一种无人船辅助靠离泊及充电方法、装置及系统
文献发布时间:2023-06-19 09:33:52
技术领域
本发明涉及无人船充电控制技术领域,尤其涉及一种无人船辅助靠离泊及充电方法、装置及系统。
背景技术
近年来,无人驾驶汽车和无人机逐渐为大众所熟悉,同样,在智能航海领域,有关无人船的研究探索也在进行之中。无人船主要分为远程操控无人船和完全自主操控无人船两大类,可借助精准卫星定位和自身传感设施,按照预设任务在水面安全可靠的航行,水面无人船的英文缩写为USV。
随着新能源理念的普及与推广,新型无人船多设计为以电力为推进动力的船舶,那么,持续稳定的续航是保证其正常航行的前提条件。目前,无人船在电量不足时,往往需要人工进行充电续航,这种充电方式很大程度上约束了无人船的智能化和自动化的发展和应用。
发明内容
有鉴于此,有必要提供一种无人船辅助靠离泊及充电方法、装置及系统,用以解决无人船靠离泊操纵复杂、充电需要人工操作的问题。
本发明提供一种无人船辅助靠离泊及充电方法,包括以下步骤:
获取无人船的电量信息,获取电量不足的无人船的船舶位置信息;
根据所述船舶位置信息,按由近及远的顺序对临近水域中各供电轨道进行筛选,筛选出距离所述无人船最近且供电状态正常的供电轨道,作为匹配供电轨道;
判断所述匹配供电轨道是否包含空余泊位,如果是,则将所述匹配供电轨道的空余泊位位置信息发送至无人船;如果否,则重新筛选匹配供电轨道作为下一匹配供电轨道,并结合无人船的剩余电量、所述匹配供电轨道的航行等待时间、无人船至所述下一匹配供电轨道的航行距离选择相应的泊位位置信息发送至无人船。
本发明还提供一种无人船辅助靠离泊及充电装置,包括处理器以及存储器,所述存储器上存储有计算机程序,所述计算机程序被所述处理器执行时,实现所述无人船辅助靠离泊及充电方法。
本发明还提供一种无人船辅助靠离泊及充电系统,包括岸基供电终端以及无人船;所述岸基供电终端包括所述无人船辅助靠离泊及充电装置;
所述无人船判断自身是否电量不足,并用于发送电量不足信息至所述岸基供电终端;
所述无人船还用于获取自身的船舶位置信息,并发送至所述岸基供电终端;
所述岸基供电终端用于将所述匹配供电轨道的空余泊位位置信息发送至所述无人船,以便辅助所述无人船进行无人靠泊控制。
进一步的,所述岸基供电终端还包括岸端通信电路、泊位检测装置、供电轨道检测电路以及供电轨道;
所述供电轨道安装于岸边,并与岸边的供电系统电连接;
所述供电轨道检测电路与所述供电轨道电连接,并用于检测所述供电轨道的供电状态;
所述泊位检测装置用于检测供电轨道是否存在空余泊位;
所述泊位检测装置、供电轨道检测电路分别与所述无人船辅助靠离泊及充电装置电连接,并用于将所述供电状态以及空余泊位信息发送至所述无人船辅助靠离泊及充电装置;
所述无人船辅助靠离泊及充电装置与所述岸端通信电路电连接,并通过所述岸端通信电路将所述空余泊位位置信息发送至无人船。
进一步的,所述供电轨道为分段式结构。
进一步的,所述无人船包括船体、船端处理器、船端通信电路、定位电路、蓄电池状态检测电路以及传感器模块;
所述蓄电池状态检测电路与所述船体的蓄电池电连接,并用于检测蓄电池的蓄电池状态信息;
所述定位电路用于获取所述船体的船舶位置信息;
所述定位电路、蓄电池状态检测电路分别与所述船端处理器电连接,并用于将所述蓄电池状态信息以及船舶位置信息发送至所述船端处理器;
所述船端处理器用于根据所述蓄电池状态信息判断蓄电池是否电量不足;
所述船端处理器通过所述船端通信电路与所述岸基供电终端通信连接,并通过所述通信电路将电量不足信息以及船舶位置信息发送至所述岸基供电终端;
所述船端处理器还用于通过所述通信电路接收所述岸基供电终端发送的空余泊位位置信息;
所述船端处理器与所述传感器模块电连接,并用于根据传感器模块实时获取船舶的航向信息,结合测距仪获取的船岸距离数据,进一步确定船舶的姿态信息。
进一步的,所述无人船还包括测距仪以及伸缩式集电杆;
所述测距仪与所述船端处理器电连接,并用于检测船体与岸基之间的岸船距离,还用于检测船体与空余泊位之间的实时靠泊距离;
所述船端处理器用于判断所述船岸距离是否小于所述伸缩式集电杆的最大长度,如果小于,则控制所述伸缩式集电杆旋转、伸缩以便与所述供电轨道连接,并在所述伸缩式集电杆与所述供电轨道连接后,控制所述伸缩式集电杆伸缩以拉动无人船完成靠泊作业,如果不小于,则继续进行无人驾驶控制船舶靠近岸边,直到测距仪测到的所述船岸距离小于所述伸缩式集电杆的最大长度;
所述船端处理器还用于在充电结束后控制所述伸缩式集电杆伸长,以便辅助无人船离泊;并判断所述船岸距离是否大于设定距离,如果大于,则控制所述伸缩式集电杆与所述供电轨道脱离。
进一步的,所述伸缩式集电杆包括液压缸、伸缩臂、机械抓手以及转向电机;
所述液压缸与所述伸缩臂连接,所述伸缩臂与所述底座转动连接,所述转向电机与所述伸缩臂连接,并驱动所述伸缩臂绕所述底座转动,所述机械抓手安装于所述伸缩臂的伸缩端,所述机械抓手的控制阀、所述液压缸以及所述转向电机分别与所述船端处理器电连接。
进一步的,所述船体的两侧均安装有所述伸缩式集电杆,每一侧的所述伸缩式集电杆的数量均为两个,所述船端处理器通过靠泊侧各伸缩式集电杆的伸缩长度判断所述无人船是否完成靠泊作业。
进一步的,所述船端处理器用于根据所述蓄电池状态信息判断蓄电池是否电量不足,具体为:
根据所述蓄电池状态信息计算蓄电池的剩余电量,根据所述剩余电量判断所述蓄电池是否电量不足。
有益效果:本发明首先获取无人船的电量不足信息,然后获取电量不足的无人船的船舶位置信息,从而便于为电量不足的无人船寻找合适的充电泊位。根据船舶位置信息,筛选出距离无人船最近且供电状态正常的供电轨道,作为匹配供电轨道,然后判断匹配供电轨道是否还有空余泊位,有的话直接将空余泊位位置信息发送给无人船,没有就重新寻找匹配供电轨道以及相应的空余泊位信息,直至找到合适的空余泊位,并将其位置信息发送给无人船,无人船即可根据泊位位置信息进行自动靠泊,进而实现充电作业。本发明可以实现无人船的自动靠泊充电作业。
附图说明
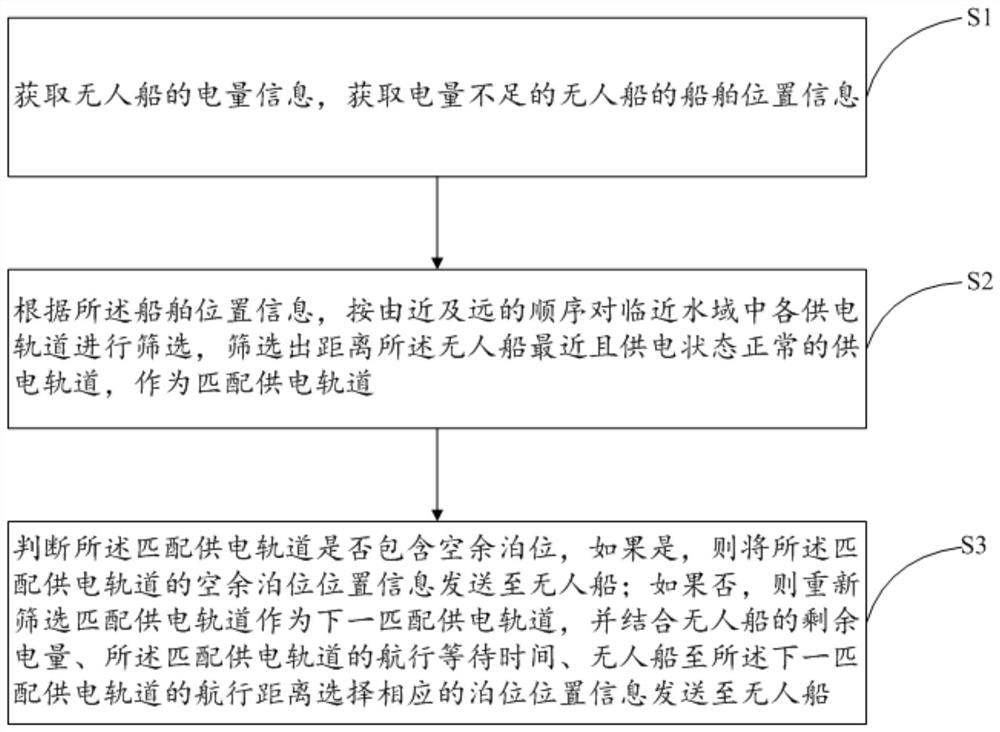
图1为本发明提供的无人船辅助靠离泊及充电方法第一实施例的方法流程图;
图2为本发明提供的无人船辅助靠离泊及充电系统第一实施例的无人船靠泊流程图;
图3为本发明提供的无人船辅助靠离泊及充电系统第一实施例的无人船靠泊示意图;
图4为本发明提供的无人船辅助靠离泊及充电系统第一实施例的测距仪布设位置示意图;
图5为本发明提供的无人船辅助靠离泊及充电系统第一实施例的伸缩式集电杆结构示意图。
具体实施方式
下面结合附图来具体描述本发明的优选实施例,其中,附图构成本申请一部分,并与本发明的实施例一起用于阐释本发明的原理,并非用于限定本发明的范围。
实施例1
如图1所示,本发明的实施例1提供了无人船辅助靠离泊及充电方法,包括以下步骤:
S1、获取无人船的电量信息,获取电量不足的无人船的船舶位置信息;
S2、根据所述船舶位置信息,按由近及远的顺序对临近水域中各供电轨道进行筛选,筛选出距离所述无人船最近且供电状态正常的供电轨道,作为匹配供电轨道;
S3、判断所述匹配供电轨道是否包含空余泊位,如果是,则将所述匹配供电轨道的空余泊位位置信息发送至无人船;如果否,则重新筛选匹配供电轨道作为下一匹配供电轨道,并结合无人船的剩余电量、所述匹配供电轨道的航行等待时间、无人船至所述下一匹配供电轨道的航行距离选择相应的泊位位置信息发送至无人船。
本实施例首先获取无人船的电量不足信息,然后获取电量不足的无人船的船舶位置信息,从而便于为电量不足的无人船寻找合适的充电泊位。根据船舶位置信息,按由近及远的顺序对临近水域中各供电轨道进行筛选,筛选出距离无人船最近且供电状态正常的供电轨道,作为匹配供电轨道,然后判断匹配供电轨道是否还有空余泊位,有的话直接将空余泊位位置信息发送给无人船,没有就重新寻找匹配供电轨道以及相应的空余泊位信息,直至找到合适的泊位,并将其位置信息发送给无人船,无人船即可根据泊位位置信息进行自动靠泊,进而实现充电作业。当匹配供电轨道没有空余泊位时,结合无人船的剩余电量、所述匹配供电轨道的航行等待时间、无人船至所述下一匹配供电轨道的航行距离选择相应的泊位位置信息发送至无人船,具体为:根据无人船的剩余电量判断无人船是否能航行至所述下一匹配供电轨道,如果不能航行至下一匹配供电轨道,则发送所述匹配供电轨道最快充电结束泊位的位置信息至无人船,如果能航行至下一匹配供电轨道,则进一步判断所述匹配供电轨道的充电等待时间是否大于所述下一匹配供电轨道的航行所需时间,如果大于,则发送所述下一匹配供电轨道的空余泊位位置信息至无人船,如果不大于,则发送所述匹配供电轨道最快充电结束泊位的位置信息至无人船。
具体的,当前匹配供电轨道没有空余泊位时,则对所述匹配供电轨道所处泊位最快结束充电时间t
实施例2
本发明的实施例2提供了无人船辅助靠离泊及充电装置,包括处理器以及存储器,所述存储器上存储有计算机程序,所述计算机程序被所述处理器执行时,实现实施例1提供的无人船辅助靠离泊及充电方法。
本发明实施例提供的无人船辅助靠离泊及充电装置,用于实现无人船辅助靠离泊及充电方法,因此,无人船辅助靠离泊及充电方法所具备的技术效果,无人船辅助靠离泊及充电装置同样具备,在此不再赘述。
实施例3
本发明的实施例3提供了无人船辅助靠离泊及充电系统,包括岸基供电终端以及无人船;所述岸基供电终端包括如权利要求2所述的无人船辅助靠离泊及充电装置;
所述无人船判断自身是否电量不足,并用于发送电量不足信息至所述岸基供电终端;
所述无人船还用于获取自身的船舶位置信息,并发送至所述岸基供电终端;
所述岸基供电终端用于将所述匹配供电轨道的空余泊位位置信息发送至所述无人船,以便辅助所述无人船进行无人靠泊控制。
岸基供电终端利用无人船辅助靠离泊及充电装置对所获取的信息进行处理,根据无人船所在地理位置信息,对其临近水域供电轨道、泊位进行检测,筛选出距离无人船靠泊最近且有泊位空余的供电轨道,利用无线通信手段为无人船发送最近的空余泊位位置信息,以便无人船向空余泊位进行靠泊并充电。
优选的,所述岸基供电终端还包括岸端通信电路、泊位检测装置、供电轨道检测电路以及供电轨道;
所述供电轨道安装于岸边,并与岸边的供电系统电连接;
所述供电轨道检测电路与所述供电轨道电连接,并用于检测所述供电轨道的供电状态;
所述泊位检测装置用于检测供电轨道是否存在空余泊位;
所述泊位检测装置、供电轨道检测电路分别与所述无人船辅助靠离泊及充电装置电连接,并用于将所述供电状态以及空余泊位信息发送至所述无人船辅助靠离泊及充电装置;
所述无人船辅助靠离泊及充电装置与所述岸端通信电路电连接,并通过所述岸端通信电路将所述空余泊位位置信息发送至无人船。
优选的,所述供电轨道为分段式结构。
岸基端供电轨道设计成分段式,每一段对应一个泊位,并在每一段轨道中都设计一段凹槽,凹槽用于与无人船连接,由岸基供电系统控制供电轨道的电路开断及电势。
优选的,所述无人船包括船体、船端处理器、船端通信电路、定位电路、蓄电池状态检测电路以及传感器模块;
所述蓄电池状态检测电路与所述船体的蓄电池电连接,并用于检测蓄电池的蓄电池状态信息;
所述定位电路用于获取所述船体的船舶位置信息;
所述定位电路、蓄电池状态检测电路分别与所述船端处理器电连接,并用于将所述蓄电池状态信息以及船舶位置信息发送至所述船端处理器;
所述船端处理器用于根据所述蓄电池状态信息判断蓄电池是否电量不足;
所述船端处理器通过所述船端通信电路与所述岸基供电终端通信连接,并通过所述通信电路将电量不足信息以及船舶位置信息发送至所述岸基供电终端;
所述船端处理器还用于通过所述通信电路接收所述岸基供电终端发送的空余泊位位置信息;
所述船端处理器与所述传感器模块电连接,并用于根据传感器模块实时获取船舶的航向信息,结合测距仪获取的船岸距离数据,进一步确定船舶的姿态信息。
无人船检测自身的电量信息,并在电量不足时向岸基供电终端发送电量不足信息,便于岸基供电终端帮助其寻找最近的空闲泊位,进而实现无人靠泊及充电。
优选的,所述无人船还包括测距仪以及伸缩式集电杆;
所述测距仪与所述船端处理器电连接,并用于检测船体与岸基之间的岸船距离,还用于检测船体与空余泊位之间的实时靠泊距离;
所述船端处理器用于判断所述船岸距离是否小于所述伸缩式集电杆的最大长度,如果小于,则控制所述伸缩式集电杆旋转、伸缩以便与所述供电轨道连接,并在所述伸缩式集电杆与所述供电轨道连接后,控制所述伸缩式集电杆伸缩以拉动无人船完成靠泊作业,如果不小于,则继续进行无人驾驶控制船舶靠近岸边,直到测距仪测到的所述船岸距离小于所述伸缩式集电杆的最大长度;
所述船端处理器还用于在充电结束后控制所述伸缩式集电杆伸长,以便辅助无人船离泊;并判断所述船岸距离是否大于设定距离,如果大于,则控制所述伸缩式集电杆与所述供电轨道脱离。
具体的,图3示出了无人船自动靠泊的过程:图3中左侧图为无人船准备靠泊的情况,此时,船岸距离不小于伸缩式集电杆的最大长度,即使伸缩时集电杆伸长至最大长度仍然无法接触到供电轨道实现充电,因此无人船需进一步靠近泊位航行;图3中中间图示出了无人船正在进行辅助靠离泊的情况,此时,船岸距离小于伸缩式集电杆的最大长度,因此船端控制器控制伸缩式集电杆旋转、伸缩,以便伸缩式集电杆与供电轨道连接,连接完成后,将伸缩式集电杆固定在供电轨道上并控制伸缩式集电杆缩短,从而将无人船拉向岸基,实现无人船的进一步辅助靠离泊到位;图3中右侧图为无人船已经靠泊到位的情况,无人船靠泊到位后,利用伸缩式集电杆完成岸-船电力的传输,实现无人船的充电。无人船充电过程中船端处理器不断监测蓄电池状态信息,并判断是否充电完成,当无人船充电完成后,船端处理器通知岸基供电终端切断供电轨道的供电电路。此外,岸基工作人员可通过对无人船充电状态的实时监测,对无人船航程及时做出规划。
优选的,还可以在伸缩式集电杆上安装受力传感器,用于采集伸缩式集电杆的受力信息,船端处理器根据受力信息对集电杆的伸缩长度和偏转角度进行进一步的微调,使集电杆受电头与供电轨道之间的拉力在一定范围内,避免供电轨道。如果受力信息接近供电轨道所能承受的最大拉力,即停止辅助靠泊作业,采用舵靠泊,以防止对供电轨道产生伤害。
优选的,如图5所示,所述伸缩式集电杆包括液压缸1、伸缩臂2、机械抓手3、底座4以及转向电机;
所述液压缸1与所述伸缩臂2连接,所述伸缩臂2与所述底座4转动连接,所述转向电机3与所述伸缩臂2连接,并驱动所述伸缩臂2绕所述底座4转动,所述机械抓手3安装于所述伸缩臂2的伸缩端,所述机械抓手3的控制阀、所述液压缸1以及所述转向电机分别与所述船端处理器电连接。
无人船通过伸缩式集电杆与供电轨道进行连接,船端处理器通过控制转向电机的旋转角度控制集电杆的角度,通过控制液压缸的伸缩长度来控制集电杆的长度,船端处理器通过控制机械抓手的抓取和松开,来控制集电杆与供电轨道的连接和分离。应该理解的,本实施例仅给出一种伸缩式集电杆的实施方式,伸缩式集电杆还可以采用其他结构,只要能够实现伸缩、转向以及与供电轨道的固定连接即可。
优选的,所述船体的两侧均安装有所述伸缩式集电杆,每一侧的所述伸缩式集电杆的数量均为两个,所述船端处理器通过靠泊侧各伸缩式集电杆的伸缩长度判断所述无人船是否完成靠泊作业。
在船体两侧均设置伸缩式集电杆,以满足无人船不同方位的靠泊需求。具体的,两侧的伸缩式集电杆固定于无人船两舷,并沿船艏方向布置,可减少对无人船甲板的占用率。当无人船靠泊时,船舶一侧船舷逐渐靠近码头岸边,集电杆由转向电机控制旋转至码头岸边一侧,并伸长搭靠于供电轨道凹槽中,当无人船靠稳后进行无人船的充电作业。
充电完成后,无人船准备离泊,两根集电杆可同时伸长一定距离辅助无人船平行岸边离泊,离开泊位一定距离后集电杆脱离供电轨道,由液压缸回收至船舷,该方法可确保在前后有船的情况下依然可以顺利安全离泊。具体的,如图4所示,本实施例中在船体两侧分别设置两个伸缩式集电杆,测距仪为红外测距仪,按照图4所示的测距仪布设方式将7个测距仪设置在无人船的外沿一圈,D
具体的,如图2所示,无人船到达指定泊位后开始进行自动靠泊充电;
S41、首先,通过红外测距仪进行测距,测得船岸距离;
S42、判断所述船岸距离是否小于所述伸缩式集电杆的最大长度;
S431、如果不小于,则继续通过推进器使无人船靠近泊位航行;
S432、如果小于,则控制所述伸缩式集电杆旋转、伸缩以便与所述供电轨道连接;
S44、伸缩式集电杆与供电轨道连接以后,集电杆缓慢收缩,以便将船体拉动至指定泊位靠泊;
S45、红外测距仪测距,测得船岸距离;
S46、船端处理器根据公式(1)判断无人船是否完成指定泊位靠泊;
S47、如果完成,则伸缩杆停止收缩,无人船靠泊结束,可以进行无人自动充电。
如图2所示,船端处理器靠泊侧各伸缩式集电杆的伸缩长度,结合公式(1)判断无人船是否完成指定泊位靠泊,以判断所述无人船是否完成靠泊作业,具体为:
由无人船的位置信息,及艏艉的红外测距仪计算出无人船靠泊过程中的船速V(船速分为纵向速度V
即船岸距离大于固定值D
优选的,所述船端处理器用于根据所述蓄电池状态信息判断蓄电池是否电量不足,具体为:
根据所述蓄电池状态信息计算蓄电池的剩余电量,根据所述剩余电量判断所述蓄电池是否电量不足。
蓄电池状态包括蓄电池电压、电流,根据其计算蓄电池的荷电状态。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
- 一种无人船辅助靠离泊及充电方法、装置及系统
- 一种辅助无人船回收机器人的装置、系统和方法