一种适配沙滩清洁机器人的垃圾筛选收集箱
文献发布时间:2024-01-17 01:14:25
技术领域
本发明涉及垃圾收集领域,特别涉及一种适配沙滩清洁机器人的垃圾筛选收集箱。
背景技术
随着人们环保意识的逐渐增强,人们对于环境卫生的要求也越来越高,社会上也相继出现了各种垃圾清理和收集装置。其中,对于沙滩上的垃圾清理工作而言,如公开号为CN113463558A的中国发明专利所公开的机器人一样,市面上也出现了一系列用于清理沙滩垃圾的机器人。
但是,由于沙滩地面的特殊性,沙滩垃圾中难以避免地会掺杂有一些沙子,在清理垃圾的过程中,这些沙子可能会随着垃圾一同被拾取并装入收集箱中。在后续对收集箱中的垃圾进行回收处理的过程中,这些细沙可能会影响处理的效果甚至可能会影响机器设备的工作。
发明内容
本发明的目的在于,提供一种适配沙滩清洁机器人的垃圾筛选收集箱。本发明可以对沙滩垃圾中的沙子进行过滤,方便后续对垃圾的回收处理工作,在过滤沙子的同时,还可以完成垃圾的初步分类,此外,配合连杆组件的驱动,能够有效减小设备整体的体积。
本发明的技术方案:一种适配沙滩清洁机器人的垃圾筛选收集箱,包括箱体,箱体的内部具有操作仓,所述操作仓的开口处经连杆组件连接有漏沙板,漏沙板的上方设置有托架,托架上设置有筛板;所述漏沙板的上侧设置有第一电机,第一电机的输出轴连接有圆盘,圆盘的边缘处设置有偏心轴,偏心轴的末端与托架的下侧部固定连接;所述漏沙板的上侧还设置有安装座,安装座的侧部铰接有摇杆,摇杆的上端与托架的上侧部铰接;所述漏沙板的下部设置有漏沙口,漏沙板的上侧部铰接有盖板;所述操作仓内设置有收集盒。
前述的适配沙滩清洁机器人的垃圾筛选收集箱中,所述连杆组件包括固定在操作仓内壁的电动推杆,电动推杆的伸缩端铰接有第一连杆;所述操作仓内壁设置有导向槽,导向槽内设置有滑块;所述第一连杆的一端与滑块相连接,第一连杆的另一端与漏沙板的表面铰接;所述操作仓的内壁铰接有第二连杆,第二连杆的侧部与第一连杆的侧部铰接,第二连杆的端部铰接有第三连杆,第三连杆的端部与漏沙板的表面铰接。
前述的适配沙滩清洁机器人的垃圾筛选收集箱中,所述操作仓内壁固定设置有卷线盒,卷线盒内设置有卷线电机,卷线电机的输出轴连接有卷线轮,卷线轮上缠绕有连接线,连接线的一端从卷线盒的前侧穿出并与漏沙板的上侧部相连接。
前述的适配沙滩清洁机器人的垃圾筛选收集箱中,所述托架呈上宽下窄式结构,所述筛板由上至下呈阶梯状结构。
前述的适配沙滩清洁机器人的垃圾筛选收集箱中,所述操作仓的内部设置有移动架,移动架的底部设置有移动轮,所述收集盒设置在移动架上;所述操作仓的内壁设置有限位槽,移动架的侧部设置有限位杆,限位杆的一端延伸至对应的限位槽内;所述箱体的侧部设置有与操作仓相连通的开口。
前述的适配沙滩清洁机器人的垃圾筛选收集箱中,所述箱体内部设置有安装腔,安装腔的内部设置有第二电机,第二电机的输出轴连接有齿轮;所述安装腔内设置有伸出臂,伸出臂的上侧设置有与齿轮相啮合的齿槽,伸出臂上设置有距离传感器;所述箱体的前侧设置有与安装腔相连通的通孔,通孔正对伸出臂设置。
前述的适配沙滩清洁机器人的垃圾筛选收集箱中,所述箱体内部设置有空腔,空腔内部设置有电源。
前述的适配沙滩清洁机器人的垃圾筛选收集箱中,所述漏沙板和盖板的表面均设置有连接板,对应的两个连接板之间相互铰接。
前述的适配沙滩清洁机器人的垃圾筛选收集箱中,所述移动架上设置有压力传感器。
前述的适配沙滩清洁机器人的垃圾筛选收集箱中,所述收集盒的数量为两个,并且靠近筛板一侧的收集盒的容积大于远离筛板的收集盒的容积。
与现有技术相比,本发明具有以下有益效果:
1、本发明中,箱体的内部具有操作仓,操作仓的开口处经连杆组件连接有漏沙板,漏沙板的上方设置有托架,托架上设置有筛板;漏沙板的上侧设置有第一电机,第一电机的输出轴连接有圆盘,圆盘的边缘处设置有偏心轴,偏心轴的末端与托架的下侧部固定连接;漏沙板的上侧还设置有安装座,安装座的侧部铰接有摇杆,摇杆的上端与托架的上侧部铰接;漏沙板的下部设置有漏沙口。使用时,通过连杆组件打开漏沙板,将筛板移出操作仓,启动第一电机,第一电机带动圆盘转动,从而带动偏心轴进行圆周运动,并且,偏心轴在转动过程中能够带动托架的下侧进行前后上下移动。托架移动的过程中,前侧的摇杆会随着托架往复摆动。清洁机器人将垃圾倒在筛板上,筛板随着托架运动的过程中,能够将垃圾逐渐向下颠,使得垃圾逐渐向操作仓内移动,并且,移动过程中,垃圾中的沙子会通过筛板落到漏沙板上,然后滑落至漏沙口并落到地面上,通过上述操作即可实现对垃圾中沙子进行过滤的功能,能够为后续对垃圾的处理回收工作带来方便,也能够降低细沙对回收处理设备工作造成的不利影响。
2、本发明中,漏沙板通过连杆组件与操作仓相连接,并且漏沙板的侧部铰接有盖板,其中,连杆组件包括固定在操作仓内壁的电动推杆,电动推杆的伸缩端铰接有第一连杆;所述操作仓内壁设置有导向槽,导向槽内设置有滑块;所述第一连杆的一端与滑块相连接,第一连杆的另一端与漏沙板的表面铰接;所述操作仓的内壁铰接有第二连杆,第二连杆的侧部与第一连杆的侧部铰接,第二连杆的端部铰接有第三连杆,第三连杆的端部与漏沙板的表面铰接。在使用时,通过连杆组件将漏沙板打开,进行筛沙工作,盖板在重力作用下下垂与地面接触,起到良好的支撑作用。使用完毕后,通过连杆组件带动漏沙板转动,将漏沙板移动至操作仓内,减小了设备的整体体积,并且盖板在自身重力作用下搭在漏沙板的上方,能够防止雨水等杂物落入到操作仓内。
3、本发明中,操作仓内壁固定设置有卷线盒,卷线盒内设置有卷线电机,卷线电机的输出轴连接有卷线轮,卷线轮上缠绕有连接线,连接线的一端从卷线盒的前侧穿出并与漏沙板的上侧部相连接。由于连杆组件在运行过程中,会承受漏沙板和盖板等结构较大的负荷,为了能够减轻连杆组件的负载,在开启漏沙板时,还能够启动卷线电机,卷线电机进行放线操作,由于连接线的一端与漏沙板相连接,能够分担一部分的拉力。在将漏沙板关闭时,可以使卷线电机进行收线操作,连接线收入到卷线盒内,能够拉动漏沙板向上转动,帮助连杆组件将漏沙板关闭。
4、本发明中,托架呈上宽下窄式结构,上侧宽能够方便垃圾更好地落入到托架上,下侧窄能够使得垃圾精准地落入到操作仓内部。托架上设置有筛板,所述筛板由上至下呈阶梯状结构,能够延长垃圾在筛板上的滞留时间,从而有更充分的时间对垃圾中的沙子进行过滤。
5、本发明中,收集盒的数量为两个,并且靠近筛板一侧的收集盒的容积大于远离筛板的收集盒的容积。在对沙子过滤的过程中,由于圆盘和偏心轴的转动使得筛板上下颠簸,从而使得垃圾在筛板上跳动,并沿着筛板逐渐向操作仓内移动,较轻的垃圾受到筛板的颠簸能够落入到远端的收集盒内,而较重的垃圾则会落入到近端的收集盒内,由于干垃圾和湿垃圾在质量上具有较明显的差异,通过上述操作能够对垃圾进行预分类处理,便于后续对垃圾的处理。
6、本发明中,箱体内部设置有安装腔,安装腔的内部设置有第二电机,第二电机的输出轴连接有齿轮;所述安装腔内设置有伸出臂,伸出臂的上侧设置有与齿轮相啮合的齿槽,伸出臂上设置有距离传感器,箱体的前侧设置有与安装腔相连通的通孔,通孔正对伸出臂设置。在使用时,可以事先启动第二电机,带动齿轮转动,从而带动伸出臂移动。伸出臂穿过通孔并向前伸出,如附图所示。当伸出臂移动至目标位置时,关闭第二电机,再使得清洁机器人向箱体靠近,伸出臂上的距离传感器能够感应清洁机器人与箱体之间的距离,当清洁机器人移动至合适区域时,停止移动,方便清洁机器人更好的将垃圾倒入垃圾收集箱中。
附图说明
图1是本发明中盖板关闭时的结构示意图;
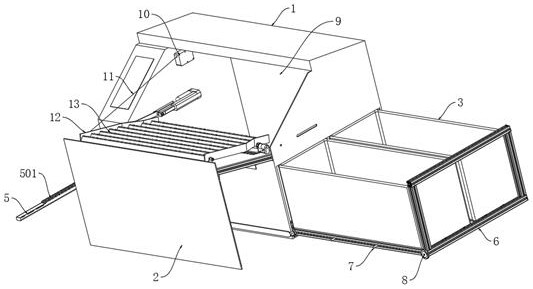
图2是本发明中盖板打开时的结构示意图;
图3是本发明中移动架抽出时的结构示意图;
图4是本发明中漏沙板打开时连杆组件的结构示意图;
图5是本发明中漏沙板关闭时连杆组件的结构示意图;
图6是本发明中漏沙板与第一电机的装配示意图;
图7是本发明中漏沙板与托架的装配示意图;
图8是本发明中安装腔和空腔内部的结构示意图。
附图中的标记为:1-箱体;2-盖板;3-收集盒;4-通孔;5-伸出臂;501-齿槽;6-移动架;7-限位杆;8-移动轮;9-操作仓;10-卷线盒;11-连接线;12-托架;13-筛板;14-漏沙板;15-漏沙口;16-第一电机;17-圆盘;18-偏心轴;19-电动推杆;20-第一连杆;21-第二连杆;22-第三连杆;23-导向槽;24-空腔;25-电源;26-安装腔;27-第二电机;28-齿轮;29-安装座;30-摇杆。
具体实施方式
下面结合附图和实施例对本发明作进一步的说明,但并不作为对本发明限制的依据。
实施例:一种适配沙滩清洁机器人的垃圾筛选收集箱,如附图1和附图8所示,包括箱体1,所述箱体1内部设置有安装腔26,安装腔26的内部设置有第二电机27,第二电机27的输出轴连接有齿轮28;所述安装腔26内设置有伸出臂5,伸出臂5的上侧设置有与齿轮28相啮合的齿槽501,伸出臂5上设置有距离传感器,距离传感器又叫位移传感器,能够感应物体之间的距离;所述箱体1的前侧设置有与安装腔26相连通的通孔4,通孔4正对伸出臂5设置。
在使用时,可以事先启动第二电机27,带动齿轮28转动,从而带动伸出臂5移动。伸出臂5穿过通孔4并向前伸出,如附图2所示。当伸出臂5移动至目标位置时,关闭第二电机27,再使得清洁机器人向箱体1靠近,伸出臂5上的距离传感器能够感应清洁机器人与箱体1之间的距离,当清洁机器人移动至合适区域时,停止移动,方便清洁机器人更好的将垃圾倒入垃圾收集箱中。
所述箱体1内部设置有空腔24,空腔24内部设置有电源25,由于沙滩上难以寻找其他供电设备,电源25能够为箱体1内各用电设备供电。进一步地,在电源25上可设置充电线,充电线沿着伸出臂5排布,在伸出臂5伸出后,能够通过充电线为清洁机器人充电。
箱体1的内部具有操作仓9,所述操作仓9的开口处经连杆组件连接有漏沙板14,如附图4和附图5所示,所述连杆组件包括固定在操作仓9内壁的电动推杆19,电动推杆19的伸缩端铰接有第一连杆20;所述操作仓9内壁设置有导向槽23,导向槽23内设置有滑块;所述第一连杆20的一端与滑块相连接,第一连杆20的另一端与漏沙板14的表面铰接;所述操作仓9的内壁铰接有第二连杆21,第二连杆21的侧部与第一连杆20的侧部铰接,第二连杆21的端部铰接有第三连杆22,第三连杆22的端部与漏沙板14的表面铰接。
初始状态下,漏沙板14为闭合状态,如附图5所示。在使用时,启动电动推杆19,电动推杆19延伸并推动第一连杆20向前移动,第一连杆20的端部带动漏沙板14向操作仓9的外部移动。由于第一连杆20的侧部与第二连杆21的侧部铰接,而第二连杆21的端部又与操作仓9内壁铰接,所以,第一连杆20移动的同时,能够带动第二连杆21转动,第二连杆21的上端通过第三连杆22带动漏沙板14向操作仓9外部移动。通过上述操作,即可将漏沙板14从操作仓9内转出。漏沙板14的上侧部铰接有盖板2,所述漏沙板14和盖板2的表面均设置有连接板,对应的两个连接板之间相互铰接。在漏沙板14移出操作仓9的过程中,盖板2会在重力作用下下垂,并与漏沙板14相对转动,直到盖板2的下端面遇地面相接触,能够起到支撑的作用,具体如附图3所示。在使用完毕后,只需要使电动推杆19收缩即可将漏沙板14关闭,具体过程为上述开启过程的逆过程,在此不做过多赘述。在漏沙板14转动并关闭后,盖板2会在重力作用下搭在漏沙板14的上侧,并且将操作仓9的开口处完全遮挡主,从而防止雨水等杂物落入操作仓9内。
所述操作仓9内壁固定设置有卷线盒10,卷线盒10内设置有卷线电机,卷线电机的输出轴连接有卷线轮,卷线轮上缠绕有连接线11,连接线11的一端从卷线盒10的前侧穿出并与漏沙板14的上侧部相连接。由于连杆组件在运行过程中,会承受漏沙板14和盖板等结构较大的负荷,为了能够减轻连杆组件的负载,在开启漏沙板14时,还能够启动卷线电机,卷线电机进行放线操作,由于连接线的一端与漏沙板14相连接,能够分担一部分的拉力。在将漏沙板14关闭时,可以使卷线电机进行收线操作,连接线收入到卷线盒10内,能够拉动漏沙板14向上转动,帮助连杆组件将漏沙板14关闭。
如附图6和附图7所示,漏沙板14的上方设置有托架12,所述托架12呈上宽下窄式结构,上侧宽能够方便垃圾更好地落入到托架12上,下侧窄能够使得垃圾精准地落入到操作仓9内部。托架12上设置有筛板13,为了简化制作工艺,筛板13可以设置成平面状结构,优选地,本实施例中,所述筛板13由上至下呈阶梯状结构,能够延长垃圾在筛板13上的滞留时间,从而有更充分的时间对垃圾中的沙子进行过滤。所述漏沙板14的上侧设置有第一电机16,第一电机16的输出轴连接有圆盘17,圆盘17的边缘处设置有偏心轴18,偏心轴18的末端与托架12的下侧部固定连接;所述漏沙板14的上侧还设置有安装座29,安装座29的侧部铰接有摇杆30,摇杆30的上端与托架12的上侧部铰接;所述漏沙板14的下部设置有漏沙口15。
在清洁机器人移动至目标位置后,通过连杆组件打开漏沙板14,筛板13也随之移出操作仓9。启动第一电机16,第一电机16带动圆盘17转动,从而带动偏心轴18进行圆周运动,并且,偏心轴18在转动过程中能够带动托架12的下侧进行前后上下移动。托架12移动的过程中,前侧的摇杆30会随着托架12往复摆动。清洁机器人将垃圾倒在筛板13上,筛板13随着托架12运动的过程中,能够将垃圾逐渐向下颠,使得垃圾在筛板上跳动,并逐渐向操作仓9内移动,移动过程中,垃圾中的沙子会通过筛板13落到漏沙板14上,然后滑落至漏沙口15并落到地面上,通过上述操作即可实现对垃圾中沙子进行过滤的功能。
所述操作仓9内设置有收集盒3,所述收集盒3的数量为两个,并且靠近筛板13一侧的收集盒3的容积大于远离筛板13的收集盒3的容积。在对沙子过滤的过程中,由于圆盘17和偏心轴18的转动使得筛板13上下颠簸,从而使得垃圾在筛板13上跳动,并沿着筛板13逐渐向操作仓9内移动,较轻的垃圾受到筛板13的颠簸能够落入到远端的收集盒3内,而较重的垃圾则会落入到近端的收集盒3内,由于干垃圾和湿垃圾在质量上具有较明显的差异,通过上述操作能够对垃圾进行预分类处理,便于后续对垃圾的处理。所述操作仓9的内部设置有移动架6,移动架6的底部设置有移动轮8,所述收集盒3设置在移动架6上;所述操作仓9的内壁设置有限位槽,移动架6的侧部设置有限位杆7,限位杆7的一端延伸至对应的限位槽内;所述箱体1的侧部设置有与操作仓9相连通的开口。所述移动架6上设置有压力传感器,压力传感器能感受压力信号,并能按照一定的规律将压力信号转换成可用的输出的电信号,通过上设置压力传感器能够监测收集盒3内所收集的垃圾的量。进一步地,在箱体1上可设置控制交互屏,并且控制交互屏与压力传感器相连接,用户可在控制交互屏上更加直观地了解到收集盒3内的垃圾的量。在需要对收集盒3内的垃圾进行处理时,只需拉动移动架6,将收集盒3从开口处移出即可。
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的权利要求书的保护范围之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种沙滩垃圾收集装置
- 一种便于收集垃圾的垃圾箱
- 一种用于沙滩清洁的智能机器人
- 一种用于沙滩清洁的智能机器人系统
- 一种双桶室内垃圾分类收集箱
- 一种沙滩垃圾收集机器人
- 沙滩清洁车的垃圾收集装置