手制动拉杆系统及车辆
文献发布时间:2023-06-19 09:43:16
技术领域
本发明涉及制动系统技术领域,特别涉及一种手制动拉杆系统及车辆。
背景技术
铁路客车车辆为了在停车时防止车辆遛车,均设置有手制动装置。其中,手制动装置中需要链条进行制动力的传递,当实施手制动后链条拉紧,力传递后实施制动;当进行手制动缓解时,由于链条整体非钢性,致使缓解时链条无法复位,继续反向缠绕在手制动机上,造成再次制动而缓解失效,在车辆正常拖动时,使轮对闸片或制动盘紧贴车轮或制动盘,从而发生安全事故,造成车轮或制动盘擦伤等重大安全隐患。
因此,如何有效避免手制动缓解失效,是本领域技术人员目前需要解决的技术问题。
发明内容
有鉴于此,本发明的目的是提供一种手制动拉杆系统,能够有效避免手制动缓解失效。本发明的另一目的是提供一种包括上述手制动拉杆系统的车辆,能够有效避免手制动缓解失效。
为实现上述目的,本发明提供如下技术方案:
一种手制动拉杆系统,包括拐臂和连接于所述拐臂的手制动链条,所述拐臂转动连接于定位轴上,所述拐臂与所述定位轴之间连接有弹性件,所述弹性件的复位力使所述拐臂带动所述手制动链条沿着预设缓解方向移动。
优选地,所述拐臂的一端固定有拐臂套筒,所述拐臂套筒的中间通孔套接于所述定位轴外侧,所述弹性件设于所述拐臂套筒内。
优选地,所述弹性件为套设于所述定位轴上的扭簧,所述扭簧的两端分别固定于所述定位轴和所述拐臂套筒。
优选地,所述定位轴包括第一轴段和与所述第一轴段固定连接构成阶梯轴的第二轴段,所述第一轴段与所述第二轴段之间形成的第一台阶面面向所述第一轴段所在的一侧,所述第一台阶面上设有轴定位孔,所述扭簧套接于所述第一轴段上且所述扭簧的第一自由端插接于所述轴定位孔中。
优选地,所述定位轴还包括与所述第二轴段构成阶梯轴的第三轴段,所述第一轴段和所述第三轴段分别设于所述第二轴段轴向上的两侧,所述第二轴段与所述第三轴段之间形成面向所述第一轴段所在的一侧的第二台阶面;所述拐臂套筒由所述第一轴段的自由端朝向所述定位轴上套接,直至所述拐臂套筒抵于所述第二台阶面上。
优选地,所述第一轴段上螺纹固定有锁紧螺母,以使所述拐臂套筒夹设于所述锁紧螺母和所述第三轴段之间。
优选地,所述拐臂套筒在轴向上的一端内壁设有轴向贯通的端板,所述端板上沿轴向贯穿设有套筒定位孔,所述端板套设于所述定位轴外,且所述扭簧的第二自由端插接于所述套筒定位孔中。
优选地,所述端板内部可拆卸连接有第一轴套,以通过所述第一轴套转动连接于所述定位轴。
优选地,自由状态下,所述扭簧的两端相隔180°。
一种车辆,包括如上所述的手制动拉杆系统。
本发明提供的手制动拉杆系统,包括拐臂和连接于拐臂的手制动链条,拐臂转动连接于定位轴上,拐臂与定位轴之间连接有弹性件,弹性件的复位力使拐臂带动手制动链条沿着预设缓解方向移动。
在手制动过程中,手制动链条沿着预设制动方向运动,并拉动拐臂绕定位轴转动,且弹性件弹性形变储存弹性势能;在手制动缓解的过程中,松开对手制动链条的约束后,弹性件为手制动链条提供复位的动力,弹性件拉动手制动链条沿着预设缓解方向运动,当弹性件回复到不形变的原状后,手制动链条即制动缓解到位,可以提高手制动链条在制动缓解过程中的自动化复位,能够有效避免手制动缓解失效。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
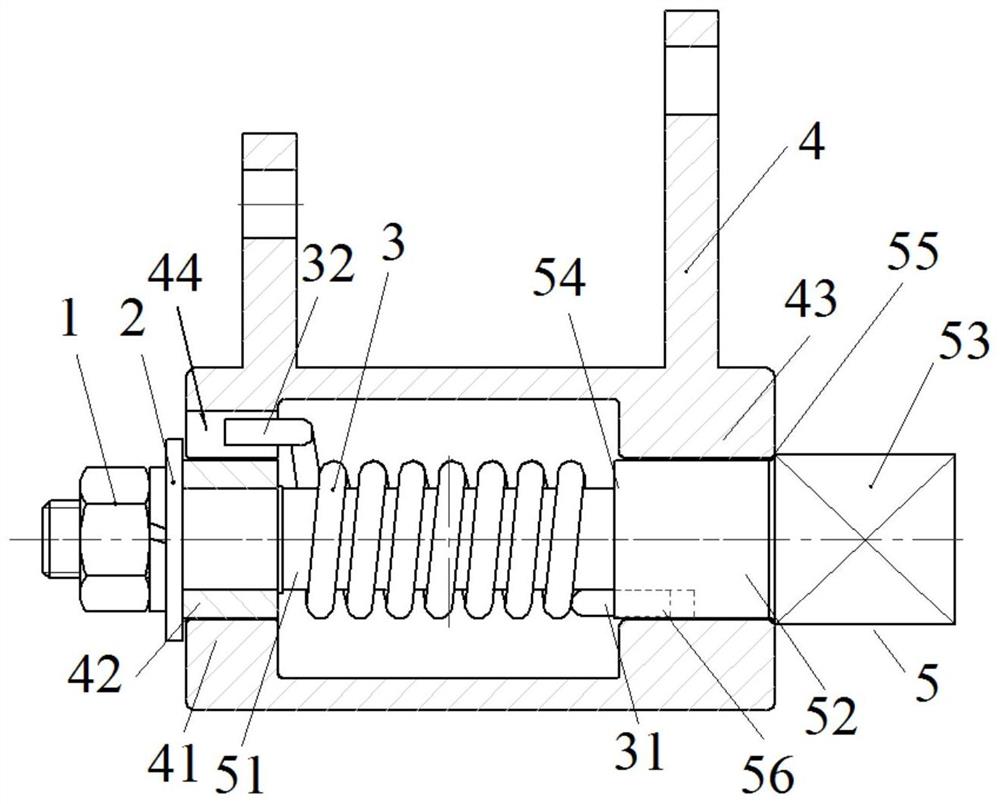
图1为本发明所提供手制动拉杆系统中拐臂套筒的剖视图;
图2为本发明所提供手制动拉杆系统的结构示意图。
附图标记:
锁紧螺母1;
垫圈2;
扭簧3,第一自由端31,第二自由端32;
拐臂套筒4,端板41,第一轴套42,第二轴套43,套筒定位孔44;
定位轴5,第一轴段51,第二轴段52,第三轴段53,第一台阶面54,第二台阶面55,轴定位孔56;
制动缸6,制动杆61,平衡杠杆62;
手制动链条7,手制动链轮71;
端墙8;
拐臂9,第一拉杆91,第二拉杆92。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明的核心是提供一种手制动拉杆系统,能够有效避免手制动缓解失效。本发明的另一核心是提供一种包括上述手制动拉杆系统的车辆,能够有效避免手制动缓解失效。
本发明所提供的手制动拉杆系统,具体应用于铁路客车。请参考图1和图2,该手制动拉杆系统包括拐臂9和连接于拐臂9的手制动链条7,拐臂9转动连接于定位轴5上,定位轴5连接在车体上。拐臂9与定位轴5之间连接有弹性件,弹性件的复位力使拐臂9带动手制动链条7沿着预设缓解运动方向移动。
在手制动过程中,手制动链条7沿着预设制动方向运动,并拉动拐臂9绕定位轴5转动,且弹性件弹性形变储存弹性势能。在手制动缓解的过程中,松开对手制动链条7的约束后,弹性件为手制动链条7提供辅助复原力,弹性件拉动手制动链条7沿着预设缓解方向运动,以将手制动链条7拉直,当弹性件回复到不形变的原状后,手制动链条7即制动缓解到位,可以提高手制动链条7在制动缓解过程中的自动化复位,能够有效避免手制动缓解失效。
进一步地,拐臂9的一端固定有拐臂套筒4,拐臂套筒4的中间通孔套接于定位轴5外侧,以绕着定位轴5转动。弹性件设置在拐臂套筒4内。通过在拐臂9上增设拐臂套筒4以容纳弹性件,无需改变拐臂9的其他结构,可以直接在现有拐臂9的基础上进行简单的改进,不影响拐臂在现有客车上的正常安装。另外,拐臂9的另一端通过第一拉杆91连接手制动链条7,拐臂9的中部通过第二拉杆92连接制动缸6。
进一步地,弹性件为套设于定位轴5上的扭簧3,扭簧3的两端分别固定于定位轴5和拐臂套筒4,便于装配。当然,在其他实施例中,弹性件还可以为弹片。
进一步地,如图1所示,定位轴5包括第一轴段51和与第一轴段51固定连接构成阶梯轴的第二轴段52。第一轴段51与第二轴段52之间形成的第一台阶面54面向第一轴段51所在的一侧。第一台阶面54上设有轴定位孔56,扭簧3套接于第一轴段51上,且扭簧3的第一自由端31插接于轴定位孔56中。通过在定位轴5的第一台阶面54上设置轴定位孔56,在第一轴段51上沿着轴向套接扭簧3的过程中,可以直接将扭簧3的第一自由端31插接在轴定位孔56中,进一步便于扭簧3的装配。
进一步地,定位轴5还包括与第二轴段52构成阶梯轴的第三轴段53,第一轴段51和第三轴段53分别设于第二轴段52轴向上的两侧,第二轴段52与第三轴段53之间形成面向第一轴段51所在的一侧的第二台阶面55。装配过程中,拐臂套筒4由第一轴段51的自由端朝向定位轴5上套接,直至拐臂套筒4抵于第二台阶面55上。通过第二台阶面55的限位作用,可以为拐臂套筒4在定位轴5上的安装起到定位作用,为拐臂套筒4的装配提供便利。
进一步地,第一轴段51上螺纹固定有锁紧螺母1,以使拐臂套筒4夹设于锁紧螺母1和第三轴段53之间,实现对拐臂套筒4的轴向定位。通过锁紧螺母1的设置,可以实现拐臂套筒4在定位轴5上的可拆卸连接。另外,锁定螺母与拐臂套筒4之间可以设置垫圈2。
进一步地,拐臂套筒4在轴向上的一端内壁设有轴向贯通的端板41,端板41上沿轴向贯穿设有套筒定位孔44,端板41套设在定位轴5外,且扭簧3的第二自由端32插接于套筒定位孔44中。在装配过程中,先将扭簧3安装于定位轴5上后,再套接拐臂套筒4,由于套筒定位孔44是一个沿轴向贯通的通孔,便于观察扭簧3的位置,以便将扭簧3的第二自由端32准确插入套筒定位孔44中。
进一步地,端板41内部可拆卸连接有第一轴套42,以通过第一轴套42转动连接于定位轴5。具体地,第一轴套42采用螺母压装在定位轴5上。通过第一轴套42与拐臂套筒4的可拆卸连接,能够为拐臂套筒4在定位轴5上的安装提供便利。具体地,第一轴套42转动套接在第一轴段51上。另外,拐臂套筒4在轴向上的远离端板41的一端一体设置第二轴套43,以转动连接于定位轴5,具体可以转动连接于第二轴段52。第一轴套42与第二轴套43同轴心设置。
进一步地,自由状态下,扭簧3的两端相隔180°,从而可以确保扭簧3能够提供的最大弹力,增加扭簧3能够提供扭力的范围。
除了上述手制动拉杆系统,本发明还提供了一种车辆,具体可以为轨道客车,该车辆包括手制动拉杆系统,具体可以为以上任一实施例中提供的手制动拉杆系统,有益效果可以相应参考以上各个实施例。该车辆的其他各部分的结构请参考现有技术,本文不再赘述。
需要说明的是,当元件被称为“固定”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。
以上对本发明所提供的手制动拉杆系统及车辆进行了详细介绍。本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以对本发明进行若干改进和修饰,这些改进和修饰也落入本发明权利要求的保护范围内。
- 手制动拉杆系统及车辆
- 车辆手制动用拉线、拉杆自动调整器