一种引入期望相位差连续性过渡方程的CPG相位振荡器模型
文献发布时间:2024-01-17 01:27:33
技术领域
本发明涉及CPG相位振荡器模型领域,具体涉及一种引入期望相位差连续性过渡方程的CPG相位振荡器模型。
背景技术
自然界中的生物经过成千上万年的自然选择,进化出强大的运动能力,在效率、能耗控制以及机动性等方面都有非凡的水平。近年来,科学家依照生物的外形、行为机制等研发出各种各样的仿生机器人,并使其在环境监测、搜索救援等领域发挥重要作用。
神经生物学研究表明,生物的节律行为是由中间神经元构成的局部振荡器网络—中枢模式发生器(Central Pattern Generator,CPG)产生和控制的。CPG通过神经元之间的相互抑制实现自激振荡,产生稳定的周期信号,从而实现生物肢体相关部位的节律运动控制。
随着CPG神经生物学的研究不断深入,人工CPG振荡器开始出现。常见的CPG振荡器模型有递归振荡器模型、Hopf振荡器模型、相位振荡器模型等。其中,传统相位振荡器模型主要由相位方程、振幅方程和输出方程构成,该模型因形式简单、控制参数物理意义明确、可独立控制输出幅值与各单元间相位差而被广泛应用于仿生机器人领域。但在实际应用中,传统相位振荡器模型在相位突变时输出过渡不平滑,使得机器人驱动系统的瞬间加速度很大,从而损坏驱动机械结构。综上原因,需要对传统的相位振荡器模型进行改进,实现相位差改变时输出具有平滑性。
发明内容
为了避免现有技术的不足之处,本发明提出一种引入期望相位差连续性过渡方程的相位振荡器模型,从根本上解决了传统相位振荡器模型期望相位差跳变引起的输出过渡不平滑问题,实现多单元CPG相位振荡器网络在期望相位差改变时的输出能够平滑过渡。
技术方案如下:
本发明专利提供一种引入期望相位差连续性过渡方程的相位振荡器模型,所述模型具体包括:期望相位差连续性过渡方程、相位方程、振幅方程和输出方程,具体表示为:
其中,方程1为期望相位差连续性过渡方程,其中
本发明所述的CPG相位振荡器模型构建思路如下:
传统的基于振幅控制的相位振荡器模型主要由相位方程、振幅方程和输出方程构成,具体表示为:
其中,φ
在控制以传统相位振荡器模型为控制器的仿生机器人的实际情况中,往往需要切换机器人的各种模态来执行对应任务,而改变各振荡器单元间的期望相位差是实现机器人多模态切换的重要方法。当期望相位差出现跳变时,相位振荡器模型的输出会出现不平滑的过渡,进而会破坏机器人的驱动机械部件,现以两单元相位振荡器模型为对象分析其输出不平滑的原因:
针对两单元相位振荡器模型,采用泰勒公式,由相位方程推导出单元1的相位迭代方程:
其中,φ
当两单元相位振荡器模型达到稳定同步振动状态时,满足
φ
单元1相位的导数表示为:
当期望相位差发生改变瞬间,两单元相位振荡器模型开始由稳定同步振动状态向相位过渡状态转变,耦合项由零突变为非零,此时单元1的相位迭代方程表示为:
其中,
由于上一迭代时刻满足
那么,期望相位差改变时刻,单元1的相位的导数可近似为:
由此可见,期望相位差改变时刻,由于期望相位差改变值由零突变为非零,引起相位的导数发生突变,从而导致相位产生不光滑。通过减小耦合权重ω
综上,相位导数突变的根本原因是期望相位差的突变,因此,需要采取措施避免
其中,
利用期望相位差连续性过渡方程,可以实现
进一步地,所述相位振荡器模型引入的期望相位差连续性过渡方程具体表示为:
其中,
进一步地,所述改进后的的相位振荡器模型完整表示为:
其中,
进一步地,所述对于相位振荡器模型相位差改变引起输出不平滑突变的分析,分析对象为两单元耦合相位振荡器模型,而针对多个单元相互连接的相位振荡器模型,可以分解成多个两单元相位振荡器模型,从而得到同样的结论。
有益效果
本发明提出的引入期望相位差连续性过渡方程的相位振荡器模型,在保留了传统相位振荡器模型方程结构形式简单、参数工程意义明确以及可以单独控制输出的幅值和相位等优点的基础上,引入期望相位差连续性过渡方程,解决了期望相位差跳变引起的输出过渡不顺滑问题。针对多个单元相互连接的相位振荡器模型,可以分解成多个两单元相位振荡器模型,从而得到同样的结论。在实际对于仿生机器人的运动控制中,采用本发明所述的引入期望相位差连续性过渡方程的相位振荡器模型为控制器,可以使机器鱼驱动系统(舵机等)在期望相位差改变时有平滑的输出过渡,避免了由于输出不平滑导致的驱动系统瞬间加速度过大从而损坏机器鱼的机械系统问题,实现稳定性高、机动性强的仿生控制。
附图说明
图1为传统相位振荡器模型(两单元)的输出图
图2为引入期望相位差连续性过渡方程的相位振荡器模型(两单元)输出图
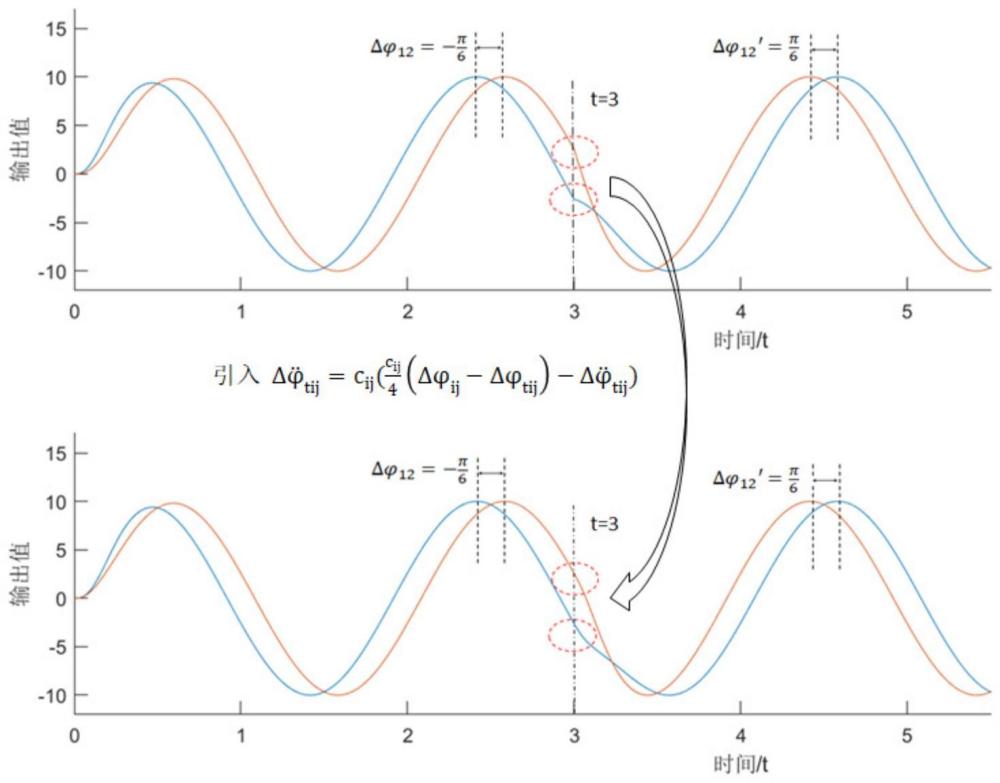
图3为相位振荡器引入期望相位差连续性过渡方程的效果示意图
具体实施方式
下面结合具体实施方式和附图对本发明的技术方案作进一步的介绍。
传统的基于振幅控制的相位振荡器模型主要由相位方程、振幅方程和输出方程构成,具体表示为:
其中,φ
在控制以改传统相位振荡器模型为控制器的仿生机器人的实际情况中,往往需要切换机器人的各种模态来执行对应任务,而变各振荡器单元间的期望相位差是实现机器人多模态切换的重要方法。现设定一个两单元传统相位振荡器模型,ω
由图可见,在期望相位差发生跳变时,输出过渡不平滑,进而会破坏机器人的驱动机械部件,现以两单元相位振荡器模型为对象分析其输出不平滑的原因,并对振荡器模型做出改进:
针对两单元相位振荡器模型,采用泰勒公式,由相位方程推导出单元1的相位迭代方程:
其中,φ
当两单元相位振荡器模型达到稳定同步振动状态时,满足
φ
单元1相位的导数表示为:
当期望相位差发生改变瞬间,两单元相位振荡器模型开始由稳定同步振动状态向相位过渡状态转变,耦合项由零突变为非零,此时单元1的相位迭代方程表示为:
其中,
由于上一迭代时刻满足
那么,期望相位差改变时刻,单元1的相位的导数可近似为:
由此可见,期望相位差改变时刻,由于期望相位差改变值由零突变为非零,引起相位的导数发生突变,从而导致相位产生不光滑。通过减小耦合权重ω
综上,相位导数突变的根本原因是期望相位差的突变,因此,需要采取措施避免
其中,
现设定一个两单元引入期望相位差连续性过渡方程的相位振荡器模型,同样的,ω
由图所示,在期望相位差发生跳变时,所述引入期望相位差连续性过渡方程的相位振荡器模型的输出相位过渡平滑性明显得到改善,在实际情况下,将会避免仿生机器人的驱动机械部件因瞬间加速度过大而发生结构性损坏,进而实现更稳定平顺的姿态控制和模态切换。
以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本领域的技术人员,在不脱离本发明技术方案范围内,当可利用上述揭示的技术内容作出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作任何的简单修改、等同变化与修饰,均仍属于本发明技术方案的范围内。