一种电驱手摇混合式提升机
文献发布时间:2023-06-19 12:02:28
技术领域
本发明涉及一种提升机,具体涉及一种电驱手摇混合式提升机。
背景技术
提升机是通过动力机械拖动柔性件及所运输的货物上下运动完成作业过程的装置。提升机用途广泛,形式多样,一般情况都是功率较大、提升能力较强的大型机械设备。而小型提升机由于其外形灵巧,应用场合则更加复杂。小型提升机既拥有较强的提升能力,精确的速度控制,又可以适应狭小的操作空间,是小型提升机研究的方向。而现有的提升机功能单一,手动和电动是分开的,在停电或电机故障的情况下,电动提升机不能工作。
发明内容
本发明的目的是提供一种电驱手摇混合式提升机,解决了现有电动提升机在停电或电机故障的情况下不能工作的问题,能够实现手动和电动大减速比输出,而且能够避免出现咬绳情况。
为了达到上述目的,本发明提供了一种电驱手摇混合式提升机,该提升机包含:机架,其两端均具有滚筒安装槽,且该滚筒安装槽两侧的前端均具有外延臂;滚筒,其具有空腔,其外侧壁上沿其轴向设置螺旋槽,其限位在所述滚筒安装槽内且可相对滚筒安装槽转动,其两端均具有外齿圈驱动副;齿轮传动机构,其包含:压紧辊子一、压辊轴和传动齿轮一,该压辊轴穿设在两个滚筒安装槽内且与滚筒安装槽的侧壁转动连接,压辊轴处于所述滚筒的外周且其中心轴线与所述滚筒的中心轴线平行;该压紧辊子一和传动齿轮一均套置并固定在压辊轴上,且压紧辊子一与所述滚筒相对,传动齿轮一与外齿圈驱动副相啮合;压紧辊子二,其两端与所述滚筒安装槽的两侧转动连接,其处于所述滚筒的外周且其中心轴线与所述滚筒的中心轴线平行;输绳辊子,其处于所述外延臂的端部,与所述外延臂转动连接;排丝机构,其设置在所述滚筒安装槽内,处于所述滚筒和输绳辊子之间,包含:导向轴和排丝移动件,该导向轴穿设在两个滚筒安装槽内且两端分别与两个滚筒安装槽的侧壁转动连接,该导向轴与所述滚筒的中心轴线平行;该排丝移动件上设置有穿绳孔,排丝移动件与所述滚筒相对的面上设置有球面突起,该球面突起抵至于所述螺旋槽内;钢丝绳,其绕置在所述滚筒的螺旋槽内,且经所述排丝机构的穿绳孔和输绳辊子后伸出;行星传动机构,其设置在所述滚筒的空腔内;动力源,其固定在两个滚筒安装槽之间,其输出轴与一个或两个滚筒安装槽内的滚筒之间通过所述行星传动机构传动连接;手摇输入轴,其设置在所述机架一端的滚筒安装槽的外侧壁上;链轮传动机构,其设置在所述滚筒安装槽的侧壁上且位于所述外延臂处,并套置和固定在所述输绳辊子的末端和导向轴上,与所述外齿圈驱动副相啮合,用于带动所述输绳辊子和导向轴转动;蜗轮蜗杆副,其设置在所述机架一端的滚筒安装槽的侧壁的空腔内,与所述手摇输入轴处于所述机架的同一端,其包含:蜗轮和蜗杆,该蜗杆的中轴线与蜗轮的中轴线相垂直,该蜗轮的外壁上具有外齿轮和光轴,该蜗轮的外齿轮与蜗杆外侧壁上的螺纹相啮合,蜗轮的光轴端与所述行星传动机构传动连接,且该蜗轮的光轴端与滚筒可相对转动;以及锥齿轮副,其设置在所述机架一端的滚筒安装槽上,与所述手摇输入轴处于所述机架的同一端,包含:锥齿轮一和锥齿轮二,该锥齿轮一套置并固定在所述蜗轮蜗杆副的蜗杆的外侧壁上,所述锥齿轮二与锥齿轮一的中轴线相垂直且锥齿轮二与锥齿轮一相啮合,该锥齿轮二的中心轴与所述手摇输入轴固定连接。
优选地,所述行星传动机构包含:NGW行星传动机构和NGWN行星传动机构;其中,所述NGW行星传动机构包含:太阳轮一、齿圈一、行星轮一和行星架一;所述NGWN行星传动机构包含:齿圈二、太阳轮二、行星轮二、两级行星架、行星轮三和齿圈三;所述太阳轮一套置并固定在动力源的输出轴的外侧壁上,行星轮一周向设置在所述太阳轮一的外侧壁上并与太阳轮一的外侧壁相啮合,行星架安装在所述滚筒的空腔内壁上且可相对滚筒的内壁转动,所述行星轮一的转轴固定在所述行星架上,所述行星轮一转动设置在其转轴上,所述齿圈一具有内齿圈且套置在所述行星轮一上并与行星轮一相啮合,该齿圈一固定在所述滚筒的空腔内壁上;所述太阳轮二固定在所述行星架一的中心轴处,所述行星轮二周向设置在所述太阳轮二的外侧壁上并与太阳轮二的外侧壁相啮合,所述两级行星架安装在所述滚筒的空腔内壁上且可相对滚筒的内壁转动,行星轮二和行星轮三的转轴分别固定在所述两级行星架的两个面上,所述行星轮二转动设置在其转轴上,所述行星轮三固定设置在其转轴上;所述齿圈二具有内齿圈且套置在所述行星轮二上并与行星轮二相啮合,该齿圈二的外壁固定在所述滚筒的空腔内壁上;所述齿圈三固定在蜗轮的光轴端的内壁上,并与所述行星轮三相啮合。
优选地,所述链轮传动机构包含:传动齿轮二、传动齿轮三、传动齿轮四和链条;其中,所述传动齿轮二和传动齿轮三均套置并固定在所述导向轴上,且所述传动齿轮二处于滚筒安装槽的内侧壁处并与所述外齿圈驱动副相啮合,所述传动齿轮三处于滚筒安装槽的外侧壁处;所述传动齿轮四与传动齿轮三处于滚筒安装槽的同一侧壁处,套置并固定在所述输绳辊子的末端,所述链条套置在所述传动齿轮四和传动齿轮三上并啮合连接。
优选地,所述输绳辊子和导向轴之间设置有固定轴,固定轴的两端分别固定在滚筒安装槽的两侧壁上,所述钢丝绳经排丝移动件的穿绳孔后从输绳辊子和固定轴之间的间隙穿出。
优选地,所述输绳辊子的线速度高于所述滚筒的线速度。
优选地,所述动力源选用伺服电机,该伺服电机为双向输出或单向输出的伺服电机。
本发明的电驱手摇混合式提升机,解决了现有电动提升机在停电或电机故障的情况下不能工作的问题,具有以下优点:
(1)本发明的提升机,两种工作模式可以切换,分别为手动模式和电动模式,在紧急状态下,如停电或电机故障,可以采用手动模式;在电动模式下,通过通过行星传动实现大减速比电驱动;在手动模式下,通过锥齿轮副、蜗轮蜗杆副和NGWN行星传动机构实现大减速比手动驱动;本发明的提升机体积小,可以在同等体积条件下实现大于3倍的普通行星传动的减速比,重量轻,便于使用;
(2)本发明的提升机,通过蜗轮蜗杆副、锥齿轮副和链轮传动机构的结构设计,实现了手动操作带动两个滚筒转动,同时压紧辊子和输绳辊子转动,保证钢丝绳顺利输出,且解决了提升机钢丝绳空载输出的脱槽问题;
(3)本发明的提升机,通过增加排丝机构,避免出现提升机钢丝绳回收产生的咬绳问题;
(4)本发明的提升机,通过调整滚筒长度和延伸臂结构,解决现有吊钩直接从滚筒出来以导致不易与重物衔接的问题。
附图说明
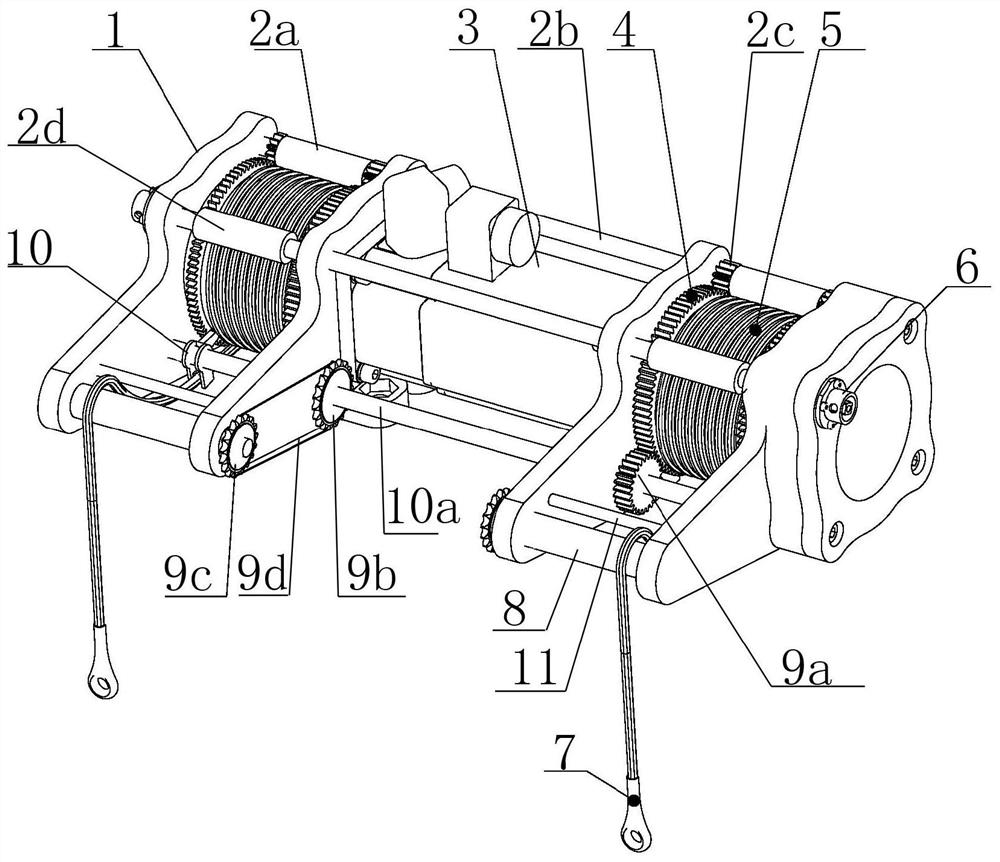
图1为本发明的电驱手摇混合式提升机的结构示意图。
图2为本发明的电驱手摇混合式提升机的部分剖面图。
图3为本发明的电驱手摇混合式提升机的剖面图。
具体实施方式
下面将对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1
一种电驱手摇混合式提升机,参见图1-3,该提升机包含:机架1、滚筒5、齿轮传动机构、压紧辊子二2d、输绳辊子8、排丝机构10、钢丝绳7、行星传动机构、动力源3、手摇输入轴6、链轮传动机构、蜗轮蜗杆副和锥齿轮副。其中,机架1的两端均具有滚筒安装槽,且该滚筒安装槽两侧的前端均具有外延臂。滚筒5具有空腔,其外侧壁上沿其轴向设置螺旋槽,其限位在滚筒安装槽内且可相对滚筒安装槽转动,其两端均具有外齿圈驱动副4。齿轮传动机构处于两个滚筒5的外周,用于两个滚筒5之间的传动,于将其中一个滚筒5的旋转传递给另一个滚筒5。压紧辊子二2d的两端与滚筒安装槽的两侧转动连接,其处于滚筒5的外周且其中心轴线与滚筒5的中心轴线平行。输绳辊子8处于外延臂的端部,与外延臂转动连接。排丝机构10设置在滚筒安装槽内,处于滚筒5和输绳辊子8之间,用于调整钢丝绳7的方向,并确保钢丝绳7不缠绕。钢丝绳7绕置在滚筒5的螺旋槽内,且经排丝机构10的穿绳孔和输绳辊子8后伸出。行星传动机构设置在滚筒5的空腔内。动力源3固定在两个滚筒安装槽之间,其输出轴5.1与一个或两个滚筒安装槽内的滚筒5之间通过行星传动机构传动连接。手摇输入轴6设置在机架1一端的滚筒安装槽的外侧壁上。链轮传动机构设置在滚筒安装槽的侧壁上且位于外延臂处,并套置和固定在输绳辊子8的末端和排丝机构10上,与外齿圈驱动副4相啮合,用于带动输绳辊子8和排丝机构10转动。蜗轮蜗杆副设置在机架1一端的滚筒安装槽的侧壁的空腔内,与手摇输入轴6处于机架1的同一端,与行星传动机构啮合连接。锥齿轮副设置在机架1一端的滚筒安装槽上,与手摇输入轴6处于机架1的同一端,用于将手摇输入轴6的转动传动至蜗杆。
上述齿轮传动机构包含:压紧辊子一2a、压辊轴2b和传动齿轮一2c。该压辊轴2c穿设在两个滚筒安装槽内且与滚筒安装槽的侧壁转动连接,压辊轴2c处于滚筒5的外周且其中心轴线与滚筒5的中心轴线平行;该压紧辊子一2a和传动齿轮一2c均套置并固定在压辊轴2b上,且压紧辊子一2a与滚筒5相对,传动齿轮一2c与外齿圈驱动副4相啮合。
上述排丝机构10包含:导向轴10a和排丝移动件10b,该导向轴10a穿设在两个滚筒安装槽内且两端分别与两个滚筒安装槽的侧壁转动连接,该导向轴10a与滚筒5的中心轴线平行;该排丝移动件上设置有穿绳孔,排丝移动件与滚筒5相对的面上设置有球面突起,该球面突起抵至于螺旋槽内。
上述蜗轮蜗杆副包含:蜗轮5.12和蜗杆5.13,该蜗杆5.13的中轴线与蜗轮5.12的中轴线相垂直,该蜗轮5.12的外壁上具有外齿轮和光轴,该蜗轮5.12的外齿轮与蜗杆5.13外侧壁上的螺纹相啮合,蜗轮5.12的光轴端与行星传动机构传动连接,且该蜗轮5.12的光轴端与滚筒5可相对转动。
上述锥齿轮副包含:锥齿轮一5.14和锥齿轮二5.15,该锥齿轮一5.14套置并固定在蜗轮蜗杆副的蜗杆5.13的外侧壁上,锥齿轮二5.15与锥齿轮一5.14的中轴线相垂直且锥齿轮二5.15与锥齿轮一5.14相啮合,该锥齿轮二5.15的中心轴与手摇输入轴6固定连接。
上述行星传动机构包含:NGW行星传动机构和NGWN行星传动机构;其中,NGW行星传动机构包含:太阳轮一5.2、齿圈一5.3、行星轮一5.4和行星架一5.5;NGWN行星传动机构包含:齿圈二5.6、太阳轮二5.7、行星轮二5.8、两级行星架5.9、行星轮三5.10和齿圈三5.11;太阳轮一5.2套置并固定在动力源3的输出轴5.1的外侧壁上,行星轮一5.4周向设置在太阳轮一5.2的外侧壁上并与太阳轮一5.2的外侧壁相啮合,行星架一5.5安装在滚筒5的空腔内壁上且可相对滚筒的内壁转动,行星轮一5.4的转轴固定在行星架一5.5上,行星轮一5.4转动设置在其转轴上,齿圈一5.3具有内齿圈且套置在行星轮一5.4上并与行星轮一5.4相啮合,该齿圈一5.3固定在滚筒5的空腔内壁上;太阳轮二5.7固定在行星架一5.5的中心轴处,行星轮二5.8周向设置在太阳轮二5.7的外侧壁上并与太阳轮二5.7的外侧壁相啮合,两级行星架5.9安装在滚筒5的空腔内壁上且可相对滚筒的内壁转动,行星轮二5.8和行星轮三5.10的转轴分别固定在两级行星架5.9的两个面上,行星轮二5.8转动设置在其转轴上,行星轮三5.10固定设置在其转轴上;齿圈二5.6具有内齿圈且套置在行星轮二5.8上并与行星轮二5.8相啮合,该齿圈二5.6的外壁固定在滚筒5的空腔内壁上;齿圈三5.11固定在蜗轮5.12的光轴端的内壁上,并与行星轮三5.10相啮合。
上述链轮传动机构包含:传动齿轮二9a、传动齿轮三9b、传动齿轮四9c和链条9d;其中,传动齿轮二9a和传动齿轮三9b均套置并固定在导向轴10a上,且传动齿轮二9a处于滚筒安装槽的内侧壁处并与外齿圈驱动副4相啮合,传动齿轮三9b处于滚筒安装槽的外侧壁处;传动齿轮四9c与传动齿轮三9b处于滚筒安装槽的同一侧壁处,套置并固定在输绳辊子8的末端,链条9d套置在传动齿轮四9c和传动齿轮三9b上并啮合连接。
上述动力源3选用伺服电机,该伺服电机为双向输出或单向输出的伺服电机。通过对动力源3的控制实现滚筒5旋转的速度调节,从而可以精确控制提升的快慢及提升物所要到达的准确位置。
上述输绳辊子8和导向轴10a之间设置有固定轴11,固定轴11的两端分别固定在滚筒安装槽的两侧壁上,钢丝绳7经排丝移动件10b的穿绳孔后从输绳辊子8和固定轴11之间的间隙穿出。
本发明的电驱手摇混合式提升机的工作原理,具体如下:
在正常工作状态下,滚筒5由动力源3驱动,在紧急状态下,切换成手摇驱动模式。
在正常工作状态下,动力源3通过输出轴5.1将动力传递给太阳轮一5.2,齿圈一5.3的位置是固定不变的,因此太阳轮一5.2带动行星轮一5.4在与其同方向公转的同时逆方向自转,从而带动行星架一5.5与太阳轮一5.2同方向转动且速度减小。经过NGW行星传动机构减速后,由行星架一5.5传递给太阳轮二5.7,此时蜗轮蜗杆副处于自锁状态,行星轮三5.10和齿圈三5.11固定不转动,因此两级行星架5.9固定不转动,太阳轮二5.7只能带动行星轮二5.8进行反向自转,从而带动齿圈二5.6转动,再经过NGWN行星传动机构减速后,由齿圈二5.6传递至滚筒5,带动滚筒5转动。最终,滚筒5的输出转速为NGW行星传动机构与NGWN行星传动机构减速比的乘积,通过行星传动实现大减速比电驱动。
在滚筒5转动的过程中,外齿圈驱动副4同步转动,从而带动传动齿轮二9a和传动齿轮一2c均转动,传动齿轮二9a带动导向轴10a一起转动,传动齿轮三9b随导向轴10a一起转动,经链条9d传动,带动传动齿轮四9c一起转动,传动齿轮四9c带动输绳辊子8转动,通过配比使输绳辊子8的线速度稍高于滚筒5的线速度,则保证钢丝绳7的张紧。而且,在滚筒5转动的过程中,排丝移动件10b的球面突起在滚筒5的螺旋槽内相对移动,通过滚筒5的旋转,实现排丝移动件10b沿导向轴10a作直线运动。并且,传动齿轮一2c带动压辊轴2b和压紧辊子一2a一起转动,压紧辊子二2d也可相对滚筒5转动,压紧辊子一2a和压紧辊子二2d的旋转,能够保证钢丝绳7的紧密排布或顺畅输出,而排丝移动件10b的移动过程中,保证钢丝绳7排布整齐,不咬线,并通过排丝移动件10b、输绳辊子8和固定轴11起到对钢丝绳7输出方向的调整,从而保证顺利完成输绳或提升作业。
当动力源3为双输出伺服电机时,驱动两侧的滚筒5同时旋转,保证两侧滚筒5旋转同步。当动力源3为单输出伺服电机时,驱动一侧的滚筒5旋转,动力由一侧的外齿圈驱动副4、传动齿轮一2c和传动齿轮二9a传递至另一侧的传动齿轮一2c、传动齿轮二9a和外齿圈驱动副4,由另一侧的外齿圈驱动副4带动滚筒5旋转,从而实现双侧同步转动。单侧驱动形式较双侧驱动形式的整机重量减轻。
在紧急状态下,动力源3处于失电或故障状态,输出轴5.1和太阳轮一5.2均固定不转,NGW行星传动机构不发挥作用。此时,通过手摇输入轴6手动输入动力,经过锥齿轮副传动至蜗轮蜗杆副,再经蜗轮蜗杆副带动NGWN行星传动机构中的行星轮三5.10绕齿圈三5.11的中心转动,并带动两级行星架5.9一起转动,此时太阳轮二5.7不做转动,从而使行星轮二5.8自转,带动齿圈二5.6转动,由齿圈二5.6传递至该侧的滚筒5,带动该侧的滚筒5转动,并通过外齿圈驱动副4、传动齿轮一2c和传动齿轮二9a传动至另一侧的滚筒5。此时,滚筒5的输出转速为锥齿轮副、蜗轮蜗杆副、NGWN行星传动机构减速比的乘积,通过锥齿轮副、蜗轮蜗杆副和NGWN行星传动机构实现大减速比手动驱动,完成输绳或提升作业。
尽管本发明的内容已经通过上述优选实施例作了详细介绍,但应当认识到上述的描述不应被认为是对本发明的限制。在本领域技术人员阅读了上述内容后,对于本发明的多种修改和替代都将是显而易见的。因此,本发明的保护范围应由所附的权利要求来限定。
- 一种电驱手摇混合式提升机
- 一种用于手摇病床的外置电驱调节装置