调整方法、检测设备及计算机可读存储介质
文献发布时间:2023-06-19 11:39:06
技术领域
本申请涉及半导体技术领域,更具体而言,涉及一种扫描装置的调整方法、检测设备及非易失性计算机可读存储介质。
背景技术
在半导体检测领域,对工件进行检测时,需将工件放置在机台上,再利用扫描装置对工件表面采用直线扫描成像的方法获取工件图像,接着根据工件图像来检测工件表面的信息,例如是否存在缺陷,若存在缺陷,缺陷的类型如何。然而,由于扫描装置安装时相对扫描方向存在旋转误差,旋转误差容易导致扫描得到的工件图像畸变失真。为了避免工件图像产生畸变失真,则需要调试扫描装置,目前的调试技术,需要保存工件图像,通过目测的方式来获取扫描装置的调整角度,调整效率低下。
发明内容
本申请实施方式提供一种扫描装置的调整方法、检测设备及非易失性计算机可读存储介质。
本申请实施方式的扫描装置的调整方法包括:获取步骤:对工件扫描成像以获取所述工件的第一图像;处理步骤:对所述第一图像进行处理,以获取所述第一图像中第一方向轮廓与所述扫描装置的扫描方向之间的第一角度、及所述第一图像中第二方向轮廓与所述扫描装置的扫描方向之间的第二角度,所述第一方向轮廓与所述第二方向轮廓相交;计算步骤:根据所述第一角度及所述第二角度获取扫描装置的旋转角;及调整步骤:在旋转角位于预设范围外时,根据所述旋转角调整所述扫描装置的扫描视场的长度方向与所述扫描方向之间的角度。
本申请实施方式的检测设备包括扫描装置及一个或多个处理器。所述扫描装置用于执行获取步骤:对工件扫描成像以获取所述工件的第一图像。一个或多个所述处理器用于执行:处理步骤:对所述第一图像进行处理,以获取所述第一图像中第一方向轮廓与所述扫描装置的扫描方向之间的第一角度、及所述第一图像中第二方向轮廓与所述扫描装置的扫描方向之间的第二角度,所述第一方向轮廓与所述第二方向轮廓相交;计算步骤:根据所述第一角度及所述第二角度获取扫描装置的旋转角;及调整步骤:在旋转角位于预设范围外时,根据所述旋转角调整所述扫描装置的扫描视场的长度方向与所述扫描方向之间的角度。
本申请实施方式的非易失性计算机可读存储介质存储有计算机程序,当所述计算机程序被一个或多个所述处理器执行时,使得处理器能够实现如下方法:控制扫描装置执行获取步骤:对工件扫描成像以获取所述工件的第一图像;执行处理步骤:对所述第一图像进行处理,以获取所述第一图像中第一方向轮廓与所述扫描装置的扫描方向之间的第一角度、及所述第一图像中第二方向轮廓与所述扫描装置的扫描方向之间的第二角度,所述第一方向轮廓与所述第二方向轮廓相交;执行计算步骤:根据所述第一角度及所述第二角度获取扫描装置的旋转角;及执行调整步骤:在旋转角位于预设范围外时,根据所述旋转角调整所述扫描装置的扫描视场的长度方向与所述扫描方向之间的角度。
本申请的扫描装置的调整方法、检测设备及非易失性计算机可读存储介质中,通过计算第一图像中第一方向轮廓与扫描装置的扫描方向之间的第一角度、及第二方向轮廓与扫描装置的扫描方向之间的第二角度,以获取扫描装置的旋转角,并根据旋转角调整扫描装置的扫描视场的长度方向与扫描方向之间的角度,相较于目测方式调整扫描装置,提高了扫描装置的调整效率。
本申请的实施方式的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本申请的实施方式的实践了解到。
附图说明
本申请的上述和/或附加的方面和优点从结合下面附图对实施方式的描述中将变得明显和容易理解,其中:
图1是本申请某些实施方式的扫描装置的调整方法的流程图;
图2是本申请某些实施方式的检测设备的结构示意图;
图3是本申请某些实施方式的扫描装置的扫描视场的长度方向与扫描方向倾斜的俯视图;
图4是图3中的扫描装置获取的第一图像的示意图;
图5是本申请某些实施方式的扫描装置的扫描视场的长度方向与扫描方向垂直的俯视图;
图6是图5中的扫描装置获取的第一图像的示意图;
图7是本申请某些实施方式的扫描装置的调整方法的流程图;
图8是本申请某些实施方式的扫描装置的调整方法中的第三图像的示意图;
图9是图8中的P1a处的放大示意图;
图10是本申请某些实施方式的扫描装置的调整方法中的第四图像的示意图;
图11至图13是本申请某些实施方式的扫描装置的调整方法的流程图;
图14是本申请某些实施方式的非易失性计算机可读存储介质与处理器连接的结构示意图。
具体实施方式
以下结合附图对本申请的实施方式作进一步说明。附图中相同或类似的标号自始至终表示相同或类似的元件或具有相同或类似功能的元件。
另外,下面结合附图描述的本申请的实施方式是示例性的,仅用于解释本申请的实施方式,而不能理解为对本申请的限制。
在本申请中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
请参阅图1至图4,本申请实施方式的扫描装置10的调整方法包括:
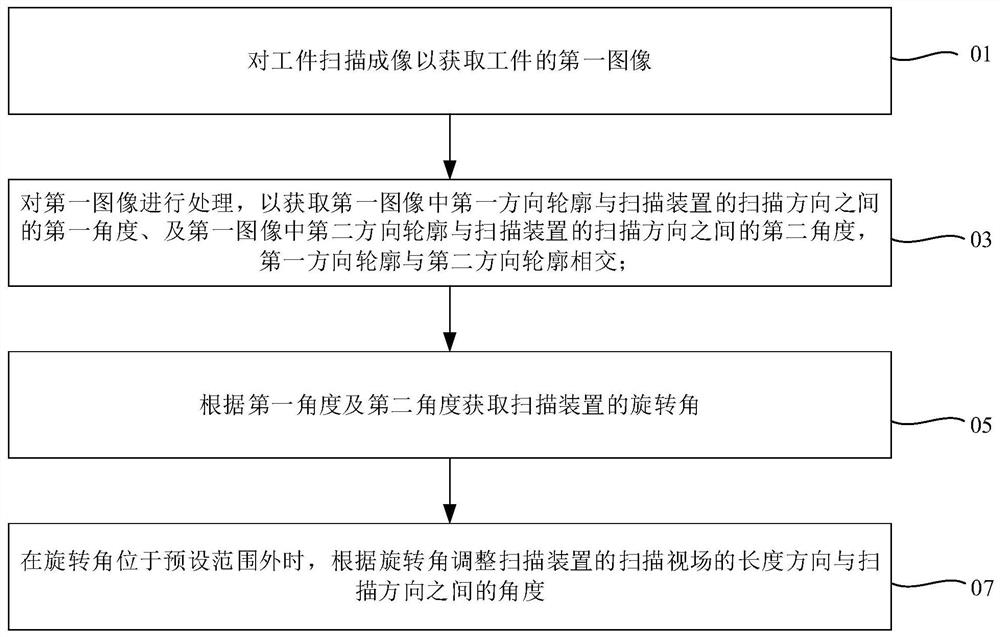
01:获取步骤:对工件200扫描成像以获取工件200的第一图像P1;
03:处理步骤:对第一图像P1进行处理,以获取第一图像P1中第一方向轮廓与扫描装置10的扫描方向F1之间的第一角度、及第一图像P1中第二方向轮廓与扫描装置10的扫描方向F1之间的第二角度,第一方向轮廓与第二方向轮廓相交;
05:计算步骤:根据第一角度及第二角度获取扫描装置10的旋转角;及
07:调整步骤:在旋转角位于预设范围外时,根据旋转角调整扫描装置10的扫描视场的长度方向F2与扫描方向F1之间的角度。
具体的,本申请还提供一种检测设备100,检测设备100包括扫描装置10、一个或多个处理器30及机台50。其中,扫描装置10可以是相机、或具有电荷耦合器件(ChargeCoupled Device,CCD)或接触式图像感应装置(Contact Image Sensor,CIS)的图像采集装置,工件200承载在机台50上,扫描装置10对机台50上的工件200按预定方向进行扫描成像,以供检测设备100进行检测。一个或多个处理器30用于执行03、05及07中的方法。即,扫描装置10用于执行获取步骤:对工件200扫描成像以获取工件200的第一图像P1。一个或多个处理器30用于执行:处理步骤、计算步骤、及调整步骤。也即,一个或多个处理器30用于执行:对第一图像P1进行处理,以获取第一图像P1中第一方向轮廓与扫描装置10的扫描方向F1之间的第一角度、及第一图像P1中第二方向轮廓与扫描装置10的扫描方向F1之间的第二角度,第一方向轮廓与第二方向轮廓相交;根据第一角度及第二角度获取扫描装置10的旋转角;及在旋转角位于预设范围外时,根据旋转角调整扫描装置10的扫描视场的长度方向F2与扫描方向F1之间的角度。
其中,第一方向为第一图像P1中的小方格P1a中的宽度的延伸方向,与扫描视场的长度方向F2基本一致;第二方向为第一图像P1的小方格P1a中的长度的延伸方向,与扫描方向F1基本一致。通常,扫描装置10初装时的旋转误差不会太大,一方面由于安装扫描装置10的结构限位不会让旋转角度误差超过±5°,因此,本申请中获取第一角度、第二角度均为锐角,根据第一角度和第二角度计算得到的旋转角的取值范围在±5°之间,而不是±90°,由此可大幅度节省处理器30的计算时间,提高计算速度。
在半导体检测领域,对工件200进行检测时,需将工件200放置在机台50上,再利用扫描装置10对工件200表面采用直线扫描成像的方法获取工件图像,接着根据如图4所示的工件图像来检测工件200表面的信息,例如是否存在缺陷,若存在缺陷,缺陷的类型如何。然而,由于扫描装置10安装时扫描视场的长度方向F2相对扫描方向F1存在旋转误差,旋转误差容易导致扫描得到的工件图像畸变失真,如图4所示。而在扫描装置10安装时扫描视场的长度方向F2相对扫描方向F1没有旋转误差的情况下,如图5、图6所示,扫描装置10的扫描视场的长度方向F2与扫描方向F1垂直,扫描装置10对工件200扫描成像时得到的工件图案是方正的,没有失真。为了避免工件图像产生畸变失真,则需要调试扫描装置10,目前的调试技术,需要保存工件图像,通过目测的方式来获取扫描装置10的调整角度,调整效率低下。
本申请的调整方法中,通过计算第一图像P1中第一方向轮廓与扫描装置10的扫描方向F1之间的第一角度、及第二方向轮廓与扫描装置10的扫描方向F1之间的第二角度,以获取扫描装置10的旋转角,并根据旋转角调整扫描装置10的扫描视场的长度方向F2与扫描方向F1之间的角度,相较于目测方式调整扫描装置10,提高了扫描装置10的调整效率。
请结合图2至图4,具体的,承载在机台50上的工件200可以是晶圆(有图案晶圆、无图案晶圆)、芯片、显示屏面板、玻璃、透镜等精密器件,本申请中的工件200以晶圆为实施例对调整方法进行说明,需要说明的是,本申请的调整方法也适用于其他精密器件,在此不一一展开说明。在本申请的实施例中,由于晶圆的图案是周期分布的,扫描装置10对工件200进行扫描成像后得到的第一图像P1中存在重复性出现的小方格图像(如图4所示),第一图像P1中的小方格存在分界明显的第一方向轮廓和第二方向轮廓,其中,第一方向轮廓与第二方向轮廓相交,即,第一方向轮廓为小方格中基本垂直于扫描方向F1的竖直线,第二方向轮廓为小方格中基本平行于扫描方向F1的横直线。获取第一图像P1并识别第一图像P1中的第一方向轮廓和第二方向轮廓后,对第一图像P1进行处理,从而获取第一方向轮廓和扫描方向F1之间的第一角度、及第二方向轮廓和扫描方向F1之间的第二角度,然后根据第一角度和第二角度来计算得到扫描装置10的旋转角,最后一个或多个处理器30根据旋转角控制调整扫描装置10的扫描视场的长度方向F2与扫描方向F1之间的角度,使得扫描装置10可快速调整至正确的角度,提高了扫描装置10的调整效率,从而使得扫描装置10扫描工件200的图像无失真现象,提高检测精度。
请参阅图7、图8及图10,在某些实施方式中,03:对第一图像P1进行处理,以获取第一图像P1中第一方向轮廓与扫描装置10的扫描方向F1(图4所示)之间的第一角度、及第一图像P1中第二方向轮廓与扫描装置10的扫描方向F1(图4所示)之间的第二角度,包括:
031:对第一图像P1进行二值化处理,以获取第二图像(图未示出);
033:对第二图像P2进行边缘提取,以获取第三图像P3;
035:对第三图像P3进行霍夫变换,以获取第四图像P4;
037:提取第四图像P4中的沿第一方向的第一长直线L1与沿第二方向的第二长直线L2;及
039:计算第一长直线L1与扫描方向F1之间的角度以作为第一角度,及计算第二长直线L2与扫描方向F2之间的角度以作为第二角度。
请结合图4,一个或多个处理器30还用于执行031、033、035、037及039中的方法。即,一个或多个处理器30还用于:对第一图像P1进行二值化处理,以获取第二图像(图未示出);对第二图像P2进行边缘提取,以获取第三图像P3;对第三图像P3进行霍夫变换,以获取第四图像P4;提取第四图像P4中的沿第一方向的第一长直线L1与沿第二方向的第二长直线L2;及计算第一长直线L1与扫描方向F1之间的角度以作为第一角度,及计算第二长直线L2与扫描方向F2之间的角度以作为第二角度。
扫描装置10对工件200进行扫描成像后,对第一图像P1进行二值化处理,以获取二值化图像(即,第二图像)。具体的,第一图像P1的像素阵列的每个像素点均包括R、G、B三个颜色变量,每个像素点的R、G、B变量的值可能相同也可能不相同。获取第一图像P1后,首先对第一图像P1进行灰度化,以使像素阵列中的每个像素点都满足R=G=B,即红色变量的值、绿色变量的值、及蓝色变量的值相等;对灰度化后的第一图像P1进行二值化,即,将灰度化后的第一图像P1中每个像素点的灰度值转化为0或255,其中,将小于一预设阈值的灰度值转化为0(黑色),将大于预设阈值的灰度值转化为255(白色)。在一个例子中,预设阈值为127(相当于0~255的中数),将灰度值小于等于127的变为0(黑色),将灰度值大于127的变换为255(白色),使得处理器30的计算量小且速度快,直至将灰度化后的第一图像P1所有像素点对应的灰度值都转换为0或255,从而获取第二图像。在另一个例子中,对灰度化后的第一图像P1对应的像素点阵列中的所有像素点的灰度值进行求平均计算,将平均值作为预设阈值,将像素点阵列中的每个像素点的灰度值与平均值进行比较,小于等于平均值的像素点对应的灰度值转化为0(黑色),大于平均值的像素点对应的灰度值转化为255(白色),以获取对比明显的二值化图像。
请结合图8,一个或多个处理器30获取第二图像(二值化图像)后,利用边缘提取算法将第二图像中的轮廓线提取出来,以获取提取边缘后的第三图像P3。具体的,边缘提取指数字图像(如二值化图像)处理中,对于图像轮廓的一个处理,对于边界处,将灰度值变化剧烈的地方定义为边缘。利用边缘增强算子,以突出第二图像中的局部(小方格)边缘(如图9所示),定义像素的边缘强度,通过设置阈值的方法提取边缘点集,由于噪声和模糊的存在,监测到的边界可能会变宽或者在某点处发生间断,因此,在用边缘算子提取出反应灰度变化的边缘点集后,在边缘点集中剔除某些边界点或填补边界间断点,并将这些边缘连接成完整的线。最后得到提取边缘后的第三图像P3。
请结合图10,由于检测设备100对工件200整体进行扫描成像,需要调整扫描装置10相对整个工件200的角度,因此,一个或多个处理器30还需要对第三图像P3进行霍夫变换,通过将图像坐标空间转换到参数空间,来实现直线与曲线的拟合,从而将第三图像P3中的各个小方格的边缘连接起来,以提取宽度和长度大于两个小方格的直线,例如,沿第一方向的第一长直线L1和沿第二方向的第二长直线L2。一个或多个处理器30计算第三图像P3中某一第一长直线L1与扫描方向F1之间的角度以作为第一角度,计算第三图像P3中某一第二长直线L2与扫描方向F1之间的角度以作为第二角度,并根据第一角度和第二角度来获取扫描装置10的旋转角,最后根据旋转角来调整扫描装置10的扫描视场的长度方向F2与扫描方向F1之间的角度,以使扫描装置10调整至正确的角度,从而使得扫描装置10对工件200进行扫描成像获得的图像不存在失真现象,保证检测设备100的检测精度。
请参阅图10及图11,在某些实施方式中,第一长直线的条数为多条,039:计算第一长直线L1与扫描方向F1之间的角度以作为第一角度,还可包括:
0391:计算每条第一长直线L1与扫描方向F1之间的第一夹角;及
0392:根据多个第一夹角获取第一角度。
请结合图2,一个或多个处理器30还用于执行0391及0392中的方法。即,一个或多个处理器30还用于:计算每条第一长直线L1与扫描方向F1之间的第一夹角;及根据多个第一夹角获取第一角度。
在一个实施例中,一个或多个处理器30计算第四图像P4中每条第一长直线L1与扫描方向F1之间的第一夹角,并对多个第一夹角进行求和再求平均以作为第一角度,一个或多个处理器30根据第一角度计算得到的扫描装置10的旋转角更加准确。例如,请结合图10,第三图像P3中包括八条沿第一方向的第一长直线L1,每条第一长直线L1与扫描方向F1之间的夹角分别为α11、α12、α13、α14、α15、α16、α17、α18,则第一角度可记为T1,T1=(α11+α12+α13+α14+α15+α16+α17+α18)/8。
请参阅图10及图12,在某些实施方式中,第二长直线的条数为多条,039:计算第二长直线L2与扫描方向F2之间的角度以作为第二角度,还可包括:
0393:计算每条第二长直线L2与扫描方向F1之间的第二夹角;及
0394:根据多个第二夹角获取第二角度。
请结合图2,一个或多个处理器30还用于执行0393及0394中的方法。即,一个或多个处理器30还用于:计算每条第二长直线L2与扫描方向F1之间的第二夹角;及根据多个第二夹角获取第二角度。
同样的,在计算第二角度时,一个或多个处理器30可通过计算第四图像P4中每条第二长直线L2与扫描方向F1之间的第二夹角,并对多个第二夹角进行求和再求平均以作为第二角度,一个或多个处理器30根据第二角度计算得到的扫描装置10的旋转角更加准确。例如,请结合图10,第三图像P3中包括三条沿第二方向的第二长直线L2,每条第二长直线L2与扫描方向F1之间的夹角分别为α21、α22、α23,则第二角度可记为T2,T2=(α21+α22+α23)/3。
在某些实施方式中,一个或多个处理器30计算得到第一角度T1和第二角度T2,并根据dT=T1-T2-90°计算得到扫描装置10的旋转角dT,旋转角dT即为扫描装置的扫描视场的长度方向F2与扫描方向F1达到垂直时需要补偿的角度误差,根据旋转角dT调整扫描装置10的扫描视场的长度方向F2与扫描方向F1的角度,即可将扫描装置10调整至正确的位置(扫描视场的长度方向F2与扫描方向F1相互垂直的位置)。
请参阅图2、图13,在某些实施方式中,在根据旋转角调整扫描装置10的扫描视场的长度方向F2与扫描方向F1之间的角度后,扫描装置10再执行获取步骤,一个或多个处理器30再执行处理步骤、计算步骤后判断旋转角是否在预设范围内,预设范围可以是[0,0.5°],若旋转角在预设范围内,扫描装置10的扫描视场的长度方向F2与扫描方向F1基本垂直,如图5所示,可认为扫描装置10已到位(即到达扫描视场的长度方向F2与扫描方向F1相互垂直的位置),扫描得到的图像中不存在失真现象,能够保证检测设备100的检测精度,即可停止执行后续步骤。若旋转角度不在预设范围内,扫描装置10的扫描视场的长度方向F2与扫描方向F1倾斜角度较大,如图3所示,一个或多个处理器30还要执行调整步骤,接着循环执行获取步骤:对工件200扫描成像以获取工件200的第一图像P1;执行处理步骤:对第一图像P1进行处理,以获取第一图像P1中第一方向轮廓与扫描装置10的扫描方向F1之间的第一角度、及第一图像P1中第二方向轮廓与扫描装置10的扫描方向F1之间的第二角度,第一方向轮廓与第二方向轮廓相交;执行计算步骤:根据第一角度及第二角度获取扫描装置10的旋转角;若旋转角在预设范围内,即可停止执行后续步骤,若旋转角度不在预设范围内,一个或多个处理器30还要执行调整步骤:在旋转角位于预设范围外时,根据旋转角调整扫描装置10的扫描视场的长度方向F2与扫描方向F1之间的角度。如此循环执行,直至旋转角在预设范围内为止。
请参阅图14,本申请还提供一种存储有计算机程序301的非易失性计算机可读存储介质300。当计算机程序301被一个或多个处理器30执行时,使得一个或多个处理器30执行上述任一实施方式的调整方法。
例如,当计算机程序301被一个或多个处理器30执行时,使得一个或多个处理器30执行以下调整方法:
01:获取步骤:对工件200扫描成像以获取工件200的第一图像P1;
03:处理步骤:对第一图像P1进行处理,以获取第一图像P1中第一方向轮廓与扫描装置10的扫描方向F1之间的第一角度、及第一图像P1中第二方向轮廓与扫描装置10的扫描方向F1之间的第二角度,第一方向轮廓与第二方向轮廓相交;
05:计算步骤:根据第一角度及第二角度获取扫描装置10的旋转角;及
07:调整步骤:在旋转角位于预设范围外时,根据旋转角调整扫描装置10的扫描视场的长度方向F2与扫描方向F1之间的角度。
还例如,当计算机程序301被一个或多个处理器30执行时,使得一个或多个处理器30执行以下调整方法:
01:获取步骤:对工件200扫描成像以获取工件200的第一图像P1;
031:对第一图像P1进行二值化处理,以获取第二图像;
033:对第二图像P2进行边缘提取,以获取第三图像P3;
035:对第三图像P3进行霍夫变换,以获取第四图像P4;
037:提取第四图像P4中的沿第一方向的第一长直线L1与沿第二方向的第二长直线L2;
039:计算第一长直线L1与扫描方向F1之间的角度以作为第一角度,及计算第二长直线L2与扫描方向F2之间的角度以作为第二角度。05:计算步骤:根据第一角度及第二角度获取扫描装置10的旋转角;及
07:调整步骤:在旋转角位于预设范围外时,根据旋转角调整扫描装置10的扫描视场的长度方向F2与扫描方向F1之间的角度。
还例如,当计算机程序301被一个或多个处理器30执行时,使得一个或多个处理器30执行以下调整方法:
01:获取步骤:对工件200扫描成像以获取工件200的第一图像P1;
031:对第一图像P1进行二值化处理,以获取第二图像;
033:对第二图像P2进行边缘提取,以获取第三图像P3;
035:对第三图像P3进行霍夫变换,以获取第四图像P4;
037:提取第四图像P4中的沿第一方向的第一长直线L1与沿第二方向的第二长直线L2;
0391:计算每条第一长直线L1与扫描方向F1之间的第一夹角;
0392:根据多个第一夹角获取第一角度;
0393:计算每条第二长直线L2与扫描方向F1之间的第二夹角;
0394:根据多个第二夹角获取第二角度;及
07:调整步骤:在旋转角位于预设范围外时,根据旋转角调整扫描装置10的扫描视场的长度方向F2与扫描方向F1之间的角度。
在本说明书的描述中,参考术语“某些实施方式”、“一个实施方式”、“一些实施方式”、“示意性实施方式”、“示例”、“具体示例”、或“一些示例”的描述意指结合所述实施方式或示例描述的具体特征、结构、材料或者特点包含于本申请的至少一个实施方式或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施方式或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施方式或示例中以合适的方式结合。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个所述特征。在本申请的描述中,“多个”的含义是至少两个,例如两个,三个,除非另有明确具体的限定。
尽管上面已经示出和描述了本申请的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本申请的限制,本领域的普通技术人员在本申请的范围内可以对上述实施例进行变化、修改、替换和变型,本申请的范围由权利要求及其等同物限定。
- 调整方法、检测设备及计算机可读存储介质
- 库存调整方法、库存调整装置和计算机可读存储介质