成组立模中能自动旋转弯折的侧部锁紧装置
文献发布时间:2023-06-19 19:23:34
技术领域
本发明涉及一种成组立模机,具体与成组立模机中侧部锁紧装置有关,特别是一种成组立模中能自动旋转弯折的侧部锁紧装置。
背景技术
传统的成组立模(机)侧部锁紧装置具有液压缸锁紧机构、锁紧杆组件,液压缸锁紧机构分别设于模板系统的左右两侧,锁紧杆组件分别设于模板系统的左右两侧;上述成组立模侧部锁紧装置在开合的时候,需要操作者手动去旋转,但上方锁紧杆组件和液压缸锁紧机构均距离地面较高(最高的锁紧杆组件距离地面有3米多高),并且液压缸锁紧机构(距离地面也有2.4米左右)很重,人工旋转也很费力,操作不方便,也不安全。
相关专利文献:CN217292762U公开了一种可调节构件厚度自动行走的成组立模机,具有模板系统、行走系统、液压开合模系统。液压开合模系统具有数对液压拉紧机构、数对拉紧杆总成、数个拉紧杆组件,每对所述的液压拉紧机构分别设于模板系统的前后两侧,上述中间立模的前后两侧面通过每对所述的液压拉紧机构分别与端头立模的前后两侧面相连接;每对所述的拉紧杆总成分别设于模板系统的前后两侧,上述中间立模的前后两侧面通过每对所述的拉紧杆总成分别与端头立模的前后两侧面相连接;每个所述的拉紧杆组件皆设于模板系统的底端,上述中间立模的底端面通过每个所述的拉紧杆组件与端头立模的底端面相连接。CN209781255U公开了一种工业风扇连接杆的延长结构,延长结构的上端固定于室内顶部的基座,所述延长结构包括若干延长杆,若干延长杆之间为可转动连接,实现弯折以避开障碍物。
以上技术并未解决成组立模侧部锁紧装置在开合的时候,需要操作者手动去旋转,费力、操作不便的问题。
发明内容
本发明的目的在于提供一种成组立模中能自动旋转弯折的侧部锁紧装置,采用该侧部锁紧装置,操作者仅需按动按钮即可控制侧部锁紧装置的开合,同时开合过程中锁紧杆旋转遇到障碍物时会自动弯折以避开障碍物,以解决成组立模侧部锁紧装置在开合的时候,需要操作者手动去旋转,费力、操作不便的问题。
为解决上述技术问题,本发明采用的技术方案如下:
一种成组立模中能自动旋转弯折的侧部锁紧装置(或者说是成组立模中能自动折叠的侧部拉紧装置),具有模板系统、数对液压缸锁紧机构、数对锁紧杆组件,每对所述的液压缸锁紧机构分别设于模板系统的左右两侧,每对所述的锁紧杆组件分别设于模板系统的左右两侧;模板系统中,移动节立模的左右两侧面通过每对所述的液压缸锁紧机构分别与固定节立模的左右两侧面相连接;移动节立模的左右两侧面通过每对所述的锁紧杆组件分别与固定节立模的左右两侧面相连接。
每个所述的液压缸锁紧机构皆具有固定于固定节立模的侧面上的第一连接座、固定于移动节立模的侧面上的第二连接座、呈水平设置的液压缸、锁紧杆体(连接杆),液压缸的缸筒座与第一连接座铰接,液压缸的活塞杆与锁紧杆体的一端可拆卸地相连接,锁紧杆体的另一端与第二连接座铰接;每个所述的锁紧杆组件皆具有固定于固定节立模的侧面上的第一座体、固定于移动节立模的侧面上的第二座体、锁紧杆、锁母,锁紧杆的一端与第一座体铰接,锁紧杆的另一端穿过第二座体的前侧面上的U形槽与锁母螺纹连接,其技术方案在于:每个所述的液压缸锁紧机构还具有在完成液压缸锁紧机构的开合动作时驱动液压缸转动的第一动力装置和驱动锁紧杆体转动的第二动力装置;每个所述的锁紧杆组件还具有在完成该锁紧杆组件的开合动作时带动锁紧杆旋转的第三动力装置和使锁紧杆旋转中遇到障碍物发生弯折的弹性复位机构。
上述技术方案中,优选的技术方案可以是,所述的液压缸锁紧机构的数量为一对,锁紧杆组件的数量为两对,在模板系统的左侧、右侧中的任意一侧,两个所述锁紧杆组件分别位于模板系统的上部和下部,(一个)液压缸锁紧机构位于模板系统的中部,(一个)液压缸锁紧机构位于两个所述锁紧杆组件之间。
上述技术方案中,优选的技术方案还可以是,所述的第一动力装置最好具有第一支座、第一动力源、第一拨杆、第一套环、第一行程开关和第二行程开关,第一行程开关用于液压缸旋转到固定节立模的后端面时第一拨杆与之发生触碰而使第一动力装置停止动作,第二行程开关用于液压缸旋转到固定节立模的侧面(左侧面或者右侧面)完成闭合复位时第一拨杆与之发生触碰而使第一动力装置停止动作。即液压缸旋转到固定节立模的后端面时第一拨杆触碰到对应的第一行程开关,第一动力装置停止动作,液压缸旋转到固定节立模的侧面(左侧面或者右侧面)完成闭合复位时第一拨杆触碰到对应的第二行程开关,第一动力装置停止动作。第一支座固定在第一连接座上,第一动力源的底座固定安装在第一支座上, 第一动力源的动力输出端与第一拨杆的横向臂的一端固定连接,第一拨杆的横向臂的另一端与第一拨杆的纵向臂的一端(上端)固定连接,第一拨杆的纵向臂的另一端(下端)由套装在液压缸的缸筒外壁上的第一套环上的开口槽限位(该开口槽为长条形,第一拨杆的纵向臂的下端插入该开口槽,第一拨杆的纵向臂的下端可带端头,以下相关结构相似),第一行程开关的底座、第二行程开关的底座固定安装在第一支座上(可位于第一支座的后面、前面两侧)。
上述技术方案中,优选的技术方案还可以是,所述的第二动力装置最好具有第二支座、第二动力源、第二拨杆、第二套环、第三行程开关和第四行程开关,第三行程开关用于锁紧杆体旋转到移动节立模的前端面时锁紧杆体与之发生触碰而使第二动力装置停止动作,第四行程开关用于锁紧杆体旋转到移动节立模的侧面(左侧面或者右侧面)完成闭合复位时锁紧杆体与之发生触碰而使第二动力装置停止动作。即锁紧杆体旋转到移动节立模的前端面时锁紧杆体触碰到对应的第三行程开关,第二动力装置停止动作,锁紧杆体旋转到移动节立模的侧面(左侧面或者右侧面)完成闭合复位时锁紧杆体触碰到对应的第四行程开关,第二动力装置停止动作。第二支座固定在第二连接座上,第二动力源的底座固定安装在第二支座上,第二动力源的动力输出端与第二拨杆的横向臂的一端固定连接,第二拨杆的横向臂的另一端与第二拨杆的纵向臂的一端(下端)固定连接,第二拨杆的纵向臂的另一端(上端)由固定在锁紧杆体的外壁上的第二套环上的开口槽限位(该开口槽为长条形,第二拨杆的纵向臂的上端插入该开口槽中),第三行程开关的底座、第四行程开关的底座固定安装在第二连接座上。
上述技术方案中,优选的技术方案还可以是,所述的第三动力装置最好具有第三支座、第三动力源、第三拨杆、第三套环、第五行程开关和第六行程开关,第五行程开关用于锁紧杆旋转到固定节立模的后端面时第三拨杆与之发生触碰而使第三动力装置停止动作,第六行程开关用于锁紧杆旋转到固定节立模的侧面(左侧面或者右侧面)完成闭合复位时第三拨杆与之发生触碰而使第三动力装置停止动作。即锁紧杆旋转到固定节立模的后端面时第三拨杆触碰到对应的第五行程开关,第三动力装置停止动作,锁紧杆旋转到固定节立模的侧面(左侧面或者右侧面)完成闭合复位时第三拨杆触碰到对应的第六行程开关,第三动力装置停止动作。第三支座固定在第一座体上,第三动力源的底座固定安装在第三支座上,第三动力源的动力输出端与第三拨杆的横向臂的一端固定连接,第三拨杆的横向臂的另一端与第三拨杆的纵向臂的一端(上端)铰接,第三拨杆的纵向臂的另一端(下端)由固定在锁紧杆的外壁上的第三套环上的开口槽限位(该开口槽为长条形,第三拨杆的纵向臂的下端插入该开口槽中),第五行程开关的底座、第六行程开关的底座固定安装在第三支座的上端面上。
上述技术方案中,优选的技术方案还可以是,所述的弹性复位机构最好具有呈横向设置的U形座体、呈纵向设置的销轴、套装在销轴上的第一扭簧、套装在销轴上的第二扭簧、定位销、定位座,锁紧杆中间断开而将锁紧杆分为锁紧杆内侧段、锁紧杆外侧段;锁紧杆内侧段、锁紧杆外侧段通过弹性复位机构相连接,在该连接处,锁紧杆内侧段的端头与所述的座体固定连接,锁紧杆外侧段具有与销轴连接的端头,所述的座体具有销轴穿过的一对纵向孔,所述的端头具有销轴穿过的一个纵向孔,销轴同时穿过第一扭簧、座体上的一对纵向孔、端头上的纵向孔、第二扭簧且销轴的底端套装有定位座,定位销将定位座固定在销轴的底端;第一扭簧的一端固定在(或者说是抵在)所述的座体的上端面,第一扭簧的另一端呈弯曲状并钩住锁紧杆外侧段,第二扭簧的一端固定在(或者说是抵在)所述的座体的下端面,第二扭簧的另一端呈弯曲状并钩住锁紧杆外侧段。
上述技术方案中,优选的技术方案还可以是,所述的锁紧杆中间断开的位置最好处于锁紧杆的中部。液压缸的活塞杆与锁紧杆体的一端可拆卸地相连接的结构最好是,所述活塞杆的顶部带有圆环形凹槽,锁紧杆体的一端带有空腔,该空腔的顶部开口,活塞杆的顶部的圆环形凹槽与空腔的顶部开口相配合而使锁紧杆体钩住液压缸的活塞杆(形成钩住结构)。上述第一动力源、第二动力源、第三动力源可以为液压马达、气动马达、电动马达中的一种。各动力源包括但不限于液压马达、气动马达、电动马达,还可以为其它动力机构。
上述技术方案中,优选的技术方案还可以是,所述的弹性复位机构还具有防晃缓冲结构,所述销轴与所述座体固定连接,该防晃缓冲结构具有多个(可以是6-12个)凹陷圆弧面(圆弧面凹陷)和多个圆柱体形的橡胶柱,多个凹陷圆弧面位于所述端头的纵向孔内侧壁上且呈纵向设置,多个所述橡胶柱与多个凹陷圆弧面一一相对应,多个圆柱体形橡胶柱与多个凹陷圆弧面一一相对应,多个凹陷圆弧面沿所述端头的纵向孔内侧壁呈均匀分布,每个所述凹陷圆弧面中设有呈纵向设置的一个橡胶柱;在所述销轴与所述端头的纵向孔未配合状态,橡胶柱的直径小于凹陷圆弧面的直径,从锁紧杆外侧段起沿顺时针方向,多个凹陷圆弧面的深度依次变小,相应地,多个所述的橡胶柱从所述端头的内侧壁伸出的高度依次变大,多个(其中四个)橡胶柱的中心与所述端头的内侧壁的中心距用R1、R2、R3、R4表示数值,其中R1>R2>R3>R4,在所述销轴与所述端头的纵向孔配合状态,销轴在与所述端头的纵向孔配合处对多个所述的橡胶柱挤压,多个所述的橡胶柱被压缩。(每个)凹陷圆弧面为(其对应的)橡胶柱留出变形空间,受销轴挤压的(每个)橡胶柱的一部分填充进(其对应的)凹陷圆弧面中。
本发明具有模板系统、数对液压缸锁紧机构、数对锁紧杆组件,其特点是每个所述的液压缸锁紧机构还具有在完成液压缸锁紧机构的开合动作时驱动液压缸转动的第一动力装置、驱动锁紧杆体转动的第二动力装置;每个所述的锁紧杆组件还具有在完成该锁紧杆组件的开合动作时带动锁紧杆旋转的第三动力装置、使锁紧杆旋转中遇到障碍物发生弯折的弹性复位机构。这样,本发明中弹性复位机构的作用是,锁紧杆从模板系统的右侧向固定节立模的后端面旋转过程中,如果锁紧杆没遇到其它障碍,锁紧杆作为一个整体始终是伸直的。若锁紧杆作为一个整体从模板系统的右侧向固定节立模的后端面旋转,当锁紧杆前部遇到平台支撑立柱(遇到障碍物)后,锁紧杆外侧段绕销轴(向后)弯折,使锁紧杆能绕过障碍物,受第一、二扭簧的作用,锁紧杆外侧段复位;反之,锁紧杆作为一个整体从模板系统的后端面向固定节立模的右侧旋转;当锁紧杆前部遇到平台支撑立柱(遇到障碍物)后,锁紧杆外侧段绕销轴(向前)弯折,使锁紧杆能绕过障碍物,受第一、二扭簧的作用,锁紧杆外侧段复位。操作者仅需按动按钮,使第一动力源、第二动力源、第三动力源转动,第一动力源的动力输出端带动第一拨杆转动,从而带动液压缸转动;第二动力源的动力输出端带动第二拨杆转动,从而带动锁紧杆体转动;第三动力源的动力输出端带动第三拨杆转动,从而带动锁紧杆转动。这样操作者仅需按动按钮即可完成锁紧装置的开或者合动作,对于锁紧杆,由于其整体长度太长,设置了弹性复位机构,可在锁紧杆旋转的同时,自动完成弯折(折叠)工作,整个过程方便、可靠和安全,自动化程度高。
综上所述,本发明提供了一种成组立模中能自动旋转弯折的侧部锁紧装置,采用该侧部锁紧装置,操作者仅需按动按钮即可控制侧部锁紧装置的开合,同时开合过程中锁紧杆旋转遇到障碍物时会自动弯折以避开障碍物,解决了成组立模侧部锁紧装置在开合的时候,需要操作者手动去旋转,费力、操作不便的问题。与相关技术相比,采用本发明的成组立模中能自动旋转弯折的侧部锁紧装置后,成组立模侧部锁紧装置开合时的工效提高了15%以上。
附图说明
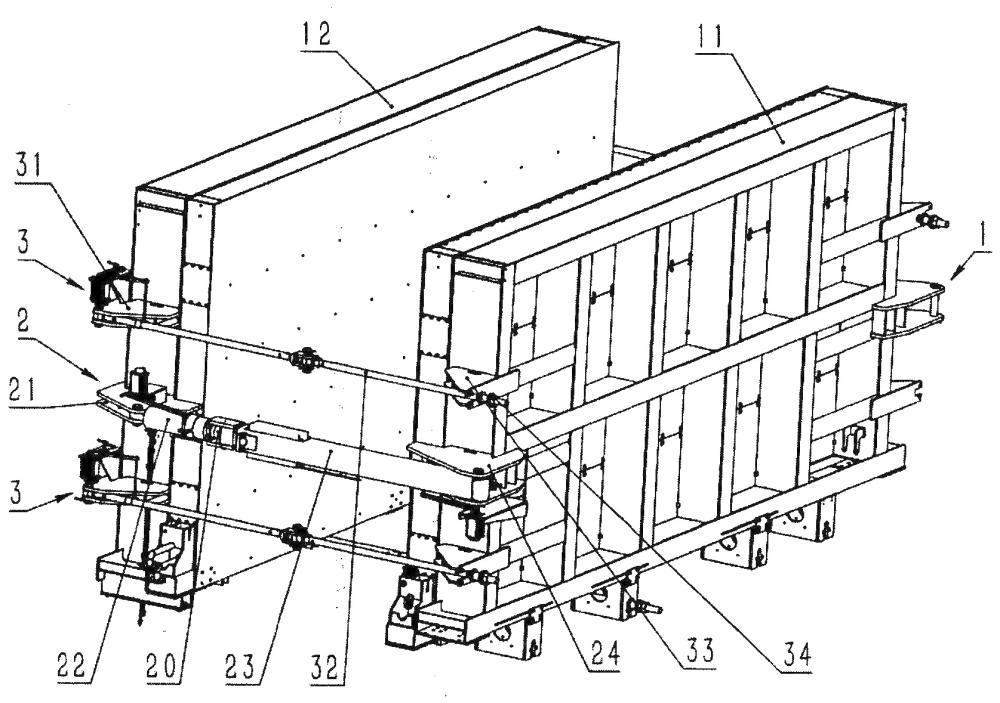
图1为本发明的结构示意图(立体图)。
图2为本发明中液压缸锁紧机构的第一动力装置的结构示意图(立体图)。
图3为本发明中液压缸锁紧机构的第二动力装置的结构示意图(立体图,锁紧杆体旋转小于90°)。
图4为本发明中液压缸锁紧机构的第二动力装置的结构示意图(立体图,锁紧杆体旋转大于180°,小于270°)。
图5为本发明中锁紧杆组件的第三动力装置、弹性复位机构的结构示意图(立体图)。
图6为本发明中弹性复位机构的结构示意图(立体图)。
图7为本发明的弹性复位机构中销轴与锁紧杆外侧段上的端头相连接处所设置的防晃缓冲结构的示意图(横剖面图)。
图8本发明的弹性复位机构中所述的防晃缓冲结构的示意图(横剖面图)。
实施方式
为使本发明的发明目的、技术方案和优点更加清楚,下面将结合实施例对本发明的技术方案进行清楚、完整的描述。显然,所描述的实施例仅是本发明一部分实施例,而非全部实施例。基于下面的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
实施例1:如图1、图2、图3、图4、图5、图6所示,本发明的成组立模中能自动旋转弯折的侧部锁紧装置具有模板系统1、数对液压缸锁紧机构2和数对锁紧杆组件3。每对所述的液压缸锁紧机构2分别设于模板系统1的左右两侧,每对所述的锁紧杆组件3分别设于模板系统1的左右两侧。模板系统1中,移动节立模11的左右两侧面通过每对所述的液压缸锁紧机构2分别与固定节立模12的左右两侧面相连接;移动节立模11的左右两侧面通过每对所述的锁紧杆组件3分别与固定节立模12的左右两侧面相连接。液压缸锁紧机构2的数量最好为一对,锁紧杆组件3的数量最好为两对。在模板系统1的左侧、右侧中的任意一侧,两个所述锁紧杆组件3分别位于模板系统1的上部和下部,(一个)液压缸锁紧机构2位于模板系统(1)的中部,(一个)液压缸锁紧机构2位于两个所述锁紧杆组件3之间。每个所述的液压缸锁紧机构2皆具有固定于固定节立模12的侧面上的第一连接座21、固定于移动节立模11的侧面上的第二连接座24、呈水平设置的液压缸22、锁紧杆体23(锁紧杆体即连接杆)。液压缸22的缸筒座与第一连接座21铰接,液压缸22的活塞杆与锁紧杆体23的一端可拆卸地相连接,锁紧杆体23的另一端与第二连接座24铰接。每个所述的锁紧杆组件3皆具有固定于固定节立模12的侧面上的第一座体31、固定于移动节立模11的侧面上的第二座体33、锁紧杆32、锁母34。锁紧杆32的一端与第一座体31铰接,锁紧杆32的另一端穿过第二座体33的前侧面上的U形槽与锁母34螺纹连接。每个所述的液压缸锁紧机构2还具有在完成液压缸锁紧机构的开合动作时驱动液压缸22转动的第一动力装置25和驱动锁紧杆体23转动的第二动力装置26。每个所述的锁紧杆组件3还具有在完成该锁紧杆组件的开合动作时带动锁紧杆32旋转的第三动力装置35和使锁紧杆32旋转中遇到障碍物发生弯折的弹性复位机构36。
如图1、图2、图3、图4、图5所示,第一动力装置25具有第一支座250、第一动力源251、第一拨杆253、第一套环254、第一行程开关252和第二行程开关255,第一行程开关252用于液压缸旋转到固定节立模12的后端面时第一拨杆与之发生触碰而使第一动力装置停止动作,第二行程开关255用于液压缸旋转到固定节立模12的侧面(左侧面或者右侧面)完成闭合复位时第一拨杆与之发生触碰而使第一动力装置停止动作。即液压缸旋转到固定节立模12的后端面时第一拨杆触碰到对应的第一行程开关,第一动力装置25停止动作,液压缸旋转到固定节立模12的侧面(左侧面或者右侧面)完成闭合复位时第一拨杆触碰到对应的第二行程开关,第一动力装置25停止动作。第一支座250固定在第一连接座21上,第一动力源251的底座固定安装在第一支座250上, 第一动力源251的动力输出端与第一拨杆253的横向臂的一端固定连接,第一拨杆253的横向臂的另一端与第一拨杆253的纵向臂的一端(上端)固定连接,第一拨杆253的纵向臂的另一端(下端)由套装在液压缸的缸筒外壁上的第一套环254上的开口槽限位(该开口槽为长条形,第一拨杆的纵向臂的下端插入该开口槽,第一拨杆的纵向臂的下端可带端头,以下相关结构相似),第一行程开关252的底座、第二行程开关252的底座固定安装在第一支座250上(可位于第一支座的后面、前面两侧)。
如图1、图2、图3、图4、图5所示,第二动力装置26具有第二支座260、第二动力源261、第二拨杆262、第二套环263、第三行程开关264和第四行程开关265,第三行程开关264用于锁紧杆体旋转到移动节立模11的前端面时锁紧杆体与之发生触碰而使第二动力装置停止动作,第四行程开关265用于锁紧杆体旋转到移动节立模11的侧面(左侧面或者右侧面)完成闭合复位时锁紧杆体与之发生触碰而使第二动力装置停止动作。即锁紧杆体旋转到移动节立模11的前端面时锁紧杆体触碰到对应的第三行程开关,第二动力装置26停止动作,锁紧杆体旋转到移动节立模11的侧面(左侧面或者右侧面)完成闭合复位时锁紧杆体触碰到对应的第四行程开关,第二动力装置25停止动作。第二支座260固定在第二连接座24上,第二动力源261的底座固定安装在第二支座260上,第二动力源261的动力输出端与第二拨杆262的横向臂的一端固定连接,第二拨杆262的横向臂的另一端与第二拨杆262的纵向臂的一端(下端)固定连接,第二拨杆262的纵向臂的另一端(上端)由固定在锁紧杆体的外壁上的第二套环263上的开口槽限位(该开口槽为长条形,第二拨杆的纵向臂的上端插入该开口槽中),第三行程开关264的底座、第四行程开关265的底座固定安装在第二连接座24上。
如图1、图2、图3、图4、图5所示,第三动力装置35具有第三支座350、第三动力源351、第三拨杆353、第三套环352、第五行程开关355和第六行程开关354,第五行程开关355用于锁紧杆旋转到固定节立模12的后端面时第三拨杆与之发生触碰而使第三动力装置停止动作,第六行程开关354用于锁紧杆旋转到固定节立模12的侧面(左侧面或者右侧面)完成闭合复位时第三拨杆与之发生触碰而使第三动力装置停止动作。即锁紧杆旋转到固定节立模12的后端面时第三拨杆触碰到对应的第五行程开关,第三动力装置35停止动作,锁紧杆旋转到固定节立模12的侧面(左侧面或者右侧面)完成闭合复位时第三拨杆触碰到对应的第六行程开关,第三动力装置35停止动作。第三支座350固定在第一座体31上,第三动力源351的底座固定安装在第三支座350上,第三动力源351的动力输出端与第三拨杆353的横向臂的一端固定连接,第三拨杆353的横向臂的另一端与第三拨杆353的纵向臂的一端(上端)铰接,第三拨杆353的纵向臂的另一端(下端)由固定在锁紧杆的外壁上的第三套环352上的开口槽限位(该开口槽为长条形,第三拨杆的纵向臂的下端插入该开口槽中),第五行程开关355的底座、第六行程开关354的底座固定安装在第三支座350的上端面上。
如图1、图5、图6所示,弹性复位机构36具有呈横向设置的U形座体361、呈纵向设置的销轴362、套装在销轴上的第一扭簧363、套装在销轴上的第二扭簧365、定位销364、定位座360。锁紧杆32中间断开而将锁紧杆分为锁紧杆内侧段321、锁紧杆外侧段322;锁紧杆内侧段321、锁紧杆外侧段322通过弹性复位机构36相连接,在该连接处,锁紧杆内侧段321的端头与所述的座体361固定连接(锁紧杆内侧段的端头与锁紧杆内侧段本体之间的长度可以调节),锁紧杆外侧段322具有与销轴362连接的端头366,所述的座体361具有销轴362穿过的一对纵向孔,所述的端头366具有销轴362穿过的一个纵向孔,销轴362同时穿过第一扭簧、座体361上的一对纵向孔、端头366上的纵向孔、第二扭簧365且销轴的底端套装有定位座360,定位销364将定位座360固定在销轴362的底端;第一扭簧363的一端固定在(或者说是抵在)所述的座体361的上端面,第一扭簧363的另一端呈弯曲状并钩住锁紧杆外侧段322,第二扭簧365的一端固定在(或者说是抵在)所述的座体361的下端面,第二扭簧365的另一端呈弯曲状并钩住锁紧杆外侧段322。弹性复位机构的作用是,锁紧杆从模板系统的右侧向固定节立模12的后端面旋转过程中,如果锁紧杆没遇到其它障碍,锁紧杆作为一个整体始终是伸直的。若锁紧杆作为一个整体从模板系统的右侧向固定节立模12的后端面旋转,当锁紧杆前部遇到平台支撑立柱(遇到障碍物)后,锁紧杆外侧段322绕销轴362(向后)弯折(折叠,相当于锁紧杆外侧段沿逆时针方向转动一定角度),使锁紧杆能绕过障碍物,受第一、二扭簧的作用,锁紧杆外侧段322复位;反之,锁紧杆作为一个整体从模板系统的后端面向固定节立模12的右侧旋转;当锁紧杆前部遇到平台支撑立柱(遇到障碍物)后,锁紧杆外侧段322绕销轴362(向前)弯折(相当于锁紧杆外侧段沿顺时针方向转动一定角度),使锁紧杆能绕过障碍物,受第一、二扭簧的作用,锁紧杆外侧段322复位。
如图1、图2、图3、图4、图5、图6所示,上述的锁紧杆32中间断开的位置最好处于锁紧杆32的中部。液压缸22的活塞杆与锁紧杆体23的一端可拆卸地相连接的结构最好是,所述活塞杆的顶部带有圆环形凹槽201,锁紧杆体23的一端带有空腔202,该空腔202的顶部开口,活塞杆的顶部的圆环形凹槽201与空腔202的顶部开口相配合而使锁紧杆体23钩住液压缸22的活塞杆(形成钩住结构20)。上述第一动力源251、第二动力源261、第三动力源351可以为液压马达、气动马达、电动马达中的一种(本实施例可以选择液压马达)。各动力源包括但不限于液压马达、气动马达、电动马达,还可以为其它动力机构。上述液压缸22旋转的角度、锁紧杆体23旋转的角度、锁紧杆32旋转的角度可以从0°接近270°,液压缸22、锁紧杆体23、锁紧杆32旋转的初始位置(开始位置)、终止位置皆由每个动力装置中的两个行程开关控制调整,各行程开关可以为摇臂式行程开关。
本发明工作时,操作者仅需按动按钮,使第一动力源251、第二动力源261、第三动力源351转动,第一动力源251的动力输出端带动第一拨杆253转动,从而带动液压缸22转动;第二动力源261的动力输出端带动第二拨杆262转动,从而带动锁紧杆体23转动;第三动力源351的动力输出端带动第三拨杆353转动,从而带动锁紧杆32转动。这样操作者仅需按动按钮即可完成锁紧装置的开或者合动作,对于锁紧杆32,由于其整体长度太长,设置了弹性复位机构36,可在锁紧杆旋转的同时,自动完成弯折(折叠)工作,整个过程方便、可靠和安全,自动化程度高。
实施例2:如图7、图8、图1所示,本发明的实施例2与实施例相近似,所不同的是,弹性复位机构36还可具有防晃缓冲结构,所述销轴362与所述座体361固定连接,该防晃缓冲结构具有多个(可以选择6-8个)凹陷圆弧面368(凹陷圆弧面即圆弧面凹陷)和多个圆柱体形的橡胶柱367,多个凹陷圆弧面368位于所述端头366的纵向孔内侧壁上且呈纵向设置,多个所述橡胶柱与多个凹陷圆弧面一一相对应。多个凹陷圆弧面368沿所述端头366的纵向孔内侧壁呈均匀分布,每个所述凹陷圆弧面中设有呈纵向设置的一个橡胶柱367;在所述销轴362与所述端头366的纵向孔未配合状态,橡胶柱367的直径小于凹陷圆弧面的直径,从锁紧杆外侧段322起沿顺时针方向,多个凹陷圆弧面368的深度依次变小,相应地,多个所述的橡胶柱367从所述端头366的内侧壁伸出的高度依次变大,多个(其中四个)橡胶柱的中心与所述端头366的内侧壁的中心距用R1、R2、R3、R4表示数值,其中R1>R2>R3>R4,在所述销轴362与所述端头366的纵向孔配合状态,销轴362在与所述端头366的纵向孔配合处对多个所述的橡胶柱367挤压,多个所述的橡胶柱367被压缩。(每个)凹陷圆弧面368为(其对应的)橡胶柱367留出变形空间,受销轴挤压的(每个)橡胶柱的一部分填充进(其对应的)凹陷圆弧面中。当锁紧杆前部遇到平台支撑立柱(遇到障碍物)后,锁紧杆外侧段322绕销轴362(向后)弯折(相当于锁紧杆外侧段沿逆时针方向转动一定角度),反之,锁紧杆作为一个整体从模板系统的后端面向固定节立模12的右侧旋转,当锁紧杆前部遇到平台支撑立柱(遇到障碍物)后,锁紧杆外侧段322绕销轴362(向前)弯折(相当于锁紧杆外侧段沿顺时针方向转动一定角度),因遇到障碍物(发生碰撞),锁紧杆外侧段322沿销轴顺、逆时针方向转动时,所述端头366受到的销轴362的作用力是变化的,端头366的纵向孔在不同的区域受到的阻力有大有小(若阻力全大容易锁死,不易弯折;阻力全小起不到降低锁紧杆外侧段的弯折速度),锁紧杆外侧段碰撞障碍物后,锁紧杆外侧段的弯折速度会降低,锁紧杆外侧段、锁紧杆减少了晃动,同时销轴362与所述端头366的纵向孔配合处能减轻(或者说是吸收)因碰撞障碍物产生的振动,经试验,采用防晃缓冲结构后,遇到障碍物(发生碰撞),锁紧杆外侧段、锁紧杆工作平稳,不会产生晃动现象。工作更可靠、安全。
综上所述,本发明的以上实施例提供了一种成组立模中能自动旋转弯折的侧部锁紧装置,采用该侧部锁紧装置,操作者仅需按动按钮即可控制侧部锁紧装置的开合,同时开合过程中锁紧杆旋转遇到障碍物时会自动弯折以避开障碍物,解决了成组立模侧部锁紧装置在开合的时候,需要操作者手动去旋转,费力、操作不便的问题。与相关技术相比,采用本发明的成组立模中能自动旋转弯折的侧部锁紧装置后,成组立模侧部锁紧装置开合时的工效提高了15%以上。