跳过点火和跳过制动设备以及方法
文献发布时间:2023-06-19 13:26:15
相关申请的交叉引用
本申请要求于2019年4月8日提交的美国临时专利申请号62/830,763(TULAP079PUS)和于2019年6月12日提交的美国临时专利申请号62/860,591(TULAP079P2US)的优先权,这些美国临时专利申请通过援引并入本文。
技术领域
本发明涉及用于操作内燃发动机的方法和系统,该内燃发动机用于以跳过点火式方式为车辆提供动力。更具体地,当发动机接收到传递正转矩的请求时,可以基于车辆重量调整跳过点火顺序的点火密度。如果发动机接收到零转矩或负转矩的请求,则发动机可以在减速气缸切断模式或跳过气缸压缩制动模式下操作,其中一些工作循环作为压缩释放制动来操作。
背景技术
现今运行的大多数车辆(以及许多其他装置)是由内燃(IC)发动机提供动力的。内燃发动机典型地具有多个气缸或其他工作室,在这些气缸或其他工作室中发生燃烧。在正常行驶条件下,内燃发动机产生的转矩需要在宽泛的范围内变化,以便满足驾驶者的操作需要。多年来,已经提出并利用了用于控制内燃发动机转矩的多种方法。一些这样的途径考虑了改变发动机的有效排量。改变发动机有效排量的发动机控制途径可以被归类成两种类型的控制:多重固定排量式和跳过点火式。在多重固定排量式控制中,在低负载条件下停用固定的某组气缸;例如,在某些条件下,八缸发动机可以在相同的4个气缸上操作。相比之下,跳过点火式控制通过有时跳过任一给定气缸和有时对其点火来操作。总体上,跳过点火式发动机控制被认为提供了多个潜在优点,包括显著改进许多应用中的燃料经济性的潜能。尽管跳过点火式发动机控制的概念已经存在许多年,并且知晓其益处,但跳过点火式发动机控制直到最近才开始在商用发动机中使用。
众所周知,操作中的发动机往往是显著的噪声和振动来源,噪声和振动在本领域中经常被统称为NVH(噪声、振动和声振粗糙度)。总体上,与跳过点火式发动机控制相关联的成见是发动机的跳过点火式操作将使得发动机运转显著更粗暴,也就是相对于常规操作的发动机增大NVH。在比如汽车应用的许多应用中,跳过点火式发动机控制所呈现出的最显著的挑战之一是振动控制。事实上,不能令人满意地解决NVH顾虑被认为是阻碍广泛采用跳过点火式类型的发动机控制的一个主要障碍。
现有技术美国专利号10,077,726描述了一种能够停用气缸的发动机。发动机能够在多个发动机气缸模式区域中操作,在这些区域中仅选定的气缸点火模式可以被启用。发动机气缸模式区域的边界可以基于车辆质量或车辆重量来调整。该专利描述了基于基准重量与最大车辆总重之间的插值进行边界调整。虽然这种类型的调整在某些情况下可以提供可接受的性能,但是它不能识别车辆的质量或质量分布的变化可以如何影响车辆共振的位置和幅度,这些车辆共振影响发动机噪声和振动向发动机舱的传递。该专利也没有公开如何在发动机气缸模式区域内允许的点火模式中选择气缸点火模式。本申请描述了对现有技术的改进,这些改进提供了能够在各种应用中改进性能的额外的跳过点火式控制特征和增强。
压缩释放制动(CRB)是一种在工作循环的压缩冲程的上止点(TDC)处或在其附近打开气缸排气门的方法。压缩释放制动通常用于重型卡车,以提供发动机制动,从而减少卡车摩擦制动器的使用和磨损。在现有技术中,CRB通常由卡车操作者使用仪表板或控制杆来手动控制,这些仪表板或控制杆选择固定的气缸组在CRB下操作,而其他气缸则在燃料切断模式下操作,继续泵送空气通过发动机。例如,六缸发动机可以以例如2个、4个或6个气缸操作,这些气缸被选择以CRB操作。发动机制动的总体水平由操作者选择的变速器挡位以及CRB气缸数量的这种多级选择来控制。
虽然CRB的优势是众所周知的,但是在某些情况下,手动确定CRB操作的气缸的数量可能会很麻烦。如果CRB的使用能够更加自动化,从而可以在没有驾驶者干预的情况下自动确定合适的发动机制动水平,这将是期望的。还期望停用不在CRB模式下操作的气缸,以减少泵送通过发动机的空气。
发明内容
本发明涉及用于以跳过点火式方式操作内燃发动机的方法和布置。在一个方面,描述了一种平台,该平台由具有多个工作室的跳过点火式控制的发动机提供动力,该多个工作室提供能够移动该平台的原动力。传感器或模型输出指示该平台的重量的信号,该信号被发送到发动机控制器。发动机控制器确定跳过点火式特征曲线,该跳过点火式特征曲线包括操作点火分数和工作室负载。采用跳过点火式特征曲线的发动机操作提供所要求的发动机输出转矩,并且产生可接受水平的噪声、振动和声振粗糙度。发动机操作,使已点火的工作室具有与任何其他可能的跳过点火式特征曲线相比更接近最佳燃烧条件的燃烧条件。至少部分地基于指示平台重量的信号来调整跳过点火式特征曲线。
在另一方面,描述了一种操作跳过点火式控制的内燃发动机的方法,该内燃发动机具有多个工作室,该多个工作室提供能够移动平台的原动力。接收指示平台的重量的信号。确定操作点火分数和工作室负载,该操作点火分数和该工作室负载一起形成跳过点火式特征曲线。经确定的跳过点火式特征曲线产生可接受水平的噪声、振动和声振粗糙度,并且在已点火的工作室中导致与任何其他可能的跳过点火式特征曲线相比更接近最佳燃烧条件的燃烧条件。至少部分地基于指示平台重量的信号来调整跳过点火式特征曲线。
在又一方面,描述了一种调整动力传动系的动力传动系参数的方法,该动力传动系参数的值已经在校准过程中用基准车辆重量预先确定。该方法操作内燃发动机以使用跳过点火式特征曲线向该动力传动系提供所要求的转矩,该跳过点火式特征曲线与提供该所要求的转矩并且在可接受的噪声、振动和声振粗糙度水平下操作的所有其他跳过点火式特征曲线相比,在更接近最佳燃烧条件的燃烧条件下操作该内燃发动机的所有已点火的工作室。该方法基于当前车辆重量的确定来调整动力传动系参数。
在又一方面,描述了一种用于选择操作跳过点火式特征曲线的方法。确定期望的发动机输出。从所允许的点火分数列表中选择多个候选点火分数。计算针对这些候选点火分数中的每个候选点火分数的候选气缸负载,使得候选气缸负载与每个相关联的候选点火分数的组合基本上产生期望的发动机输出。每个这样的组合被称为候选跳过点火式特征曲线。选择这些候选跳过点火式点火特征曲线之一来作为操作跳过点火式特征曲线。内燃发动机是至少部分地基于选定的操作跳过点火式特征曲线来操作的。
在又一方面,描述了一种跳过点火式发动机控制器。该跳过点火式发动机控制器包括查询表格、跳过点火式特征曲线模块和点火控制器。该查询表格包含在计算机可读介质中并且包括表格条目,这些表格条目指示在不同发动机速度、变速器挡位、点火分数和车辆重量下的不同最大可允许气缸负载。跳过点火式特征曲线模块被布置成确定适合于提供所要求的发动机输出的操作点火分数。跳过点火式特征曲线模块利用查询表格来确定操作点火分数。点火控制器被布置成以提供操作点火分数的跳过点火式方式指导点火。
在又一方面,描述了一种操作内燃发动机的方法,该内燃发动机具有多个工作室、安装至车辆。发动机接收到零转矩或负转矩的请求。决定使内燃发动机旋转而不对任何工作循环进行点火是否合适。如果操作而不对任何工作循环进行点火是合适的,则根据转矩请求的大小,内燃发动机以减速气缸切断模式或跳过气缸制动模式操作。在跳过气缸制动模式下,选定的工作室的选定的工作循环以压缩释放制动模式操作。
在又一方面,描述了一种用于内燃发动机的发动机控制器,该内燃发动机具有多个工作室、安装至车辆。操作跳过点火式特征曲线模块被布置成确定使内燃发动机旋转而不对任何工作循环进行点火是否合适。如果确定操作而不对任何工作循环进行点火是合适的,则操作跳过点火式特征曲线模块根据转矩请求的大小指导内燃发动机以减速气缸切断模式或跳过气缸制动模式操作。在跳过气缸制动模式下,选定的工作室的选定的工作循环以压缩释放制动模式操作。
附图说明
参考结合附图进行的以下描述可以最佳地理解本发明及其优点,在附图中:
图1是展示了示例性乘用车辆的动力传动系的示意图。
图2是展示了装载有车辆乘员和货物的示例性乘用车辆的示意图。
图3是展示了示例性牵引车挂车组合的示意图。
图4是对于多个不同车辆重量的固定点火分数、气缸负载和变速器挡位,NVH与发动机速度的示例性关系曲线图。
图5是展示了根据本发明的特定实施例的发动机控制器的框图。
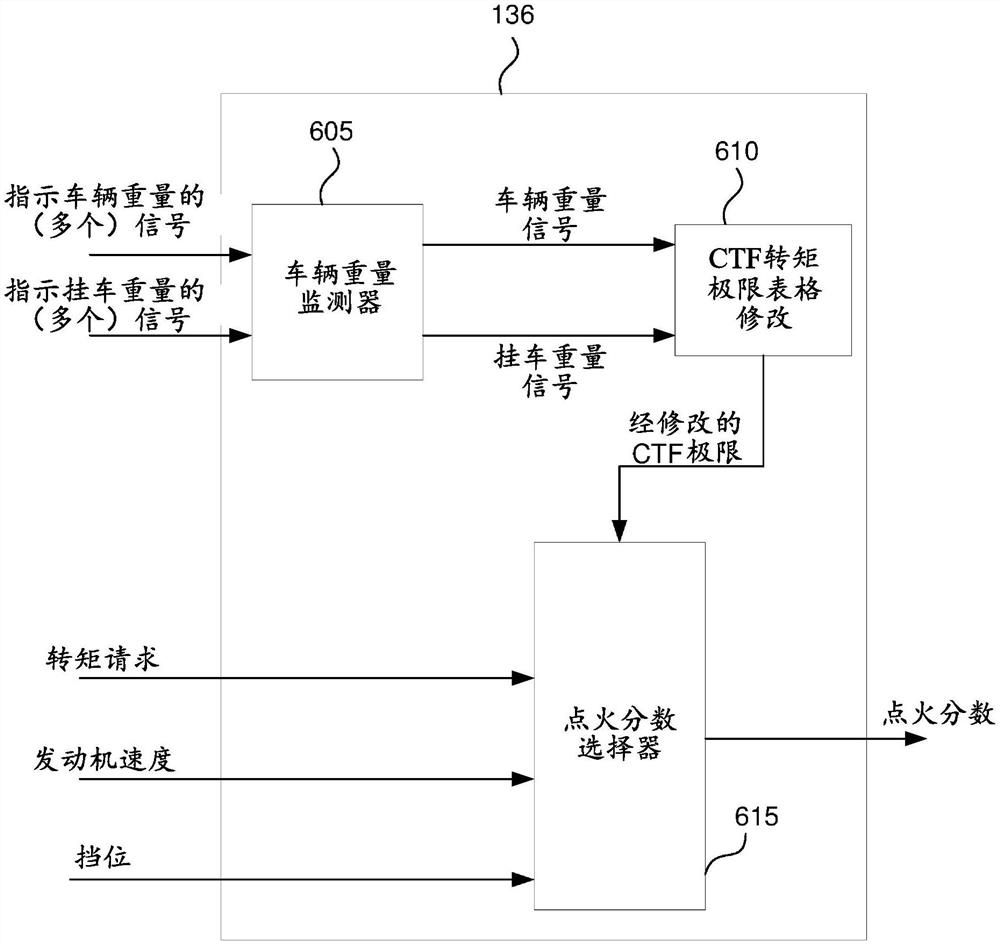
图6展示了基于车辆重量调整可用点火分数的操作跳过点火式特征曲线模块的实施例。
图7展示了根据本发明的特定实施例的在减速气缸切断模式或跳过气缸压缩制动模式下的操作的流程图。
在附图中,相同的附图标记有时用于指定相同的结构要素。还应了解,附图中的描绘是图解的而不是按比例的。
具体实施方式
本发明涉及一种用于以跳过点火式方式操作内燃发动机以向平台提供原动力的系统,该平台比如是车辆、牵引车挂车、机车、船只或飞行器。更具体地,本发明的各种实施方式考虑了平台重量,以帮助确定合适的跳过点火式点火频率、点火分数、点火模式或点火顺序。在一些实施例中,动力传动系滑差也可以基于车辆重量来调整。当平台被重载有乘员或货物时,使用本文描述的发明可以改进燃料经济性。对于压缩点火式发动机,使用本发明可以减少发动机排气中的NO
内燃发动机可以用作动力源以移动安装有内燃发动机的平台。图1示意性地展示了这样的系统。图1示出了未被占用的乘用车辆210的截面示意图。车辆210具有发动机212,该发动机根据需要提供使车辆210向前或向后行驶的原动力。来自发动机212的动力经由曲轴214传递到分离元件216。分离元件216可以是离合器、双离合器、变矩器、或允许发动机212与驱动轮222自由旋转的任何元件。因此,分离元件216的输入端和输出端可以以不同的速度旋转,并且在它们之间具有可变的滑差量。分离元件216的输出端连接至变速器218,该变速器在其输入轴与输出轴之间具有可调转速比。变速器218可以具有固定数量的齿轮,这样允许输入轴与输出轴之间有数个固定的转速比,或者该变速器可以是无级变速器,其中输入轴与输出轴之间的比率可以被连续地控制。变速器的输出轴可以连接至传动系220,该传动系允许动力从变速器218传递到驱动轮222。为了清楚起见,动力传动系中的多个不同元件(比如差速器)已经被省略。图1中示出的车辆210是具有纵向安装的发动机的后轮驱动式乘用轿车。本发明同样适用于前轮驱动式车辆、具有横向安装的发动机的车辆、以及四(或更多)轮驱动式车辆。本发明同样适用于具有承载式车身构造(车身板件与车架集成)的车辆和具有车身与车架分离式构造(车身板件安装至车架)的车辆。这些不同类型的车辆构造可以具有不同的NVH特性,但是本文描述的发明的使用不限于车辆的特定NVH特性。
本文描述的发明广泛适用于由内燃发动机提供动力的多种类型的机动化车辆,这些机动化车辆在道路或未改进地面上操作,这些机动化车辆比如是运动型多功能车辆、皮卡车、送货车、牵引车等。本发明也适用于在轨道上操作的机车、在水上操作的船舶、或者在空中飞行的飞行器。本发明适用于内燃发动机供应原动力以移动平台的任何情况,并且平台的特性(比如重量、重量分布、被牵引的负载等)在不同的操作时刻可以不同。
内燃发动机可以是四冲程内燃发动机,该内燃发动机的活塞在气缸内往复运动。工作循环由第一进气冲程、第二压缩冲程、第三膨胀冲程和第四排气冲程构成。然后在随后的工作循环中重复该冲程顺序。对于已点火的气缸,膨胀冲程通过燃烧由活塞、气缸和气缸盖限定的封闭容积内捕获的燃料产生动力。对于被跳过的气缸,在膨胀冲程期间不会发生燃烧。如果进气门或排气门在整个工作循环中保持关闭,则停用工作循环,使得没有空气被泵送通过发动机。如下文所描述的,被跳过的工作循环一般可以被停用,但是可能存在被跳过的工作循环泵送空气通过发动机的情况。对于四冲程发动机,发动机循环代表发动机的曲轴的两次完整转动。
在车辆应用中,由发动机产生的转矩被传递给一个或多个车辆车轮。在机动车辆的操作期间,车厢中的驾驶者或自主控制系统需要大范围的发动机转矩水平和发动机速度来适应变化的行驶条件。现今在运行的大多数车辆在基本相等的负载水平下操作所有发动机工作室或气缸,以适应这些可变转矩要求。即,发动机中每个气缸上的负载在任何给定时刻是大致恒定的,但是气缸负载上下变化以满足变化的转矩要求。
对于自然吸气式火花点火式发动机,工作室负载水平主要是通过使用对流动进入发动机的空气加以节流来调整的。火花点火式发动机一般以化学计量空气/燃料比操作,因此用节气门调整所引入的空气量也导致所喷射的燃料量的相应调整。用节气门操作是效率低的,因为工作室经常远离最大燃料效率条件操作,并且节流导致泵送损失。通过以跳过点火式方式操作发动机,可以显著地改进燃料效率,在跳过点火式方式中,一些工作室在最佳燃料效率条件下或接近最佳燃料效率条件操作,而其余的工作室被停用。
对于压缩点火式发动机,主要通过使用调整喷射到工作室中的燃料质量来调整工作室负载水平。压缩点火式发动机可以在宽空气/燃料比范围内以相对高的效率操作;然而,通过调整所喷射的燃料质量来调整工作水平负载使得排气温度控制变得困难。此外,过稀或过浓的空气/燃料比可能导致排气中高水平的有害燃烧产物,从而难以被后处理系统清除。通过以跳过点火式方式操作发动机,可以显著改进对空气/燃料比和排气温度的控制,在跳过点火式方式中,一些工作室在最佳燃烧条件下或接近最佳燃烧条件操作,而其余的工作室被停用。
一般来说,跳过点火式发动机控制设想到在选定的点火时机期间选择性地跳过某些气缸的点火。因此,例如,特定气缸可以在一个点火时机期间被点火并且然后可以在下一个点火时机期间被跳过,并且然后在下一个点火时机期间被选择性地跳过或点火。这与常规可变排量发动机操作形成对照,在常规可变排量发动机操作中,在某些低负载操作条件期间固定的一组气缸被停用。从发动机循环的角度看,跳过点火式控制可以使不同组的气缸在相继的发动机循环期间被点火,以产生相同的平均转矩,而常规可变排量操作将相同组的气缸点火。
跳过点火式发动机控制的一个挑战是将噪声、振动和声振粗糙度(NVH)减少到可接受的水平。一般地,可接受的NVH水平通过为车辆乘员提供合适的舒适水平来确定。在未被占用的车辆的情况下,可接受的NVH水平可以通过向环境中排放可接受的噪声水平或避免对动力传动系元件的机械损坏来设定。发动机所产生的噪声和振动能够通过多种多样的路径传递给车厢中的乘员。这些路径中的一些,例如动力传动系,可以修改对发动机噪声和振动特征中存在的多种不同频率分量的幅度。尤其是,较低的变速器传动比趋于放大振动,因为变速器正在增大转矩和车轮处的转矩变化。发动机噪声和振动还可以激励各种车辆共振,这些共振然后可以汇入车厢。向车辆增加乘客和货物增大了其车身结构的惯性。对于刚体运动,加速度与结构的惯性成反比。这意味着,在(有时由跳过点火式操作激励的)低频率下,在所有其他条件相同的情况下,对于相同的激励力,较重的车身将比较轻的车身振动更小。
一些噪声和振动频率能够是尤其令车辆乘员懊恼的。尤其是,低频率、重复模式(例如,在0.2Hz至8Hz范围内的频率分量)趋于产生被车辆乘员感知到的不期望的振动。这些模式的较高阶谐波能够导致乘客厢中的噪声。尤其是,典型地在25Hz与100Hz之间的频率可以在车厢内共振,所谓的“轰鸣”频率。商业上可行的跳过点火式发动机控制要求以可接受的NVH水平操作,同时提供期望的或要求的发动机转矩输出并且达成燃料效率提高或者其他增益。
车辆的NVH水平随车辆重量、发动机速度、点火分数、和变速器挡位而改变。例如,考虑选择特定点火分数的发动机控制器,该特定点火分数指明对于在特定发动机速度和挡位下提供期望的转矩所必需的点火百分数。基于点火分数,发动机控制器产生点火模式来以跳过点火式方式操作发动机的工作室。如熟悉本领域的人员所周知的,在给定发动机速度下,以一些点火模式平顺运转的发动机可能以其他点火模式产生不期望的声学或振动效果。类似地,一种给定点火模式可能在一个发动机速度下提供可接受的NVH,而同一模式在其他发动机速度下可能产生不可接受的NVH。如美国专利号10,247,121中所描述的,发动机引起的噪声和振动也受到气缸负载或工作室输出的影响,出于所有目的,该美国专利在此通过援引以其全部内容并入本文。如果输送到气缸的空气和/或燃料较少,则气缸的点火将产生较少的输出,以及较少的噪声和振动。因此,如果减少了气缸输出,则在高气缸负载下由于其不可接受的NVH水平而不可用的一些点火模式可能在低气缸负载下变得可用。类似地,如果车辆重量由于车辆乘员的数量增加或车辆携带货物负载而变化,则车辆的NVH特性将变化。同样,在外部附接至车辆的物品,比如车顶行李架中的物品或被牵引的挂车中的物品,可能影响车辆的NVH特性。这对于被牵引的挂车的重量可能超过牵引用牵引车的重量的牵引车挂车而言尤其如此。对于牵引挂车的车辆,车辆重量可以指牵引用牵引车和被牵引的挂车这两者的组合重量。显然,在某些情况下,牵引车在没有附接挂车的情况下操作。牵引车独自的NVH特性可以不同于拉动空挂车的牵引车的NVH特性。
图2展示了处于满载条件的图1中所示的乘用车辆210。车辆210可以具有多名车辆乘员232(示出5名),牵引了挂车236,可以在车顶行李架中具有货物234,并且可以在后备箱中具有货物230。车辆210中的或附接到该车辆的这些附加元件可以影响车辆的NVH特性,并且改变可允许的动力传动系参数集,比如点火分数或密度以及变矩器滑差。例如,空的乘用车辆的整备重量可以约为3,000磅。如果车辆满载乘员和货物,则车辆重量可能增加到例如4,500磅。车辆重量的这种示例性增加50%可能影响发动机产生的NVH如何传递给车辆乘员。
对于比如皮卡车、运输卡车、或牵引车挂车组合等车辆,车辆重量的变化可能更加急剧。图3描绘了示例性牵引车挂车组合。发动机和动力传动系元件都可以位于牵引车单元310中,驾驶者316可以坐在该牵引车单元处。牵引车单元310可以具有整流罩318以减少空气动力学阻力。挂车312的负载重量可以是牵引车单元310的三倍或更多倍。挂车312通常通过牵引座联接器314连接到牵引车单元310。在这种类型的联接器中,牵引车单元310具有面向上的平面表面,该平面表面具有中心开口,挂车312的面向下的牵引销插入该开口中。挂车312具有匹配的面向下的平面表面,该平面表面搁置在牵引车单元的面向上的平面表面上。这些平面表面可以相对于彼此旋转,使得挂车312可以容易地跟随在牵引车单元310后面转弯。牵引车单元310与挂车312之间的平面接触表面允许挂车重量的很大一部分由牵引车单元310的后车轮320和322承受。挂车312的其余重量由挂车后车轮324和326承受。
图4中以图表方式描绘了改变车辆重量的影响,该图示出了对于固定的变速器传动比和气缸负载,针对选定的点火分数和多个不同车辆重量,NVH与发动机速度的示例性关系曲线图。图4示出了对应于车辆重量的不同值的一组三条曲线151、152和153。曲线151对应于最小车辆重量,而曲线152和153对应于相继更高的车辆重量。如图4中所示,较高的车辆重量产生较低的NVH,但是对于任何固定的点火分数、气缸负载和变速器传动比,NVH曲线的总体形状基本相似。总体上,低发动机速度下NVH较高,这是因为低发动机速度趋于产生0.2Hz至8Hz频率范围内的振动,这对于车辆乘员而言尤其不悦。除了在低发动机速度下的高NVH之外,可能在较高的发动机速度下出现NVH特征中的一个或多个共振151a、152a、153a。这些峰可能对应于激励车厢轰鸣频率或车辆内的其他共振。如图4中所描绘的,随着车辆质量增加,与每条曲线151a、152a和153a相关联的共振峰的位置可能倾向于转移到较低的发动机速度;然而,取决于共振的性质,共振频率151a、152a和153a在一些情况下可以以基本相同的频率出现。
图4中还示出了可接受的NVH极限160。该极限被示出为针对所有发动机速度和行驶条件具有单个恒定值;然而,如下所述,情况不必如此。在该示例中,低于NVH极限160的操作区域代表了从NVH角度来看可接受的操作点的区域,而高于NVH极限160的区域是所排除的操作点。图4的观查表明,对于最轻的车辆重量(对应于曲线151),在高于大约1000rpm的发动机速度下的操作导致可接受的NVH特性,共振151a周围的速度带除外,在该速度带中在大约1950rpm到2350rpm范围内的发动机速度导致不可接受的NVH、并且因此是所排除的操作点。对于中间车辆重量曲线152,允许在高于大约800rpm以上(在大约2050rpm至2200rpm之间的速度带除外)的发动机速度下操作。对于所示的最重车辆重量(曲线153),允许在高于大约550rpm的所有发动机速度下操作。尽管曲线153显示出共振153a,共振频率下的最大NVH仍然低于可允许极限160。一般地,对于每个点火分数、气缸负载和变速器传动比,可以获得类似于图4中所示的结果。这些曲线可以显示在不同发动机速度下具有不同NVH值的多个共振,但是所有点火分数、气缸负载和变速器传动比将显示出在定性方面相似的曲线。注意,在被常规控制的发动机中、即在没有跳过点火(其中所有气缸在基本相同的负载下操作)的情况下,获得的曲线族对应于点火分数等于一的情况。
本申请描述了将车辆重量或负载考虑在内的各种发动机控制器实现方式,以提供具有可接受的NVH特性的燃料高效、排放低的操作。总体上,发动机控制器被布置成根据车辆重量来避免或选择特定的点火频率、点火分数、点火模式或点火顺序。还可以考虑重量分布,比如牵引车中的重量相对于挂车中的重量、或者位于车辆的后备箱中的货物相对于乘坐在车厢中的乘员。在一些实施例中,也可以基于车辆重量、或被牵引的挂车的存在或不存在,调整动力传动系分离元件(比如变矩器)的滑差。
对于跳过点火式控制的发动机,在每个发动机速度和负载条件下存在具有最佳燃烧特性、但不一定具有可接受的NVH特性的点火分数或点火密度。对于火花点火式发动机,最佳燃烧特性可以对应于提供最佳燃料效率的燃烧特性。对于压缩点火式发动机,最佳燃烧特性可以对应于使排气流中有害成分的产生最小化并且为后处理系统提供合适的排气温度的空气/燃料比。在某些发动机速度和气缸负载下,存在一些对燃烧特性而言最佳的点火分数,这些点火分数在空载或轻载的车辆中表现出不可接受的NVH。如果在负载更重的车辆中操作,这些点火分数可以导致可接受的NVH水平。燃料经济性和/或车辆排放的改进可以通过使用这些以前排除的点火分数来实现。
任何特定车辆所允许的发动机产生的NVH可能根据制造商的规范而有所不同。一般地,车辆在平滑的测试轨道上进行校准,其中基准车辆重量指示轻载的车辆。跳过点火式操作中的可接受点火分数的当前校准技术没有考虑车辆重量或惯性负载变化。结果是,跳过点火式操作受到为轻载的车辆设置的约束的限制。这些测试条件通常与现实世界的行驶条件相差甚远。对于跳过点火式控制的发动机,该校准程序可能不必要地限制可允许的操作点火分数,并因此降低来自跳过点火式操作的潜在增益。
车辆的振动响应尤其取决于车辆的质量。鉴于相同的激励,更大质量的车身将在低频范围内经历更小的振动加速度(车辆刚体运动),如图4中以图表方式描绘的。这与车辆是空载或轻载时相比允许发动机在更高负载下以更高的点火分数操作、而没有不可接受的振动水平。由于这种效应导致的潜在校准差异在重型/货运卡车应用(其中在装载条件与空载条件之间的重量差异可能很大)中可能特别大。
参考图5,将描述根据本发明的特定实施例的发动机100。发动机100由发动机控制器130和发动机112的工作室113构成。图5中描绘的发动机112具有布置成两排的八个工作室113。此数量的工作室和工作室布置仅仅是示例性的,并且具有任何布置(即直列式、V型、对置式)的任何数量的工作室的发动机可以与本发明一起使用。发动机控制器130接收代表期望的发动机输出的输入信号114。输入信号114可以被视作针对期望的发动机输出或转矩的请求。信号114可以从加速踏板位置传感器(APP)或比如巡航控制器、转矩计算器、自主车辆控制器等其他合适的来源接收或获得。可选的预处理器可以在将加速踏板信号递送到发动机控制器130之前对其进行修改。然而,应了解,在其他实施方式中,加速踏板位置传感器可以与发动机控制器130直接通信。发动机控制器130可以包括基础点火频率计算器102、操作跳过点火式特征曲线模块136、动力传动系参数调整模块108、点火正时确定模块106、以及点火控制单元110。发动机控制器130被布置成以跳过点火式方式操作发动机工作室112。在一些实施例中,发动机控制器可以接收来自被驾驶者或一些自动化制动系统压下制动踏板的负转矩信号。
基础点火频率计算器102接收输入信号114(以及当存在时其他合适的输入)和发动机速度132,并且被布置成确定将适合于输送期望的输出的基础点火频率或点火分数111。基础点火频率111是在对应于最佳或接近最佳燃烧条件的气缸负载下输送所要求的转矩的点火频率。
基础点火频率111可以输入到操作跳过点火式特征曲线模块136中。操作跳过点火式特征曲线至少部分地基于发动机速度132、变速器挡位134、车辆重量138、变矩器滑差140(如果有的话)和其他因素142(这些全部是操作跳过点火式特征曲线模块136的输入)而确定。其他因素142可以包括但不限于道路条件、驾驶者设置、加速踏板位置、背景车厢噪声和振动、环境温度以及加速踏板位置的变化速率。如美国专利#9,739,212中所描述的(出于所有目的,该美国专利在此通过援引以其全部内容并入本文),这些因素中的一些可能影响被视为是可接受的NVH水平。例如,道路噪声、娱乐系统的使用、或其他背景噪声和振动可能掩盖发动机产生的NVH,从而提高了发动机产生的NVH的可接受水平。
用作操作跳过点火式特征曲线模块136的输入的车辆重量138可以是以磅、千克或一些其他单位指示车辆重量的数值。可替代地,车辆重量可以被转换成表示装载水平的较小范围的数字,或者可以表示为最大负载的百分比。在示例性的简单实施例中,车辆重量信号138可以是由三种不同状态(1,2,3)表示的变量,这三种不同状态对应于由重量值范围定义的轻装载、中等装载和重装载。
输入信号114也可以用作操作跳过点火式特征曲线模块136的输入。操作跳过点火式特征曲线模块136确定操作跳过点火式特征曲线。操作跳过点火式特征曲线包括操作点火分数(FF
操作跳过点火式特征曲线模块136在确定适合的点火分数时考虑了多个可能的工作室输出水平。存在着操作跳过点火式特征曲线模块136能够将不同的可能的工作室输出水平考虑在内的各种各样的方式。在一些实施例中,例如,操作跳过点火式特征曲线模块136参考一个或多个查询表格。查询表格可以包含条目,这些条目指示针对特定点火分数或频率、气缸负载、传动比和车辆重量的可允许的发动机速度、气缸负载和/或其他发动机参数。针对离散的车辆装载水平,可以存在离散的表格集(例如,针对重量每增加100磅的不同的查询表格集)。对应于轻载的车辆、中载的车辆或重载的车辆,可以存在三个离散的表格集。
使用查询表格来评估一个或多个可能的跳过点火式特征曲线。每个跳过点火式特征曲线经由点火频率和气缸负载的某种组合产生期望的发动机转矩。这些跳过点火式特征曲线中的一些将在某些发动机速度范围、挡位设置和车辆重量上产生不可接受的NVH,并且将被排除而不作为操作跳过点火式特征曲线来考虑。在其余的跳过点火式特征曲线中,操作跳过点火式模块136可以有利地选择燃烧条件尽可能接近最佳燃烧条件的跳过点火式特征曲线作为操作跳过点火式特征曲线。可替代地,操作跳过点火式模块136可以使用替代标准来确定操作跳过点火式特征曲线。
在图5中所示的图示实施例中,提供了动力传动系参数调整模块108,该动力传动系参数调整模块与操作跳过点火式特征曲线模块136协作。动力传动系参数调整模块108指导发动机112以选定的动力传动系参数操作,以确保实际发动机输出基本上等于在操作点火分数下所要求的发动机输出。例如,如果操作跳过点火式特征曲线模块136确定可以使用较高的点火分数、但将需要使用较低的工作室输出水平或燃料充量,则动力传动系参数调整模块108将确定合适的、较低量的燃料被输送到已点火的工作室。动力传动系参数调整模块108可以负责设定任何合适的发动机设置(例如,充气质量、火花正时(在火花点火式发动机中)、凸轮正时、气门升程和正时、排气再循环流量、增压条件(在涡轮增压发动机或增压发动机中)、节气门位置等)以帮助确保实际发动机输出与所要求的发动机输出相匹配。动力传动系参数调整模块108也可以控制动力传动系滑差量。
点火正时确定模块106从操作跳过点火式特征曲线模块136接收操作点火分数117并且被布置成发出一系列的点火指令,这些点火指令导致发动机提供操作点火分数117所指明的点火百分数。点火正时确定模块106输出的这一系列的点火指令(有时称为驱动脉冲信号116)被递送给点火控制单元110,该点火控制单元通过引导至这些发动机工作室112的点火信号119来指挥实际点火。
本发明的各种实施例的优点在于,它们在确定可接受的点火分数时考虑了车辆重量。即,它们不必假设车辆处于轻载的条件下。在某些情况下,轻载的车辆不可接受的点火分数或点火频率对于重载的车辆而言可能是可接受的。例如,参考图4中描绘的点火分数,从NVH的角度来看,以2100rpm操作轻载的车辆(由曲线151表示)将是不可接受的,而以该速度操作重载的车辆(曲线153)则是可接受的。利用本发明允许获得更多的点火分数,这总体上使得能够在更接近基础点火频率的点火分数下操作,这样导致燃烧条件更接近最佳。
应当理解,发动机控制器130可以在包括一个或多个查询表格的多种方法中确定操作点火分数117。当然,可以修改查询表格中数据的格式和结构、条目的数量、查询表格的输入、查询表格的数量、以及查询表格中的值,以适应不同应用的需要。总体上,来自上述表格的数据能够被存储在或涉及任何适合的机制、数据结构、软件、硬件、算法或者指明或代表了针对特定类型的与点火相关的操作、特征或点火分数的使用约束条件的查询表格。例如,一些查询表格结构可以基于一组输入变量来确定点火分数。可替代地,一些查询表格结构可以基于不同的一组输入变量来确定最大气缸负载。可以使用其他类型的查询表格数据结构。
特别地,在一些实施例中,可以确定操作跳过点火式特征曲线而无需首先确定基础点火频率。在这种情况下,可以由操作跳过点火式特征曲线模块136考虑提供所要求的转矩的多个候选跳过点火式特征曲线。操作跳过点火式特征曲线模块136然后可以基于多个标准从这些候选跳过点火式特征曲线中进行选择;这些标准包括但不限于NVH和燃烧特性。
在本发明的附加实施例中,可以使用多个可接受的NVH水平。这样有效地改变了图4中可接受的NVH标准线160的高度。更严格的NVH标准将导致线160的位置更低,而较不严格的NVH标准将导致线160的位置更高。
任何和所有描述的操作可以被布置成非常快速地刷新它们的确定/计算。在一些优选实施例中,在逐个点火时机的基础上刷新这些确定/计算,尽管并不要求这样。在逐个点火时机的基础上做出点火决策的跳过点火式控制可以称为动态跳过点火式(DSF)控制。在一些实施例中,例如,操作跳过点火式特征曲线的选择是在逐个点火时机的基础上执行的。逐个点火时机地控制多个不同部件的优点是使得发动机对改变的输入和/或条件非常具有响应性。尽管逐个点火时机的操作是非常有效的,但是应当理解,各个过程可以更慢地刷新,同时仍然提供良好的控制(例如,可以曲轴每一转、每两个或更多个点火时机等地执行点火分数确定)。
本文描述的任何操作可以以可执行计算机代码的形式存储在合适的计算机可读介质中。这些操作是在处理器执行计算机代码时实行的。这些操作包括但不限于由点火分数计算器102、点火正时确定模块106、点火控制单元110、动力传动系参数调整模块108、操作跳过点火式特征曲线模块136、发动机控制器130,或本申请中描述的任何其他模块、部件或控制器执行的任何和所有的操作。
图6展示了本发明的替代性实施例,其中描述了基于车辆重量或等效的车辆质量或车辆负载来修改操作点火分数的设备。在该实施例中,CTF极限(或其他转矩极限)乘以因子,该因子是感测到的车辆重量和基础空载重量的函数。一般地,较重的车辆将允许更宽松的DSF操作。在一个实施例中,车辆重量监测器605基于一个或多个输入信号检测车辆重量。车辆的重量可以通过比如座椅重量传感器(针对安全气囊和安全带警告/操作而存在)和主动悬架位移传感器等传感器来感测。可替代地,每个车桥上可以存在重量传感器或监测器,或者每个车轮上可以存在轮胎压力传感器,这些轮胎压力传感器可以用于推断车辆重量。
可以使用其他类型的传感器或传感器组合来推断车辆的重量。在一种方法中,车辆的重量/装载可以通过测量车辆动力传动系中的旋转部件的扭转速度波动而得到。通常测量的旋转部件的示例包括但不限于发动机曲轴、变速器输入/输出/中间轴、传动轴、半轴或(多个)从动轮。可以直接或间接地感测其他旋转部件的速度。车辆的惯性的增加典型地会导致上述旋转部件中的一个或多个的速度波动幅度减小。这种关系可以被存储在表格中、或者使用在发动机控制器中运行的实时模型重新创建。
在基于表格的实施例中,表格包含用于一个标准车辆重量的预期扭转波动值。实际操作重量通过将实际测量的扭转波动与表格标准值进行比较来估计。与表格相比,实际测量值越低将表明车辆质量越高,反之亦然。对于给定的点火分数、平均发动机速度、变速器挡位和发动机转矩,存储了预期的扭转波动。这将是四维(4D)表格或一系列三维(3D)表格。如果扭转波动随发动机转矩线性地变化,则表格可以简化为单个3D表格或一系列二维(2D)表格。
在另一基于查询表格的实施例中,存储了对应于多个车辆重量的多个表格。这些表格将是多个4D表格,以点火分数、平均发动机转速、发动机转矩和变速器挡位为变量(或者如果发动机转矩可以作为变量移除的话则是多个3D表格)。然后,可以将实时测量的扭转波动与这些表格进行比较,并且通过根据针对不同车辆重量的表格值进行内插/外推来估计车辆重量。
在另一实施例中,预期的扭转波动通过模型(物理的、机器学习的、或一些其他类型的模型)来计算。然后可以将模型结果与实时测量的扭转波动进行比较,以便估计操作车辆重量。
旋转部件的扭转波动可以根据旋转速度的高速度测量来计算。通过对速度信号进行高通滤波,可以将波动与均值或平均速度分开。可以通过计算移动窗口内速度波动的RMS(均方根)值来进一步处理经高通滤波的信号。该信号提供了对扭转速度波动水平的度量。可以存在不同的方法来处理测得的旋转速度以获得扭转波动度量。计算操作期间实时波动的相同方法可以用于填充预期值的校准表格或用于实时模型中。
另一种用于估计车辆重量或质量的方法是通过测量多个不同发动机参数和车辆参数以及车辆速度或加速度。与先前描述的方法不同,该方法使用平均或缓慢移动的车辆速度或加速度值,而不是这些值的快速波动。一般地,通过操作发动机产生的动力(P
P
在等式1中,a、b和c是常数,这些常数可以通过实验确定、或者可以基于车辆的设计、或者可以在车辆操作期间进行估计。v为车速(速度),I为有效转动惯量,α为发动机的角加速度,m为车辆质量,a为车辆的线性加速度,grade为车辆所在的表面的坡度,并且gravity为车辆的重力加速度。除了车辆质量之外,所有这些量一般都是已知的,车辆质量可能如前所述根据车辆负载而变化很大。
等式1可以重新排列以求解车辆质量,并且针对车辆的质量,发动机动力(T*ω)可以代替车辆动力以产生等式2。
m=(T*ω/v)-(a+b*v+c*v
等式2右边的所有这些量一般是已知的,所以可以针对车辆质量求解等式2。如先前所指出的,车辆质量可能根据车辆负载而变化很大。实际上,等式2中的参数可以在多种行驶条件下测量多次,并且等式2求解多次。这些不同测量值和计算值的平均值可以用作车辆重量的估计值。等式和估计值可以针对由变速器、差速器或车轮轴承等摩擦引起的损失而进行调整。车辆可以是单个单元、或者可以是由机械链接的多个单元组成的平台,比如牵引车挂车。用于测量或估计车辆重量的任何所述系统和方法可以单独地使用或组合地使用。
在某些情况下,附加输入可以是指示挂车重量的(多个)信号。这些挂车信号可以基于用于推断车辆重量的相同类型的传感器。
来自多个不同重量传感器、或用于估计重量的其他传感器和计算值的输入可以在车辆重量监测器605中被处理和计算,以与车辆的已知的空车整备重量相比接近车辆的重量。然后,两个重量之间的差或两个重量的比率可以用作至CTF转矩极限表格修改器610的输入,以适配新的车辆惯性的点火决策。
在一个实施例中,车辆重量监测器605产生指示车辆重量和被牵引的挂车(如果存在的话)的重量的信号。这些信号可以基于水平(例如,2个、3个或更多个车辆和挂车重量水平),或者可以是指示车辆的/挂车的重量的连续可变信号。CTF转矩极限表格修改模块610可以利用车辆重量监测器605的输出以基于车辆和挂车重量确定经修改的CTF/转矩极限。挂车重量信号为零意味着没有附接挂车。点火分数选择器615使用经修改的CTF/转矩极限,以选择针对当前发动机操作参数(比如转矩请求、发动机速度和挡位设置)的操作点火分数。一般地,由于车辆重量增加,可允许的气缸负载将增大,因为增加的车辆质量减小了到达车厢的发动机振动量。这样允许随着车辆的重量的增加,更多的点火分数具有可接受的NVH特性。
在一个实施例中,车辆重量监测器605、CTF/转矩极限修改模块610和点火分数选择器615被实现为操作跳过点火式特征曲线模块136(参见图5)内的硬件、固件或软件。然而,更一般地,这些部件中的一个或多个可以驻留在发动机控制器130的其他部分中。
在一个实施例中,CTF/转矩极限根据基础校准进行修改。考虑到针对给定的操作参数集(比如转矩请求、发动机速度和挡位)的车辆和挂车重量水平,经修改的CTF极限于是用于选择针对最佳燃烧和可接受的NVH的最佳点火分数。
可替代地,可以针对各个车辆和挂车重量水平提供离散的数个预加载的CTF/转矩限制表格集,并且将其用于调整CTF极限。例如,如果车辆重量监测器具有三个车辆重量输出水平(例如,轻、中、重),则可以为每个水平的车辆重量提供预加载的CTF极限。
上述校准可以经由(针对不同重量范围的)查询表格被加载到DSF发动机控制器中,作为基于实时模型的计算,或者作为根据车辆重量的基准转矩极限表格上的简单乘数。
对于具有不同水平的输入,在转矩极限方面存在不同次数的校准。这可以作为单独表格进行预加载、或者使用对应于每个装载水平的乘数进行计算,从而实时调整现有的表格值。对于包含连续数值的输入,计算可以是基于经感测的重量的乘数或函数对基准表格的调整。
只有当车辆停止时、在可能发生乘客和货物的装载或卸载的情况下,才可以更新对气缸转矩极限或点火分数的上述调整。移动车辆上的重量变化可能很小或很慢,以至于不需要持续更新基于重量的调整。在行驶循环期间仅进行一次基于重量的调整减少了发动机控制器或其他确定基于重量的调整的装置上的计算负载。在针对与基准重量相比更高或更低重量进行校准时的调整可以通过测量或通过计算得到。
在替代性实施例中,比如变矩器等分离元件中的滑差可能基于车辆重量而变化。许多车辆故意在变矩器中使用经校准的滑差水平,以提供可接受的NVH水平。如先前所描述的,重载的车辆一般在给定的发动机操作条件下比轻载的车辆经历更少的NVH。结果是,如果发动机控制器(比如发动机控制器130)接收到指示车辆重量已经从其空车整备重量增加的输入,则变矩器中允许的滑差量可以减小。这样导致燃料效率的改进,因为更多的发动机旋转被传递到车轮。应当理解,发动机控制可以响应于车辆质量的变化而调整操作点火分数和变矩器滑差两者,或者可以单独地调整其中任一者。调整可以基于对哪个动力传动系操作参数(点火分数或滑差)提供最大燃料效率改进的调整。在一些情况下,比如具有带离合器的手动变速器的车辆,分离元件滑差不能被调整,并且响应于所感测到的车辆重量的增加,仅可以调整点火分数。
在一些行驶情况下,发动机控制器130可以接收内燃发动机提供零转矩或负转矩的请求,比如当减速或下坡时。在这种情况下,发动机可以根据负转矩请求的大小在减速气缸切断(DCCO)模式或跳过气缸压缩制动模式下操作。在减速气缸切断模式下,所有的发动机气缸被停用。这样导致很少或没有泵送空气通过发动机,并且负转矩主要来自发动机摩擦。这样导致相对低的发动机制动水平。在转让给申请人的美国专利号9,790,867和10,167,799中已经披露了在减速气缸切断模式下操作发动机。DCCO操作的优点是没有空气被泵送通过发动机,这避免了相对冷的空气流过排气系统中可能存在的后处理元件,从而降低后处理元件的温度。如果在后处理元件内没有维持足够升高的温度,其温度可能下降,使得不再有效地将有害的发动机排放物转化为更良性的尾管排放物。在轻载的车辆中,DCCO可能比在重载的车辆中使用得更频繁,因为需要较小的负发动机转矩来将车辆维持在其期望的速度轨迹上。因此,是使用DCCO还是使用跳过气缸压缩制动的决定可以至少部分地基于车辆重量。
在跳过气缸压缩制动模式下,选定的工作室的选定的工作循环以压缩释放制动模式操作。其他工作室可以操作,使得它们不被点火。未点火的工作循环可以停用或操作以泵送空气通过发动机。换句话说,选定的工作室的选定的工作循环可以停用,使得它们的排气门在选定的工作循环期间保持关闭。选定的工作室的其他选定的工作循环可以在排气冲程期间基本上以与气缸点火相同的方式打开它们的排气门,但是没有燃料喷射或燃烧。这些工作循环可以称为泵送工作循环。转让给申请人的美国专利#9,328,672中描述了这种操作模式。可替代地,对于配备有压缩释放或Jake
跳过气缸压缩制动可以与车轮上安装的摩擦制动器相结合,以在下坡移动时使车辆减速或控制车辆速度。经常希望尽可能多地使用跳过气缸压缩制动,以最小化磨损摩擦制动器并延长其使用寿命。期望的制动量可以根据制动踏板位置推断,并且由此[和其他输入,比如发动机速度、车辆重量、道路坡度和其他变量]可以计算期望的发动机制动力。这进而可以用于得到“跳过分数”,该跳过分数可以被输入到确定跳过模式的算法。该算法可以使用西格玛德尔塔(Σ-Δ)转换器,比如一阶西格玛德尔塔转换器,或者使用查询表格以确定提供期望制动量的跳过模式。跳过模式可以包括作为压缩释放制动器操作的气缸(在上止点附近打开排气门)、作为气泵操作的气缸(在下止点附近打开排气门)、或停用的气缸(排气门在整个工作循环中保持关闭)。某个算法确定平均起来以压缩释放方式操作的气缸的数量,即压缩释放制动工作循环的密度。随着负转矩请求的大小增加,压缩释放制动工作循环的密度增加,从而增加发动机制动的大小。该算法可以使用排气系统的声学响应特性来防止在可能导致令人讨厌的NVH的频率或频率范围下的声学激励。驾驶者还可以反复轻踏制动器,产生用于增加压缩释放制动工作循环的密度的信号。
图7中所示的流程图700描绘了针对零转矩请求或负发动机转矩请求的发动机控制逻辑。流程图700开始于步骤708,在该步骤处开始流程图700的操作。在步骤710处,确定是否需要正发动机转矩来操作车辆。如果需要正转矩,则控制移动到步骤716,该步骤使发动机通过在发动机中燃烧燃料来操作以产生正转矩。如果需要零转矩或负转矩,则控制移动到步骤712,在该步骤处确定操作内燃发动机而不对任何工作循环进行点火是否合适。此类操作模式包括DCCO和跳过气缸压缩制动。以下描述这些操作模式可能不适合零转矩请求或负转矩要求的情况。如果DCCO或跳过气缸压缩制动是不合适的,则控制移动到步骤720,在该步骤处发动机的至少一些气缸被点火。应当理解,即使一些气缸点火,如果加燃料水平低,发动机也会产生负转矩。如果条件适合于DCCO或跳过气缸压缩制动,则控制移动到步骤714。在步骤714处,确定是DCCO还是跳过气缸压缩制动合适。如果没有压下制动踏板,则DCCO操作将可能是合适的。如果压下制动踏板超过阈值水平,则跳过气缸压缩制动将可能是合适的。如其他地方所述,以上其他变量可以确定DCCO与跳过气缸压缩制动之间的阈值水平。如果DCCO操作是合适的,则控制移动到步骤722,在该步骤处发动机以DCCO模式操作。如步骤724中所指出的,当以DCCO模式操作时,发动机可以可选地与传动系断开联接。如果跳过气缸压缩制动是合适的,则控制移动到步骤718,在该步骤处发动机以跳过气缸制动模式操作。如步骤726中所指出的,当以跳过气缸压缩制动模式操作时,发动机可以可选地完全或部分地与传动系断开联接。
图7中所展示的控制顺序可以在逐个点火时机的基础上执行,不过执行的频率可以更慢,比如每两个点火时机或每个发动机循环。通常,是使用DCCO还是使用跳过气缸压缩制动的决定将基于驾驶者或自主控制器是请求零转矩还是负转矩。驾驶者将典型地通过将他/她的脚从用于控制车辆运动的加速踏板和制动踏板两者移开而做出零转矩请求。根据情况,这可以导致发动机以DCCO模式运行,在这种情况下发动机将由于摩擦损失而缓慢减速,或者导致发动机燃烧足够量的燃料以克服摩擦损失并维持其旋转速度,即发动机处于怠速。在配备有停止/启动功能的车辆中,零转矩请求可能导致发动机在行驶循环期间停止。驾驶者压下制动踏板通常将作出负转矩请求。这将导致应用摩擦制动器和发动机制动的某种结合。驾驶者压下加速踏板通常将作出正转矩请求。这将导致启用至少一些发动机气缸,使得它们燃烧燃料并且产生正转矩。
如上文所指出的,可能存在许多可能不期望进入DCCO模式的无发动机转矩操作条件。例如,在大多数非混合燃料发动机中,期望在车辆被操作时以某一最小速度(例如,以怠速速度)保持曲轴旋转。因此,发动机操作规程可以指定将仅在曲轴以高于标定DCCO进入发动机速度阈值的速度旋转时进入DCCO模式,从而防止在发动机以怠速或接近怠速发动机速度操作时进入DCCO模式。类似地,在许多应用中,可能不可能使曲轴完全与传动系断开联接。因此,发动机操作规则可以规定,当车辆停止或缓慢移动(例如,以低于DCCO进入阈值车辆速度的速度行进)时,不可以进入DCCO模式,这可以根据挡位或其他操作条件而变化。对于涡轮增压发动机,如果涡轮增压器旋转速率下降低于阈值,则可能禁止DCCO操作。在另一个示例中,当进行某些诊断测试时,DCCO可能是不合适的。在某些类型的牵引控制事件等期间,DCCO操作也可能是不期望的(或特别期望的)。应当理解,这些仅仅是几个示例,并且存在DCCO可以被认为是适当的或不适当的多种多样的情况。限定DCCO操作何时是适当的或不适当的实际规程可以在实施方式之间大不相同,并且完全在发动机控制设计者的判断能力范围内。
以类似的方式,可能存在某些需要车辆制动时但以跳过气缸压缩制动模式操作不合适的情况。例如,跳过气缸压缩制动在某些情况下可能产生不可接受的NVH。车辆位置可以使用车载全球定位系统(GPS)自动地确定,因此发动机控制器可以自动知晓是否允许压缩释放制动。对于涡轮增压发动机,可能存在对被停用的工作循环的密度的限制,以维持最小的涡轮增压器旋转速率。可以使用压缩释放制动工作循环和泵送工作循环的混合来维持通过发动机的气流,以维持涡轮增压器的旋转。因此,压缩释放制动工作循环、停用的工作循环、以及泵送工作循环的模式可以至少部分地基于将涡轮增压器旋转速率维持高于阈值。
当进入DCCO或跳过气缸压缩制动模式时,存在数种可以控制气缸的方式。在一些情况下,在做出进入DCCO模式的决定后(即,立即有效),气缸中的每一个在下一个可控工作循环中被停用。在其他情况下,可能期望使用跳过点火方法更逐渐地将点火分数斜坡下降到DCCO,在跳过点火方法中一些工作循环被点火并且其他工作循环被跳过。当发动机从跳过点火模式过渡到DCCO模式时,跳过点火斜坡下降方法良好地起作用。然而,应当理解,跳过点火斜坡下降方法也可以用于促进从发动机的所有气缸操作过渡到DCCO,或者从正使用减小的排量(例如,当使用8个气缸中的4个气缸操作等时)的可变排量模式过渡到DCCO。
以类似的方式,当过渡到跳过气缸压缩制动模式时,过渡可以逐渐完成。例如,随着发动机从产生正转矩过渡到负转矩,在一些气缸从停用切换到压缩释放制动之前,可能存在发动机以DCCO模式操作的一个或多个发动机循环。
如上文所指出的,可能有时期望将曲轴与变速器或传动系的其他部分断开联接。因此,当进入DCCO模式时,如步骤724中表示的,动力传动系控制器可以可选地引导变矩器离合器(TCC)或其他离合器或传动系滑差控制机构,以至少部分地将曲轴与变速器断开联接,从而降低车辆速度与发动机速度之间的耦合。可能的断开联接程度将倾向于随并入动力传动系中的(多个)特定传动系滑差控制机构改变。存在可能期望将发动机与传动系机械断开联接的多种操作条件。例如,当车辆速度是零但发动机速度不是零时,期望断开联接。在减速期间,可能还期望将发动机与传动系断开联接,尤其是在使用摩擦制动时。比如变速器换档等其他条件也频繁地受益于使发动机与传动系断开联接。因此,挡位变换状态可以用作确定是否适合过渡到使用DCCO或跳过气缸压缩制动的变量。
DCCO(减速气缸切断)的特性是,发动机的阻力由于泵送损失的减少而比DFCO(减速燃料切断)期间更小。在实践中,当发动机与变速器有效地分离时,差别是相当显著的并且可以轻易地观察到。如果容许的话,DFCO泵送损失将导致许多发动机在大约一秒或至多两秒的时段内减速至停止,而相同发动机可以在DCCO(气缸切断)下花费5-10倍的时长来减速至停止。由于DFCO相当快速地止动发动机,因此在DFCO期间保持传动系接合是常见的,这意味着发动机倾向于随着车辆减速并且与DFCO相关联的泵送损失对发动机制动有影响。相比之下,当使用DCCO时,发动机可以在由传动系部件(例如,变矩器离合器(TCC)、双离合器变速器等)容许的程度上与变速器分离。在实践中,在某些操作情况下,这允许DCCO在比DFCO更长的时段内使用。
使用DCCO操作的优点是,大量空气不会被泵送通过发动机,从而增加排气温度。柴油发动机对通过其后处理系统的过量空气是特别敏感的,这样可能降低后处理元件的温度,从而导致过量的有害排放。图7中描绘的控制逻辑还可以通过操作者仅使用加速器和制动踏板在产生正转矩、零转矩和负转矩之间无缝地切换发动机而改进车辆驾驶性能。这样降低了对人工决定何时需要最小到适度使用压力释放制动的需要。
发动机可以保持在DCCO或跳过气缸压缩制动模式,直到发动机控制器确定是时候退出这些模式中的任何一种。两个最常见的退出触发因素往往是当接收到正转矩请求时或者当发动机减慢到怠速操作被视为合适的速度时。发动机速度的进一步降低可以导致不期望的发动机熄火,因此发动机被置于怠速操作以避免熄火。通常,正转矩请求是由压下加速踏板(在本文中有时称为加速踏板轻踩)引起的。然而,可能存在需要转矩的独立于加速踏板轻踩的各种其他情形,这样的控制信号来自巡航控制系统或自主车辆控制系统。例如,这些类型的情形可以在比如空调等附件需要转矩时发生。许多车辆空调是通过将空调离合器接合到车辆动力传动系从而将额外的扭矩负载置于发动机上而被启用。
当车辆或卡车组装好时,排气系统的声学响应特性是已知的。所制造的排气系统的特性可以被预先编程到发动机控制器中,以便允许其选择适当的频率和频率范围,以避免以跳过气缸压缩制动模式操作的时候。如果原始排气系统被修改;例如,为了增加排放控制部件或者用具有不同声学特性的新部件替换退化的部件,可以改变排气系统的整体声学响应。在这种情况下,用于声学控制算法的原始校准可能存在误差,从而当以跳过气缸制动模式操作时可能导致不可接受或违法的噪声水平。
在这种情况下,控制算法的重新校准可以在“训练模式”下进行,该训练模式监测各种跳过气缸压缩制动条件下的声学特性。这可以采取车载软件的形式,该车载软件使用存在于车厢内的麦克风;例如,用于免提电话用途、语音识别或主动噪声控制。它也可以采取非车载软件和麦克风的形式;例如,以在测试者平板电脑或移动电话上运行并使用其(多个)麦克风的软件应用程序的形式。通过重新校准控制算法,可以使车辆在可接受的噪声水平下操作。
可以开发满足强制性噪声标准的认证过程。这样将允许在没有操作者干预的情况下使用跳过气缸压缩制动。自动系统操作对操作者而言是透明的,从而消除了对禁止使用手动压力释放制动系统的担忧。这样最大化减少摩擦制动器的磨损和撕裂以及减少驾驶者分心的益处。
以类似于先前描述的发动机产生转矩的情况的方式,是进入DCCO模式还是进入跳过气缸制动模式的决定可以至少部分地基于车辆重量。如果发动机正以跳过气缸压缩制动模式操作,则跳过制动分数或模式可以至少部分地取决于车辆重量。对于轻载的车辆,跳过气缸制动分数或模式一般将比车辆被加载更重负载的情况产生更多的NVH。因此,如果车辆被加载更重负载,则更多的跳过气缸制动分数或模式将是可用的。当然,对于加载更重负载的车辆,使车辆减慢所需的发动机转矩也将更大。
在一些实施例中,内燃发动机可以是混合动力传动系的一部分,除了内燃发动机之外,该混合动力传动系还包括电动机/发电机。电动机/发电机可以增加动力传动系的转矩或从动力传动系减去转矩。如果电动机/发电机正在从动力传动系减去转矩,则从动力传动系获取的能量可以被储存在电池中。当需要时,所储存的能量可以以正转矩的形式增加回到动力传动系。
电动机/发电机可以用于从动力传动系减去转矩,作为使用跳过气缸压缩制动的替代或补充。使用电池储存动力传动系能量取决于电池荷电状态和电池温度。如果电池被充满电或几乎充满电,则很少的转矩或没有转矩可以通过电动机/发电机从动力传动系转移,因此必须主要或排他地使用跳过气缸制动。相反,如果电池电量耗尽,则大量的转矩可以通过电动机/发电机从动力传动系转移,因此可以轻微使用或根本不使用跳过气缸制动。电池的充电和放电速率取决于电池的温度,因此这也可能影响使用跳过气缸压缩制动的程度。在混合动力系统中,发动机可以在停止/启动模式下操作,在该模式下当存在对于零转矩或负转矩的请求时,发动机在行驶循环期间自动地关闭自身。通过使用电动机/发电机增加和转移转矩,可以改进整个动力传动系的燃料效率,因为通过跳过气缸压缩制动从动力传动系减去的转矩代表了不能回收的损失能量。
应当理解,发动机控制器130不限于图5和图6中所示的具体布置。可以将所展示模块中的一个或多个集成在一起。可替代地,特定模块的特征可以代替地分布于多个模块中。发动机控制器还可以包括基于转让给申请人的其他专利和专利申请的附加特征、模块或操作,这些专利和专利申请包括美国专利号7,954,474、7,886,715、7,849,835、7,577,511、8,099,224、8,131,445、8,131,447、8,616,181、8,701,628、9,086,020、9,200,575、9,328,672、9,739,212、9,790,867、9,983,583、10,167,799、10,247,072、10,247,121,以及美国专利申请号16/576,972。出于所有目的,这些专利和专利申请中的每一个在此通过援引以其全部内容并入本文。上述专利或专利申请中描述的任何特征、模块和操作可以被添加到所展示的发动机控制器130。在各种替代性实施方式中,可以使用微处理器、发动机控制单元(ECU)或其他计算装置,使用模拟或数字部件,使用可编程逻辑,使用前述各项的组合和/或以任何其他合适的方式在算法上实现这些功能块。
本发明主要是在操作适合用于机动车辆的四冲程内燃发动机的背景下描述的。内燃发动机可以是火花点火式发动机或压缩点火式发动机。然而,应当理解,所描述的应用非常适合用于多种多样的内燃发动机中。这些内燃发动机包括用于几乎任何类型的车辆或平台(包括汽车、卡车、船只、飞行器、摩托车、轻便摩托车、机车、船舶、飞行器等)的发动机;以及用于涉及对工作室的点火并利用内燃发动机的几乎任何其他应用的发动机。所描述的这些不同途径与在多种多样的不同热力学循环下操作的发动机一起工作,包括几乎任何类型的两冲程活塞发动机、柴油发动机、奥托循环发动机、双循环发动机、米勒循环发动机、阿克金森循环发动机、转子(Wankel)发动机以及其他类型的旋转发动机、混合循环发动机(例如,奥托和狄塞尔双循环发动机)、混合发动机、径向发动机等。还相信所描述的方法将适用于新开发的内燃发动机,无论它们是利用当前已知的还是后来开发的热力学循环进行操作。发动机可以是自然吸气式的,或具有涡轮增压器、增压器或双增压器的增压式的。在增压式发动机的情况下,最大气缸负载可以对应于通过对空气进气进行增压获得的最大气缸空气充气。
虽然仅详细描述了本发明的几个实施例,但是应当理解,在不脱离本发明的精神或范围的情况下,本发明可以以许多其他形式实施。若干次引用了术语点火分数。应了解的是,可以用多种多样的方式来表达或表示点火分数。例如,点火分数可以采取点火模式、顺序、或包含或固有地传达前述点火密度或百分比的任何其他点火特征的形式。还若干次引用了术语“气缸”。应理解的是术语气缸应理解为广义地涵盖任何适合类型的工作室。因此,本发明实施例应当被认为是说明性的而非限制性的,并且本发明不限于在此给出的细节。