一种液压垫同步控制系统及控制方法
文献发布时间:2024-01-17 01:26:37
技术领域
本发明涉及压力机液压垫控制领域内的限位保护装置。
背景技术
目前,随着加工制造业不断进步,出现了各种复杂、精密的零件,液压垫已逐渐成为机械压力机的重要组成部分,对提高拉伸质量,满足复杂工件不同拉延要求,提高设备利用率有重大贡献。
当前,液压垫的控制主要将行程分成多段,然后设定每一段的目标值,然后控制按照上述目标值分别控制各柱塞杆运动,这种控制方法响应慢,不注重各柱塞杆之间的相对位移,非常容易导致各柱塞杆之间的相对误差超出限制范围,从而导致设备频繁停机。
发明内容
本发明的目的是提供一种液压垫同步控制系统及控制方法,实现对液压垫柱塞杆运行速度的控制,保证各柱塞杆之间的位移一致,确保液压垫同步运行。
为实现上述目的,本发明提供了一种液压垫同步控制系统,包括多个液压执行机构,其中一个为主液压执行机构,其余为从液压执行机构,每个液压执行机构上均设置有数据采集机构,数据采集机构与同步控制器信号连接。
与现有技术相比,本发明的有益效果在于,通过数据采集机构将主液压执行机构和从液压执行机构的相关位移数据进行采集后,发送给同步信号控制器进行处理,并最终以主液压执行机构的位移信息为基准,调整从液压执行机构的位移,使得主从液压执行机构之间的位移相对误差不会超出限制范围,从而确保液压垫同步运行。
作为本发明的进一步改进,液压机构包括电机,电机通过旋转轴与液压泵相连,液压泵经高压软管与单向阀相连,单向阀的一端与伺服阀相连,伺服阀的一端与柱塞缸下腔相连,单向阀的另一端通过蓄能器与柱塞缸的上腔相连,柱塞缸内设置柱塞杆。
这样通过电机带动液压泵,配合单向阀和伺服阀来推动柱塞杆的移动,同时蓄能器也能够确保推动柱塞缸的推力恒定,避免推力大小发生较大变化,影响柱塞杆的移动的稳定性。
作为本发明的进一步改进,数据采集机构包括位移编码器,位移编码器设置在柱塞缸的下端,位移编码器与同步控制器相连。
这样通过位移编码器来采集主液压执行机构和从液压执行机构柱塞杆的位移量,将这些数据传输给同步控制器,对其进行计算处理,改变从液压执行机构伺服缸的电压给定值,用来调整主液压执行机构和从液压执行机构柱塞杆的同步。
为了实现上述目的,本发明还提供了一种液压垫同步控制方法,其特征在于:包括以下步骤,步骤1,设置主液压执行机构的伺服阀的电压给定值;
步骤2,采集所有液压执行机构的柱塞杆的位移信号;
步骤3,对采集的位移信号进行分析处理;
步骤4,同步控制器调整从液压执行机构的伺服阀电压给定值,控制各柱塞杆之间的位移一致。
作为本发明的进一步改进,步骤3的具体内容如下,
对采集的位移信号进行分析处理,计算从液压执行机构的伺服阀的电压补偿值,并调整从液压执行机构伺服阀的电压给定值,调整后从液压执行机构伺服阀电压给定值为调整前电压给定值与电压补偿值之和。
作为本发明的进一步改进,步骤3中,从液压执行机构的伺服阀的电压补偿值为:
V
其中,V
调整后从液压执行机构的伺服阀电压给定值为:
V
其中,V
作为本发明的进一步改进,步骤3中,从液压执行机构柱塞杆与主液压执行机构柱塞杆之间的位移差为:
d
其中,d
比例系数为:K=1+d
其中,K为比例系数,d
作为本发明的进一步改进,步骤3中,G的确定方法如下,
以G为150的初始值进行从主液压执行机构和主液压执行机构的跟随验证,当从主液压执行机构与主液压执行机构的位置差在±0.3mm的范围内,增益G不做调整,当位置差大于+0.3mm,缩小增益值G,当位置差小于-0.3mm,增大增益值G。
与现有技术相比,本发明的有益效果在于,统一协调液压垫各柱塞杆的运行速度,保证各柱塞杆位移一致,实现了液压垫的闭环控制,实现了液压垫可靠、安全的连续运行,从而提高了工件拉伸质量,满足复杂工件的拉延要求,进一步提高了经济效益。
附图说明
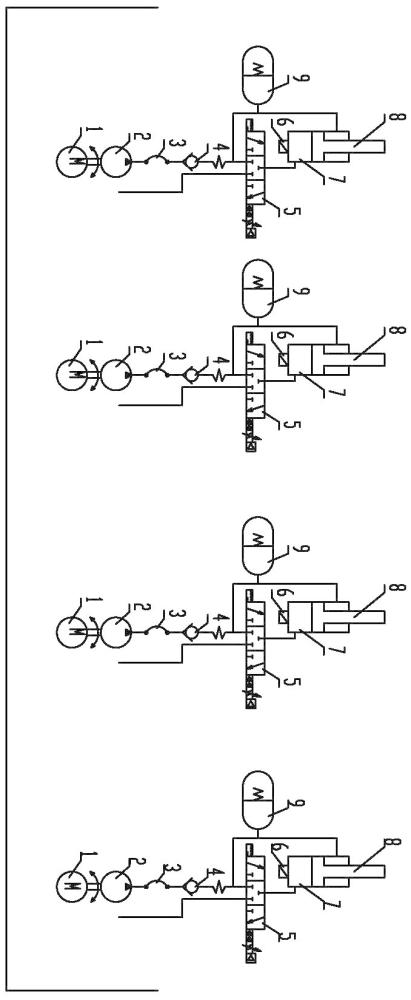
图1为本发明装置示意图。
图2为本发明的系统控制结构框图。
图3为本发明的系统控制流程框图。
其中:1电机,2液压泵,3高压软管,4单向阀,5伺服阀,6位移编码器,7柱塞缸,8柱塞杆,9蓄能器。
具体实施方式
下面结合附图对本发明进一步说明:
如图1所示的一种液压垫同步控制系统,包括多个液压执行机构,其中一个为主液压执行机构,其余为从液压执行机构,每个液压执行机构上均设置有数据采集机构,数据采集机构与同步控制器信号连接。
液压机构包括电机1,电机1通过旋转轴与液压泵2相连,液压泵2经高压软管3与单向阀4相连,单向阀4的一端与伺服阀5相连,伺服阀5的一端与柱塞缸7下腔相连,单向阀4的另一端通过蓄能器9与柱塞缸7的上腔相连,柱塞缸7内设置柱塞杆8。
数据采集机构包括位移编码器6,位移编码器6设置在柱塞缸7的下端,位移编码器6与同步控制器相连。
如图2-3所示的一种液压垫同步控制方法,其特征在于:包括以下步骤,
步骤1,设置主液压执行机构的伺服阀5的电压给定值;
步骤2,采集所有液压执行机构的柱塞杆8的位移信号;
步骤3,对采集的位移信号进行分析处理;
对采集的位移信号进行分析处理,计算从液压执行机构的伺服阀5的电压补偿值,并调整从液压执行机构伺服阀5的电压给定值,调整后从液压执行机构伺服阀5电压给定值为调整前电压给定值与电压补偿值之和。
从液压执行机构的伺服阀5的电压补偿值为:
V
其中,V
调整后从液压执行机构的伺服阀5电压给定值为:
V
其中,V
从液压执行机构柱塞杆8与主液压执行机构柱塞杆8之间的位移差为:
d
其中,d
比例系数为:K=1+d
其中,K为比例系数,d
G的确定方法如下,
以G为150的初始值进行从主液压执行机构和主液压执行机构的跟随验证,当从主液压执行机构与主液压执行机构的位置差在±0.3mm的范围内,增益G不做调整,当位置差大于+0.3mm,缩小增益值G,当位置差小于-0.3mm,增大增益值G。
步骤4,同步控制器调整从液压执行机构的伺服阀5电压给定值,控制各柱塞杆8之间的位移一致。
本发明中,电机1通过旋转轴与液压泵2连接,液压泵2的另一端与高压软管3相连,高压软管3的另一端与单向阀4相连,单向阀4的一端与伺服阀5相连,伺服阀5的一端与柱塞缸7下腔相连,柱塞缸7与柱塞杆8组成执行机构,柱塞缸7的下端设有位移编码器6,单向阀4的另一端通过蓄能器9与柱塞缸7的上腔相连。
液压执行机构分为主液压执行机构和从液压执行机构,其中主液压执行机构设置一个,从液压执行机构设置三个,主液压执行机构和从液压执行机构的组成都相同,这样柱塞杆8为四根,其中右前柱塞杆8为主柱塞杆8,其余三根柱塞杆8为从柱塞杆8,位移编码器6、柱塞缸7和伺服阀5的数量与柱塞杆8的数量一一对应。
位移编码器6采集柱塞杆8位移信号,并将采集的位移信号数据发送给同步控制器,同步控制器对接收到的位移信号进行分析处理后调整从液压执行机构伺服阀5的电压给定值,并将调整后的电压给定值发送给伺服阀5,伺服阀5根据调整后的电压给定值控制从液压执行机构柱塞杆8的运行速度。
具体控制流程如下:
每个位移编码器6采集各自对应的柱塞杆8的位移信号数据,并将这些数据传输给同步控制器。
同步控制器对采集的位移信号进行分析处理,计算从柱塞杆8对应的伺服阀5的电压补偿值,并调整从柱塞杆8伺服阀5的电压给定值,调整后的从柱塞杆8伺服阀5电压给定值为调整前电压给定值与电压补偿值之和;
根据调整后从柱塞杆8伺服阀5电压给定值进行控制,控制各从柱塞杆8与主柱塞杆8的位移一致。
从柱塞杆8伺服阀5的电压补偿值为:
V
其中,V
其中,G为增益的确定方法为:以G为150的初始值进行上述从和主的跟随验证,使从与主的位置差在±0.3mm的范围内,增益G不做调整,当偏差大于+0.3mm,缩小增益值G,当偏差小于-0.3mm,增大增益值G。
调整后的从柱塞杆8伺服阀5电压给定值为:
V
其中,V
从柱塞杆8与主柱塞杆8之间的位移差为:
d
其中,d
比例系数为:
K=1+d
其中,K为比例系数,d
在液压垫启动时,以右前柱塞杆8为主柱塞杆8,其余三根柱塞杆8为从柱塞杆8,右前柱塞杆8伺服阀5的电压给定值为其余柱塞杆8初始伺服阀5电压给定值,即启动时,所有柱塞杆8伺服阀5的电压给定值一致,运行过程中,通过同步控制器的控制和计算从柱塞杆8伺服阀5的电压补偿值,实时调整从柱塞杆8伺服阀5的电压给定值,使得三根从柱塞杆8与主柱塞杆8的位移差保持在±0.3mm范围内。
在液压垫运行过程中,右前柱塞杆8伺服阀5的电压给定值不做调整,在主从同步控制中可以设定主和各从的同步跟随位移,同步误差范围,并进行相应的监控,在同步误差超过设定范围时报警并停止液压垫运行。
本发明中,液压垫的各柱塞杆8分别由各自的伺服阀5进行控制,每个柱塞杆8对应的柱塞缸7底部均设有位移编码器6,通过位移编码器6将各个柱塞杆8的实时位移信号反馈给同步控制器,同步控制器通过控制伺服阀5的电压给定值来实时调节液压垫各柱塞杆8的运行速度,从而控制各柱塞杆8的位移,实现闭环控制。本发明统一协调液压垫各柱塞杆8的运行速度,保证各柱塞杆8运行的位移一致,从而实现了液压垫可靠、安全的连续运行,进一步增强了液压垫的操作性、灵活性和柔性。
本发明统一协调液压垫各柱塞杆8的运行速度,保证各柱塞杆8位移一致,实现了液压垫的闭环控制,实现了液压垫可靠、安全的连续运行,从而提高了工件拉伸质量,满足复杂工件的拉延要求,进一步提高了经济效益。
本发明不局限于上述实施例,在本公开的技术方案的基础上,本领域的技术人员根据所公开的技术内容,不需要创造性的劳动就可以对其中的一些技术特征作出一些替换和变形,这些替换和变形均在本发明的保护范围内。