一种全自动双工位石墨坩埚液压机控制系统及控制方法
文献发布时间:2023-06-19 19:33:46
技术领域
本发明涉及液压控制技术领域,尤其涉及一种全自动双工位石墨坩埚液压机控制系统及控制方法。
背景技术
目前公知,石墨坩埚成型液压机,填料主要是靠人工去填料,增加人力成本,和填料时间长,脱模时,需要人工去推动成品,费时费力,操作繁琐,且生产效率低下,因此,本发明提出了一种全自动双工位石墨坩埚液压机控制系统及控制方法,通过增加双工位的自动输送及填料的结构可以实现减少人力成本、输送及填料时间短,脱模时不用人工去推动成品,节约时间成本,且操作简便和达到了提高生产效率的有益效果。
发明内容
本发明的目的是为了解决现有技术中存在的问题,而提出的一种全自动双工位石墨坩埚液压机控制系统及控制方法。
为了实现上述目的,本发明采用了如下技术方案:
一种全自动双工位石墨坩埚液压机控制系统,包括有液压设备及系统、电路及液压控制系统,所述液压机设备及系统受控于电路及液压控制系统,所述液压机设备及系统中包括有储料装置或设备系统、输送料装置或设备系统、成型装置或设备系统、成品输送装置或设备系统;所述电路及液压控制系统中包括有在电控柜和液压工作站中设置网络及通讯模块、电路及液压集成模块、送料控制模块、成型控制模块、成品输送控制模块;所述电路及液压集成模块通过网络及通讯模块控制所述送料控制模块、成型控制模块、成品输送控制模块;所述送料控制模块通过网络及通讯模块控制所述输送料装置或设备系统;所述成型控制模块通过网络及通讯模块控制所述成型装置或设备系统;所述成品输送控制模块通过网络及通讯模块控制所述成品输送装置或设备系统;所述储料装置或设备系统中包括有两个相互之间对称设置的储料装置,在每个储料装置上设置有放料口、计量感应装置,所述计量感应装置与所述送料控制模块之间通过网络及通讯模块建立电性连接;所述输送料装置或设备系统与所述储料装置或设备系统下端进行对应,在输送料装置或设备系统中包括有输料管或通道、位于输料管或通道底部进行对应的坩埚下模具,设置于坩埚下模具下方的移动台、位于移动台一侧进行连接的推模缸;所述成型装置或设备系统中包括有柱塞式主缸、上横、下横梁、滑块、坩埚上模具、回程缸;所述成品输送装置或设备系统中包括有推料缸、下顶缸,所述推料缸位于坩埚下模具的上方与所述下顶缸进行配合完成成品输送。
优选地,所述送料控制模块控制所述输料管或通道的开启/关闭,在输料管或通道处设置有感应闸门,所述送料控制模块与所述感应闸门之间通过网络及通讯模块建立电性连接;所述送料控制模块控制所述推模缸的运行动作,在送料控制模块与推模缸之间通过网络及通讯模块建立电性连接。
优选地,所述成型控制模块控制所述柱塞式主缸的运行动作,在成型控制模块与柱塞式主缸之间通过网络及通讯模块建立电性连接;所述成型控制模块控制所述滑块和回程缸的运行工作,在成型控制模块与滑块和成型控制模块与回程缸之间均通过网络及通讯模块建立电性连接。
优选地,所述成品输送控制模块控制所述下顶缸和推料缸的运行动作;在成品输送控制模块与下顶缸和成品输送控制模块与推料缸之间均通过网络及通讯模块建立电性连接。
优选地,在上横梁的两侧分别对称设置有相同数量的支撑桁架,所述储料装置分别固定在支撑桁架的上方;所述柱塞式主缸内置上横梁的中心孔中,柱塞式主缸的下端进行连接滑块,所述坩埚上模具位于所述滑块的底部,所述坩埚下模具与所述坩埚上模具活动对应。
优选地,在所述上横梁、下横梁和滑块对应的四角处设置上下贯穿的通孔,在通孔中分别设置有上下贯穿的立柱通过螺栓分别与所述上横梁、下横梁和滑块进行固定。
优选地,所述坩埚上模具与滑块之间通过螺栓进行连接。
优选地,所述回程缸的数量为两个,两个回程缸的上端分别对应的固定在滑块底部的两侧,两个回程缸的下端分别对应的固定连接下横梁。
优选地,所述移动台的数量为两个,两个移动台分别对称的固定在下横梁的两侧,在两个移动台的下方分别设置有支撑台用于支撑所述移动台,所述支撑台位于下横梁的两侧进行对应固定,在两个移动台之间设置有滑轨与所述下横梁进行连接。
一种全自动双工位石墨坩埚液压控制系统的控制方法,包括有上述中任一项所述的一种全自动双工位石墨坩埚液压控制系统,包括有以下步骤:
S1、电路及液压控制系统控制单工位/双工位下料及输送填料:将石墨粉末料从放料口处放入储料装置中,储料装置中的计量感应装置进行计量并称重,计量感应装置将储料装置中的重量反馈给送料控制模块,重量达到系统中设置的要求后停止放料;送料控制模块控制输料管或通道中的感应闸门进行开启状态,将储料装置中的石墨粉末料输送至输料管或通道下方的坩埚下模具中,输送完毕时,输料管或通道中的感应闸门进行关闭状态;电路及液压集成模块给送料控制模块一个反馈的指令信息;然后送料控制模块再次接收电路及液压集成模块的控制命令后通过网络及通讯模块进行控制推模缸进行推动移动台,将移动台上方将装好石墨粉末料的坩埚下模具推送至坩埚上模具对应的下方位置;
S2、电路及液压控制系统控制单工位/双工位合模及成型:成型控制模块接受电路及液压集成模块的控制命令后通过网络及通讯模块控制上横梁中的柱塞式主缸将滑块进行顶出,使之滑块连接的坩埚上模具与下方对应的坩埚下模具进行合模,完成石墨粉末料的坩埚成型;
S3:电路及液压控制系统控制单工位/双工位输送成品:压制完成后,成品输送控制模块接受电路及液压集成模块的控制命令后通过网络及通讯模块控制回程缸进行顶出,将柱塞式主缸推回原位;成品输送控制模块控制推模缸进行退回至指定位置;成品输送控制模块再进行控制下顶缸进行顶出,将坩埚下模具内的成品顶出后,继续控制推料缸进行推动成品离开工作区域。
与现有的技术相比,本发明优点在于:
通过增加双工位石墨坩埚液压机的自动输送及填料的结构可以实现减少人力成本、输送及填料时间短,脱模时不用人工去推动成品,节约了时间成本,且操作简便和达到了提高生产效率的有益效果。
附图说明
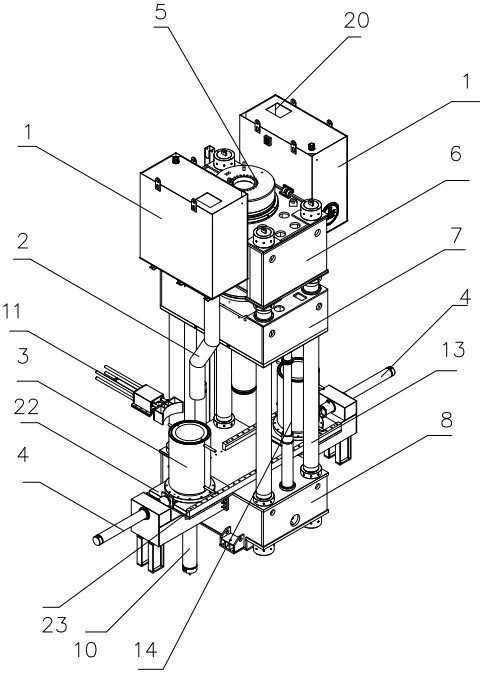
图1为本发明中一种全自动双工位石墨坩埚液压机的立体结构图;
图2为本发明中一种全自动双工位石墨坩埚液压机的正视图;
图3为本发明中一种全自动双工位石墨坩埚液压机的侧视图;
图4为本发明中一种全自动双工位石墨坩埚液压机的俯视图;
图5为本发明中一种全自动双工位石墨坩埚液压机控制系统的控制框架示意图。
图中:1-储料装置;2-输料管或通道;3-坩埚下模具;4-推模缸;5-柱塞式主缸;6-上横梁;7-滑块;8-下横梁;9-坩埚上模具;10-下顶缸;11-推料缸;12-螺栓;13-立柱;14-回程缸;15-网络及通讯模块;16-电路及液压集成模块;17-送料控制模块;18-成型控制模块;19-成品输送控制模块;20-放料口;21-计量感应装置;22-移动台;23-滑轨;24-支撑台。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在本实施例中,一种全自动双工位石墨坩埚液机,包括有液压设备及系统、电路及液压控制系统,所述液压设备及系统受控于电路及液压控制系统,其中,液压设备及系统中包括有储料装置或设备系统、输送料装置或设备系统、成型装置或设备系统、成品输送装置或设备系统;输送料装置或设备系统与所述储料装置或设备系统下端进行对应。
在本实施例中,请参照图1-图4中,在储料装置或设备系统中包括有两个相互之间对称设置的储料装置1,在每个储料装置1上设置有放料口20用于放置石墨粉末料在储料装置1中、有计量感应装置21用于对储料装置1中的石墨粉末料进行计量,其中,计量感应装置21与送料控制模块17之间通过网络及通讯模块15建立电性连接,在储料装置1中的石墨粉末料达到系统中设置的重量后,计量感应装置21通过网络及通讯模块15将把石墨粉末料的重量信息传送给用料控制模块,计量感应装置21还有实施语音提示或警报的功能,提醒工作人员停止放料。
在本实施例中,请继续参照图1-图3中,在输送料装置或设备系统中包括有输料管或通道2、位于输料管或通道2底部进行对应的坩埚下模具3,设置于坩埚下模具3下方的移动台22、位于移动台22一侧进行连接的推模缸4,推模缸4用于推动移动台22及移动台上方的坩埚下模具3,移动台22的数量为两个,两个移动台22分别对称的固定在下横梁8的两侧,在两个移动台22的下方分别设置有支撑台24用于支撑所述移动台22,所述支撑台24位于下横梁8的两侧进行对应固定, 在两个移动台22之间设置有滑轨23与所述下横梁8进行连接,在移动台承载上方的坩埚下模具3移动至所下横梁8上指定的位置时,推模缸4推动的过程中,移动台22在滑轨上滑行的到达下横梁8上指定的位置时。
在本实施例中,请继续参照图1-图4中,成型装置或设备系统中包括有柱塞式主缸5、上横梁6、下横梁8、滑块7、坩埚上模具9、回程缸14;所述成品输送装置或设备系统中包括有推料缸11、下顶缸10,所述推料缸11位于坩埚下模具3的上方与所述下顶缸10进行配合完成成品输送;其中,坩埚上模具9与滑块7之间通过螺栓12进行连接;在上横梁6、下横梁8和滑块7对应的四角处设置上下贯穿的通孔,在通孔中分别设置有上下贯穿的立柱13通过螺栓12分别与上横梁6、下横梁8和滑块7进行固定;上横梁6的两侧分别对称设置有相同数量的支撑桁架,将储料装置1分别固定在支撑桁架的上方;柱塞式主缸5内置在上横梁6的中心孔中,其中,柱塞式主缸5的上下两端凸出中心孔,柱塞式主缸5的下端进行连接滑块7,坩埚上模具9位于所述滑块7的底部,所述坩埚下模具3与所述坩埚上模具9活动对应,活动对应是指坩埚下模具3与坩埚上模具9之间不是固定的进行对应,在坩埚下模具3进行填料时,位于输料管及通道2的位置进行对应,在坩埚下模具3填料完毕时,才会被推送至坩埚上模具9的下方进行对应的完成合模成型。
在本实施例中,请继续参照图1中,回程缸14的数量为两个,两个回程缸14的上端分别对应的固定在滑块7底部的两侧,两个回程缸14的下端分别对应的固定连接下横梁8;回程缸14在本实施例中的作用为:当系统完成坩埚上模具9和坩埚下模具3的合模成型,压制工序完成后,回程缸14进行顶出,将柱塞式主5缸进行退回的作用。
在本实施例中,请参照图5中,所述电路及液压控制系统中包括有在电控柜和液压工作站中设置网络及通讯模块15、电路及液压集成模块16、送料控制模块17、成型控制模块18、成品输送控制模块19;所述电路及液压集成模块16通过网络及通讯模块15控制所述送料控制模块17、成型控制模块18、成品输送控制模块19;所述送料控制模块17通过网络及通讯模块15控制所述输送料装置或设备系统;所述成型控制模块18通过网络及通讯模块15控制所述成型装置或设备系统;所述成品输送控制模块19通过网络及通讯模块15控制所述成品输送装置或设备系统;送料控制模块17控制所述输料管或通道2的开启/关闭,在输料管或通道2处设置有感应闸门,送料控制模块17与所述感应闸门之间通过网络及通讯模块15建立电性连接;送料控制模块17控制所述推模缸4的运行动作,在送料控制模块17与推模缸4之间通过网络及通讯模块15建立电性连接。
在本实施例中,请继续参照图5中,成型控制模块18控制柱塞式主缸5的运行动作,在成型控制模块18与柱塞式主缸5之间通过网络及通讯模块15建立电性连接;所述成型控制模块18控制所述滑块7和回程缸14的运行工作,在成型控制模块18与滑块7和成型控制模块18与回程缸14之间均通过网络及通讯模块(15)建立电性连接;所述成品输送控制模块19控制所述下顶缸10和推料缸11的运行动作;在成品输送控制模块19与下顶缸10和成品输送控制模块19与推料缸11之间均通过网络及通讯模块15建立电性连接。
在本实施例中,一种全自动双工位石墨坩埚液压控制系统的控制方法,包括有以下步骤:
1、将石墨粉末料从放料口20处放入储料装置1中,根据工作需要,可以两个储料装置1同时的进行放料,也可以单独的储料装置1进行放料,储料装置1及储料装置1下方对应的坩埚下模具3对应的工位可同时进行工作,也可交替的单独进行工作,在放料的过程中,储料装置1中的计量感应装置21进行计量并称重,计量感应装置21将储料装置1中的重量反馈给送料控制模块17,重量达到系统中设置的要求后进行提示工作人员停止放料;然后,送料控制模块17控制输料管或通道2中的感应闸门进行开启状态,将储料装置1中的石墨粉末料输送至输料管或通道2下方的坩埚下模具3中进行填料,输送完毕时,输料管或通道2中的感应闸门进行关闭状态;整个填料过程中,通过增加双工位的自动输送及填料的结构实现了减少人力成本、输送及填料时间短的效果,填料完成后,电路及液压集成模块16给送料控制模块17一个反馈的指令信息;然后送料控制模块17再次接收电路及液压集成模块16的控制命令后通过网络及通讯模块15进行控制推模缸4进行推动移动台22,将移动台22上方将装好石墨粉末料的坩埚下模具3推送至坩埚上模具9对应的下方位置;在推动的过程中,使之移动台在滑轨上滑行的到达下横梁8上指定的位置时,使坩埚下模具3与坩埚上模具9进行上下对应。
2、在完成上一步的坩埚下模具3与坩埚上模具9进行上下对应后,成型控制模块18接受电路及液压集成模块16的控制命令后通过网络及通讯模块15控制上横梁6中的柱塞式主缸5将滑块7进行向下顶出,使之滑块7连接的坩埚上模具9与下方对应的坩埚下模具3进行合模,完成石墨粉末料的坩埚成型,在坩埚上模具9和坩埚下模具3中还设置成型油加热器,具体的是成型油加热器中包含油管、模具内腔,在油管中进行过油,模具内腔装有水,油加热水实现模具的加热后对石墨粉末料进行合模成型,此成型油加热器为现有技术不做详细描述。
S3:压制完成后,成品输送控制模块19接受电路及液压集成模块16的控制命令后通过网络及通讯模块15控制回程缸14进行顶出,将柱塞式主缸5推回原位;成品输送控制模块19再控制推模缸4进行退回至指定位置;成品输送控制模块19再进行控制下顶缸10进行顶出,将坩埚下模具3内的成品顶出后,继续控制推料缸11进行推动成品离开工作区域,整个脱模的过程中不用人工去推动成品,通过下顶缸10进行顶出坩埚下模具3中的成品,再通过推料缸11将成品进行推离工作区域,节约了时间成本,且操作简便和达到了提高生产效率的有益效果。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。