋转以满足用户的切割需求。当用户切割结束后,安装在工作台上的感测装置检测到工件撤载信号后,控制器控制马达关断。当用户需要再次进行切割工作时,需要再次开启第二开关。当然,当台型工具处于智能模式时,用户也是可以通过第一开关之间关断马达,此时只需要将第一开关设置在“0”挡。
在另一些实施例中,当用户通过第一开关设置台型工具处于智能模式后,用户需要继续开启第二开关,马达才能被启动从而带动锯片旋转以满足用户的切割需求。与上述的实施例的不同之处在于,当用户切割结束后,安装在工作台上的感测装置检测到工件撤载信号后,控制器在预设时间后控制马达关断。当然,预设时间本领域的技术人员可以根据实际情况自行设计。本实施例中,预设时间设置为小于或等于1秒。当用户需要再次进行切割工作时,需要再次开启第二开关。当然,当台型工具处于智能模式时,用户也是可以通过第一开关之间关断马达,此时只需要将第一开关设置在“0”挡。
当用户操作第一开关51使其处于“2”挡时,台型工具100处于常规模式,此时马达30正常启动以驱动锯片20旋转,此时用户可以直接执行切割工作。需要说明的是,第一开关51处于“2”挡时,第二开关52处于“失效状态”。上述的“失效状态”可以理解为,控制器70对于第二开关52的开启和关断信号以及感测装置60的输出信号不做相应的处理。当用户完成切割工作后,马达30正常工作,锯片20正常旋转,此时用户可以选择继续切割操作或操作第一开关51使其处于“0”挡以关断马达30。
下面将结合图5说明台型工具100在常规模式下的控制方法的流程,该方法包括如下步骤:
S21:控制器获取第一开关为“2”挡的信号,控制台型工具进入常规模式;
S22:控制器控制马达启动,锯片旋转以供用户执行切割操作;
S23:判断第一开关是否为“0”挡,若是,则执行步骤S24;若否,则重复执行步骤S23;
S24:控制器控制马达关断。
本申请中的台型工具设置有两种工作模式,分别为常规模式和智能模式。可以理解,常规模式操作比较简单,将第一开关设置在“2”即能够启动马达,执行切割操作,当切割完成后再通过将第一开关设置在“0”挡即关断马达。该模式适用于用户切割小型加工件,在操作结束后双手能够比较容易地去操作第一开关。以及需要在短时间内进行持续切割操作。本申请中的智能模式下,用户需要再第一开关处于“1”挡时,再触发第二开关后才能启动马达执行切割操作,有益之处在于,智能模式下控制器通过感测装置检测到工件撤载信号后的预设时间后关机或者立即关机。该模式适用于用户在切割大型工件后手动进行关机不方便的工况下使用。
图6至图8示出了本申请中作为另一种实施例的台型工具100b。台型工具100b可以是已知类型中的任何一种,如独立式台型工具或便携式台型工具。图6中的台型工具100b设计为可移动的。
本实施例中,台型工具100b包括与马达30电连接的驱动模块80b、控制器70b、感测装置60b、用于获取马达电流的电流检测单元31以及用于获取马达转速的转速检测单元32。其中,电流检测单元31和转速检测单元32与控制器70b电连接。
在一些实施例中,感测装置60b安装在锯片的前侧。感测装置60b与控制器70b电连接,用于感测工件的状态并输出第一信号至控制器70b。具体地,感测装置60b与锯片之间的距离的大于0且小于等于20mm。感测装置60b至少包括一个传感器,传感器输出第一信号用于指示工件的状态。上述加工件的状态包括加工件靠近锯片或远离锯片。具体地,传感器设置为直流型、NPN型或NO型电容式接近开关。在另一些实施例中,传感器输出的第一信号用于指示工件的状态,上述的工件状态包括工件40位于传感器的上方和工件40不在传感器的上方。需要说明的是,本申请中对传感器的选型并不做限制,例如,还可以采用电感式接近开关或光电开关。
本实施例的台型工具100b还包括供用户操作的第一开关51b和第二开关52b。用户能够通过第一开关51b和第二开关52b控制台型工具100b的工作状态。具体地,参见图6所示,第一开关51b和第二开关52b设置在工作台10的侧面。这样,用户既能够较便捷地操作开关,也能够避免加工件误触开关,从而影响加工。
具体地,第一开关51b为台型工具100b的模式开关,用户能通过操作第一开关51b使台型工具100b处于不同的工作模式。当用户操作第一开关51b处于“1”挡时,台型工具100b处于第一工作模式,即智能模式。当用户操作第一开关处于“2”挡时,台型工具100b处于第二工作模式,即常规模式。
第二开关52b包括启动开关521b和关断开关522b。其中,当第一开关51b处于“1”挡时,台型工具100b为智能模式。当第一开关51b处于“2”挡时,台型工具100b为常规模式。
具体地,当第一开关51b处于“2”挡时,台型工具100b为常规模式,用户能够通过操作第二开关52b控制台型工具100b的启动和停止。其中,启动开关521b用于控制马达30的启动,关断开关522b用于控制马达30的关断。用户触发启动开关521b,控制器70b控制马达30上电进而驱动锯片转动,从而执行台型工具的切割功能。当用户结束切割操作时,触发关断开关522b,控制器70b控制马达30关断。当用户想要再次启动台型工具100b进行切割时,需要再次触发启动开关521b。
当第一开关51b处于“1”挡时,台型工具100b为智能模式,用户触发启动开关521b,控制器70b控制马达30上电进而驱动锯片转动,从而执行台型工具的切割功能。与上述的常规模式不同的是,当台型工具100b工作在智能模式时,用户无需通过手动操作触发关断开关522b控制马达30b停止驱动锯片。台型工具100b的关断不通过关断开关522b执行,而是由台型工具100b自身进行判定。上述的判定方法在下文会做具体介绍。当用户想要再次启动台型工具100b进行切割时,需要再次触发启动开关521b。
本申请中的台型工具具有多种工作模式,在智能模式下具有自动关机的功能。这样,设置多种工作模式,可以满足用户不同的工作需求。设置智能模式,可以在无需用户手动操作的前提下,节约供电装置中的电能,提高其续航时间。
接下来,将结合图9介绍第二开关52b的电路原理。在一些实施例中,第二开关52b设置为由启动开关521b、关断开关522b以及继电器523b构成的电磁开关。其中,启动开关521b设置为常开型微动开关,关断开关开522b设置为常闭型微动开关。
当用户按下启动开关521b时,由于关断开关522b为常闭型微动开关,BAT+通过启动开关521b、关断开关522b以及电源转换电路1产生12V电压,进而触发开关管Q5导通,继电器523b使能端上电触发继电器523b的主开关524b导通,从而保持AC端一直导通,电源转换电路1持续输出12V电压。上述过程可以理解为第二开关52b导通,即电磁开关导通。控制器70b获取到第二开关52b处于导通状态时,输出控制信号至驱动电路以驱动马达30转动。
当第一开关51b处于“2”挡时,台型工具100b为常规模式,用户需要触发关断开关522b,从而实现关机的功能。具体地,继续参见图8所示,当关断开关522b按下时,AC两端的电路被切断,+12V回路供电被切断,开关断Q5关断,继电器523b的使能端掉电,从而BC被关断,以使AC一直保持关断状态。上述过程可以理解为第二开关52b关断,即电磁开关关断。控制器70b获取到第二开关52b处于关断状态时,控制马达30b的停止转动。
当第一开关51b处于“1”挡时,台型工具100b为智能模式,控制器70b直接控制控制马达30b的停止转动。
本实施例中,当台型工具100b被设置为智能模式时,其具有自动关机的功能。具体地,当台型工具处于智能模式时,控制器在获取到工件的撤载信号的预设时间后,调节马达的转速为第一转速。在一些实施例中,撤载信号与感测装置输出的第一信号或马达的工作参数有关。具体地,马达的工作参数包括但不限于马达的工作电流或转速。在一些实施例中,预设时间大于等于400ms且小于等于600ms。在一些实施例中,预设时间为500ms。在一些实施例中,第一转速为0。在另一些实施例中,第一转速为大于0的较低转速。可以理解,当台型工具100b处于智能模式时,控制器被配置为:基于获取的第一信号或马达的工作参数,调节马达的转速为第一转速。
接下来,结合图10说明本实施例中的台型工具100b的不同模式的控制原理的流程图。
S31:触发启动开关;
S32:判断当前第一开关是否处于“1”挡,若否则执行步骤S33;若是则执行步骤S35;
S33:控制器控制马达启动;
S34:判断关断开关是否被触发,若是,则执行步骤S37;若否,则执行步骤S34;
S35:控制器控制马达启动;
S36:获取到工件的撤载信号,若是,则执行步骤S37;若否,则执行步骤S36;
S37:控制器控制马达关断。
接下来,将结合图11和图12介绍台型工具100b处于智能模式时的工作过程。
S41:马达启动。
第一开关51b处于“1”挡时,触发启动开关521b,马达启动,锯片开始转动,台型工具100b进入空载阶段,如图11中的(a)所示,工件40位于感测装置60b的前方。
S42:获取马达的空载电流和空载转速。
当台型工具100b处于空载阶段时,控制器70b获取马达的空载电流以及空载转速。
S43:获取感测装置输出的第一信号。
当台型工具100b处于空载阶段时,感测装置输出的第一信号用于表示是否检测到工件。例如,当感测装置输出的第一信号为0时,则表明未检测到工件。当感测装置输出的第一信号为1时,则表明检测到工件。
S44:判断是否进入加载阶段,若是,则执行步骤S45;若否,则执行步骤S42。
随着用户开始操作,台型工具100b进入如图11中的(b)和(c)所示的加载阶段。具体地,控制器70b判定台型工具100b进入加载阶段的条件:(1)通过感测装置60b输出的第一信号为1时设置台型工具100b进入加载模式。(2)控制器70b实时获取马达的工作电流和转速,当工作电流与空载电流的差值大于或等于第一电流阈值且转速与空载转速的差值大于等于500转/分钟时,设置台型工具100b进入加载模式。需要说明的是,只要满足条件(1)或者条件(2)则可以认为台型工具100b进入了加载阶段。
S45:获取台型工具在加载状态下,马达的工作电流和转速。
S46:获取感测装置输出的第一信号。
S47:判断是否进入撤载阶段,若是,则执行S48;若否,则执行步骤S45。
随着工件40加工的完成,台型工具100b进入图10中的(d)所示的撤载阶段。当控制器70b判定台型工具100b进入了撤载阶段,即获取到撤载信号后,控制马达停止驱动锯片旋转。
具体地,控制器70b判定台型工具100b进入撤载阶段的条件:(1)通过感测装置60b输出的第一信号指示未检测到工件,则判定台型工具进入撤载阶段。(2)控制器70b实时获取马达的工作电流和转速,当工作电流与空载电流的差值小于或等于第二电流阈值且转速与空载转速的差值小于或等于2000转/分钟时,设置台型工具100b进入撤载模式。需要说明的是,同时满足条件(1)和条件(2)则认为台型工具100b进入了撤载阶段。可以理解,上述的撤载信号与感测装置60b输出的第一信号或马达的工作参数有关。当台型工具进入了撤载阶段时则认为控制器接收到撤载信号。本实施例中,第一电流阈值和第二电流阈值设置为7A,
S48:控制器在预设时间后调节马达的转速为第一转速。
当控制器获取到撤载信号后,延迟预设时间控制马达转速为第一转速。本实施例中,预设时间设置为500ms,第一转速设置为0。
在一些实施例中,台型工具100b还包括电源装置(图未示),电源装置与台型工具100b电连接以为台型工具100b提供电能。电源装置可以是电池包或市电连接器。本实施例中电源装置设置为电池包,电池包可拆卸地连接至台型工具100b。本实施例中的台型工具100b还具有用于指示电源装置剩余电量的电量指示功能。具体地,台型工具100b包括可供用户操作的电量指示按键和电量指示灯。当用户按下电量指示按键后,电量指示灯会指示当前电源装置剩余的电能,并延迟一段时间后自动熄灭。本申请中,电量指示按键和电量指示灯可以设置在工作台上,也可以设置在电源装置上。当然,电量指示按键和电量指示灯可以相对靠近设置,也可以分开设置。本申请对上述的电量指示按键和电量指示灯的具体位置并不做限制。
注意,上述仅为本申请的较佳实施例及所运用技术原理。本领域技术人员会理解,本申请不限于这里所述的特定实施例,对本领域技术人员来说能够进行各种明显的变化、重新调整和替代而不会脱离本申请的保护范围。因此,虽然通过以上实施例对本申请进行了较为详细的说明,但是本申请不仅仅限于以上实施例,在不脱离本申请构思的情况下,还可以包括更多其他等效实施例,而本申请的范围由所附的权利要求范围决定。