一种用于防疫机器人的喷雾机械臂
文献发布时间:2023-06-19 19:38:38
技术领域
本发明涉及防疫机器人技术领域,具体涉及一种用于防疫机器人的喷雾机械臂。
背景技术
传染病影响人们的社会活动,医院、车站等公共场所需要定期进行消毒工作。人工消杀工作工作量大,主观性规划影响消杀质量,目前又面临用工荒和安全健康顾虑等问题,多种类防疫机器人进入消杀领域替代人类工作,其中机械臂是实现消杀作业的关键部件。带有机械臂的消杀机器人未来前景广阔。喷雾机械臂是防疫机器人对公共场所进行防疫消杀的喷雾执行机构。通过喷雾机械臂进行喷雾消杀,在空气中将消毒药液喷射成水雾,实现局部空气消毒杀灭病毒和细菌目的。
目前的防疫机器人性能大都功能比较单一。就消毒药液的喷洒功能而言,基本采用固定喷头,喷洒的范围比较小,对有些特殊狭小空间的消杀要求也无法满足。
发明内容
本发明为了解决现有防疫机器人的喷雾机械臂大多采用固定喷头,喷洒范围小,无法满足狭小空间的消杀要求的问题,进而提出一种用于防疫机器人的喷雾机械臂。
本发明为解决上述技术问题采取的技术方案是:
一种用于防疫机器人的喷雾机械臂包括电动缸、大臂、前臂和喷头旋转组件,大臂竖直设置在电动缸的上端,且电动缸推动大臂沿竖直方向移动,电动缸的上部与大臂的下部之间转动连接,前臂的后端与大臂的上部转动连接,喷头旋转组件与前臂的前端转动连接。
进一步地,所述电动缸包括电动缸输入轴、电动缸电机连接轴、电动缸电机安装座、电动缸减速电机、电动缸输出法兰和螺杆传动机构,电动缸电机安装座固接在机器人的下平板上,电动缸减速电机竖直向上固接在电动缸电机安装座上,电动缸减速电机的输出法兰与电动缸电机连接轴的下端连接,电动缸电机连接轴的上端与电动缸输入轴的下端连接,电动缸输入轴的上端通过螺杆传动机构与电动缸输出法兰连接。
进一步地,所述电动缸还包括电动缸前安装法兰、电动缸固定架和电动缸限位块,电动缸固定架固接在机器人的上平板上,电动缸前安装法兰固接在电动缸固定架的上端,电动缸输出法兰设置在电动缸前安装法兰的上部,且电动缸输出法兰与电动缸前安装法兰之间设有电动缸限位块。
进一步地,所述大臂包括大臂安装座、大臂减速电机、大臂电机安装座、大臂端盖和大臂驱动杆,大臂电机安装座固接在电动缸输出法兰的上端面上,大臂减速电机竖直向上固接在大臂电机安装座的上端,大臂减速电机的输出法兰与大臂安装座连接,大臂驱动杆的下端与大臂安装座的上端固接,大臂端盖固接在大臂驱动杆上端的外侧。
进一步地,所述大臂电机安装座的上端面固接有防尘罩固定板,防尘罩固定板的下端面与机器人的上平板之间设有防尘罩。
进一步地,所述大臂安装座的两侧相对固接有两个耳板,大臂安装座的外侧设有接近开关,接近开关设置在防尘罩固定板的上端面上。
进一步地,所述前臂包括前臂减速电机、前臂后端盖、前臂减速电机输出法兰、前臂驱动杆和前臂前端盖,前臂减速电机固接在大臂驱动杆上端的内侧,前臂减速电机的前臂减速电机输出法兰与前臂驱动杆后端的内侧固接,前臂后端盖固接在前臂驱动杆后端的外侧,前臂前端盖固接在前臂驱动杆前端的外侧。
进一步地,所述前臂驱动杆后端的内侧固接有前臂限位块。
进一步地,所述喷头旋转组件包括喷头旋转板电机、喷头座、喷头和喷头旋转板,喷头旋转板电机固接在前臂驱动杆前端的内侧,喷头旋转板电机的输出法兰与喷头旋转板的后端固接,喷头座固接在喷头旋转板的前端,喷头设置在喷头座上。
进一步地,所述喷头旋转组件还包括喷头限位块,喷头限位块固接在前臂驱动杆前端的内侧。
本发明与现有技术相比包含的有益效果是:
本发明提供了一种用于防疫机器人的喷雾机械臂,将消杀喷头安置于机器人手臂的末端。喷雾手臂机构采用的多自由度运动控制,可升降,可旋转,有效的扩展了喷雾喷头的作业范围,满足大范围消杀要求,并在低空间消杀作业或不进行消杀作业时降低喷雾手臂高度,提高机器人行走的灵活性。细长的前臂设计及末端灵活的旋转机构对一些孔洞等内部狭小的空间可进行有效的消杀作业,有效的提高了机器人对复杂环境消杀作业的适应能力。
附图说明
图1是本发明涉及的防疫机器人的整体结构示意图;
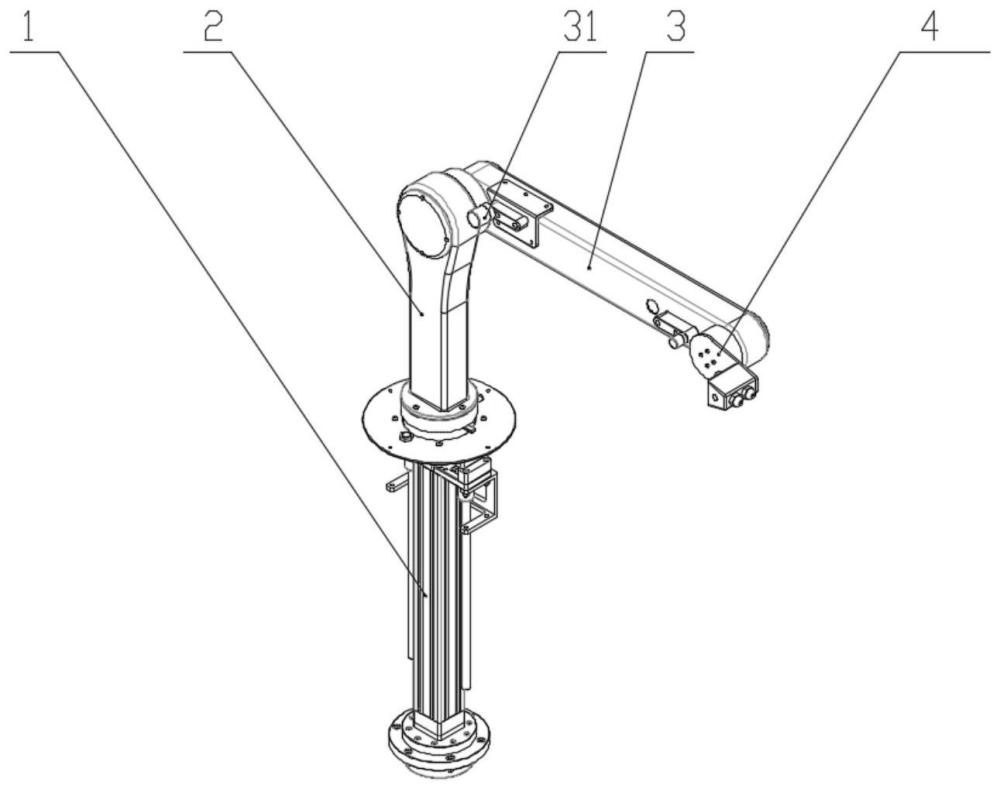
图2是本发明喷雾机械臂的整体结构示意图;
图3是本发明中电动缸1下端的结构示意图;
图4是本发明中电动缸1上端的结构示意图;
图5是本发明中大臂2与电动缸1的连接图;
图6是本发明中喷头旋转组件4与前臂3的连接图;
图7是本发明喷雾机械臂的水平旋转方向示意图;
图8是本发明喷雾机械臂的前臂3与喷头旋转组件4的旋转方向示意图;
图9是本发明喷雾机械臂应用于狭小空间消杀的示意图。
具体实施方式
具体实施方式一:结合图1至图9说明本实施方式,本实施方式所述一种用于防疫机器人的喷雾机械臂包括电动缸1、大臂2、前臂3和喷头旋转组件4,大臂2竖直设置在电动缸1的上端,且电动缸1推动大臂2沿竖直方向移动,电动缸1的上部与大臂2的下部之间转动连接,前臂3的后端与大臂2的上部转动连接,喷头旋转组件4与前臂3的前端转动连接。
具体实施方式二:结合图1至图9说明本实施方式,本实施方式所述电动缸1包括电动缸输入轴11、电动缸电机连接轴12、电动缸电机安装座13、电动缸减速电机14、电动缸输出法兰17和螺杆传动机构,电动缸电机安装座13固接在机器人的下平板上,电动缸减速电机14竖直向上固接在电动缸电机安装座13上,电动缸减速电机14的输出法兰与电动缸电机连接轴12的下端连接,电动缸电机连接轴12的上端与电动缸输入轴11的下端连接,电动缸输入轴11的上端通过螺杆传动机构与电动缸输出法兰17连接。本实施方式中未公开的技术特征与具体实施方式一相同。
电动缸1内部为螺杆传动机构。通过电动缸减速电机14驱动电动缸电机连接轴12旋转,电动缸电机连接轴12带动电动缸输入轴11旋转,通过螺杆传动机构带动电动缸输出法兰17实现前进、后退的直线运动。本防疫机器人选用的电动缸垂直布置,行程300mm,可以使机构完成上升或下降300mm距离的直线运动。本机构电动缸减速电机14选用的是伺服减速电机。这个电机的特点是:将电机、减速机及伺服驱动器集成为一体。这种电机法兰输出,体积小,易安装,节省了普通伺服电机伺服驱动器所占用的空间。这对于小型机器人来说,节省内部空间意义重大。电动缸1尾端安装在电动缸电机安装座13上,电动缸减速电机14也安装在电动缸电机安装座13上,电动缸电机连接轴12安装于电动缸减速电机14输出法兰上,电动缸电机连接轴12与电动缸输入轴11通过键连接。这样,当电动缸减速电机14输出法兰转动时,就会带动电动缸输入轴11的转动,从而实现电动缸输出法兰17的直线运动。
螺杆传动机构包括缸体、螺杆和螺母套筒,螺杆竖直设置在缸体内,螺杆的下端与电动缸输入轴11连接,螺母套筒套装在螺杆的外侧,且与螺杆螺纹连接,螺母套筒的外侧与缸体的内侧壁沿直线方向滑动连接,螺母套筒的上端穿过缸体的上端面且延伸到缸体的外侧,电动缸输出法兰17固接在螺母套筒的上端面上。
具体实施方式三:结合图1至图9说明本实施方式,本实施方式所述电动缸1还包括电动缸前安装法兰110、电动缸固定架15和电动缸限位块16,电动缸固定架15固接在机器人的上平板上,电动缸前安装法兰110固接在电动缸固定架15的上端,电动缸输出法兰17设置在电动缸前安装法兰110的上部,且电动缸输出法兰17与电动缸前安装法兰110之间设有电动缸限位块16。本实施方式中未公开的技术特征与具体实施方式二相同。
电动缸前安装法兰110固接在缸体的上端面,电动缸前安装法兰110与机器人上平板通过电动缸固定架15连接,使电动缸1更加稳定,抵挡机器人运动中产生的惯量冲击。电动缸输出法兰17与电动缸前安装法兰110之间用电动缸限位块16隔开,电动缸限位块16为尼龙限位块,用于限制电动缸输出法兰17的回缩位置。
具体实施方式四:结合图1至图9说明本实施方式,本实施方式所述大臂2包括大臂安装座21、大臂减速电机22、大臂电机安装座23、大臂端盖24和大臂驱动杆26,大臂电机安装座23固接在电动缸输出法兰17的上端面上,大臂减速电机22竖直向上固接在大臂电机安装座23的上端,大臂减速电机22的输出法兰与大臂安装座21连接,大臂驱动杆26的下端与大臂安装座21的上端固接,大臂端盖24固接在大臂驱动杆26上端的外侧。本实施方式中未公开的技术特征与具体实施方式三相同。
大臂减速电机22安装在大臂电机安装座23上。大臂减速电机22所选电机与电动缸驱动电机14同款。大臂电机安装座23安装于电动缸输出法兰17上。大臂安装座21安装于大臂减速电机22输出法兰上。大臂驱动杆26与大臂安装座21通过螺钉固定。大臂减速电机22可以驱使大臂360°水平旋转,满足防疫机器人对圆周方向的消杀作业。
具体实施方式五:结合图1至图9说明本实施方式,本实施方式所述大臂电机安装座23的上端面固接有防尘罩固定板18,防尘罩固定板18的下端面与机器人的上平板之间设有防尘罩19。本实施方式中未公开的技术特征与具体实施方式四相同。
具体实施方式六:结合图1至图9说明本实施方式,本实施方式所述大臂安装座21的两侧相对固接有两个耳板,大臂安装座21的外侧设有接近开关25,接近开关25设置在防尘罩固定板18的上端面上。本实施方式中未公开的技术特征与具体实施方式五相同。
大臂安装座21上有两个耳板,呈180°分布。大臂安装座21旋转时,当耳板在接近开关25上方时,接近开关25就能传出信号。为防止大臂2旋转过度,致使导线缠绕,损伤导线,机器人通过接近开关25进行信号限位,使得大臂±90°旋转,可满足机器人对于前方与左右空间的消杀作业。而对于后面的空间进行消杀作业时,只需机器人本体转向来实现即可。
具体实施方式七:结合图1至图9说明本实施方式,本实施方式所述前臂3包括前臂减速电机32、前臂后端盖33、前臂减速电机输出法兰34、前臂驱动杆35和前臂前端盖36,前臂减速电机32固接在大臂驱动杆26上端的内侧,前臂减速电机32的前臂减速电机输出法兰34与前臂驱动杆35后端的内侧固接,前臂后端盖33固接在前臂驱动杆35后端的外侧,前臂前端盖36固接在前臂驱动杆35前端的外侧。本实施方式中未公开的技术特征与具体实施方式四相同。
前臂驱动杆35与大臂驱动杆26通过前臂减速电机32连接。前臂减速电机32所选电机与电动缸驱动电机14同款。前臂减速电机32固定于大臂2顶端,而前臂驱动杆35后端固定在前臂减速电机32的前臂减速电机输出法兰34上。前臂减速电机32可驱使前臂驱动杆35上下旋转。
具体实施方式八:结合图1至图9说明本实施方式,本实施方式所述前臂驱动杆35后端的内侧固接有前臂限位块31。本实施方式中未公开的技术特征与具体实施方式七相同。
前臂驱动杆35后端设前臂限位块31,阻挡前臂驱动杆35向下旋转位置,以免喷头与机器人本体产生碰撞。
具体实施方式九:结合图1至图9说明本实施方式,本实施方式所述喷头旋转组件4包括喷头旋转板电机41、喷头座42、喷头43和喷头旋转板44,喷头旋转板电机41固接在前臂驱动杆35前端的内侧,喷头旋转板电机41的输出法兰与喷头旋转板44的后端固接,喷头座42固接在喷头旋转板44的前端,喷头43设置在喷头座42上。本实施方式中未公开的技术特征与具体实施方式七相同。
喷头旋转板44与前臂驱动杆35通过喷头旋转板电机41连接。喷头旋转板电机41固定于前臂驱动杆35前端,而喷头旋转板44固定在喷头旋转板电机41输出法兰上。喷头旋转板电机41驱使喷头旋转板44在前端小范围的上下旋转。喷头旋转板44前端安装喷头座42,喷头座42上安装喷雾喷头43,完成喷雾消杀作业。
具体实施方式十:结合图1至图9说明本实施方式,本实施方式所述喷头旋转组件4还包括喷头限位块45,喷头限位块45固接在前臂驱动杆35前端的内侧。本实施方式中未公开的技术特征与具体实施方式九相同。
喷头旋转板44前端设喷头限位块45,使喷头旋转板44旋转不超过±180°,以防止管路缠绕。
大臂2旋转中心与喷头旋转组件4旋转中心之间距离500mm。喷头消杀作业范围可以覆盖前方及左右500mm半径的区域。前臂3外形细长,喷头旋转组件4前端尖细,有利于进入狭小空间进行消杀作业。大臂驱动杆26与前臂驱动杆35采用中空设计,既可以减轻重量,也方便管线穿梭布置。
虽然在本文中参照了特定的实施方式来描述本发明,但是应该理解的是,这些实施例仅仅是本发明的原理和应用的示例。因此应该理解的是,可以对示例性的实施例进行许多修改,并且可以设计出其他的布置,只要不偏离所附权利要求所限定的本发明的精神和范围。应该理解的是,可以通过不同于原始权利要求所描述的方式来结合不同的从属权利要求和本文中所述的特征。还可以理解的是,结合单独实施例所描述的特征可以使用在其他所述实施例中。
- 一种适用于服务机器人的六自由度机械臂及服务机器人
- 一种精准防疫喷雾消毒杀菌机器人
- 一种带有喷雾和紫外消毒智能防疫机器人