车辆控制装置以及特性推定方法
文献发布时间:2023-06-19 09:41:38
技术领域
本发明涉及控制车辆的运动的车辆控制装置以及在该车辆控制装置中使用的特性推定方法,尤其涉及推定牵引的拖车的特性并将其用于车辆控制,从而使拖车牵引时的连结车辆的运动更加稳定化的车辆控制装置以及特性推定方法。
背景技术
作为用于使牵引拖车的牵引车(以下,称为“连结车辆”)的姿势稳定化的现有技术,例如,已知有专利文献1。
在该文献的权利要求1中,记载有“一种车辆的质量推定装置,其特征在于,具备:制动压力传感器,其检测制动器的流体压力;车轮旋转传感器,其检测车轮转速;对根据该车轮旋转传感器的输出而得到的车速的时间微分值进行运算,从而对车辆的加速度以及减速度进行运算的机构;以及映射图,其将车辆质量作为参数而预先记录有车辆的减速度相对于制动流体压力的关系,所述车辆的质量推定装置具备如下机构:其在所述时间微分值示出减速状态时,根据相对于由所述制动压力传感器测量出的制动器的流体压力、由所述运算的机构计算出的减速度的特征来推定在所述映射图上对应的质量”。
现有技术文献
专利文献
专利文献1:日本专利特开2000-19002号公报
发明内容
发明要解决的课题
在专利文献1中,推定由牵引车和拖车构成的连结车辆的质量,但未推定对连结车辆的横向运动有影响的重心位置、转动惯量,所以还存在在由于装载的货物的影响而导致拖车的重心位置、转动惯量发生变化的情况下,连结车辆的转弯时的姿势不稳定的情况。
因而,在本发明中,其目的在于,通过推定拖车的重心位置、转动惯量,并将其用于连结车辆的控制,从而能够使连结车辆的转弯时的姿势更加稳定化。
用于解决课题的技术手段
为了达到上述目的,本发明的车辆控制装置搭载于对拖车进行牵引的牵引车,该车辆控制装置具备:转向角控制部,其与由驾驶员进行的转向独立地控制所述牵引车的车轮的转向角;以及拖车特性推定部,其基于由该转向角控制部进行的车轮转向时的所述牵引车的动作来推定所述拖车的特性。
另外,本发明的特性推定方法推定被牵引车牵引的拖车的特性,该特性推定方法包括:转向角控制步骤,与由驾驶员进行的转向独立地控制所述牵引车的车轮的转向角;以及特性推定步骤,基于通过该转向角控制步骤进行的车轮转向时的所述牵引车的动作,推定所述拖车的特性。
发明的效果
根据本发明,通过推定拖车的重心位置、转动惯量,并将其用于连结车辆的控制,从而能够使连结车辆的行驶时的姿势更加稳定化。
附图说明
图1为实施例1的连结车辆的概略图。
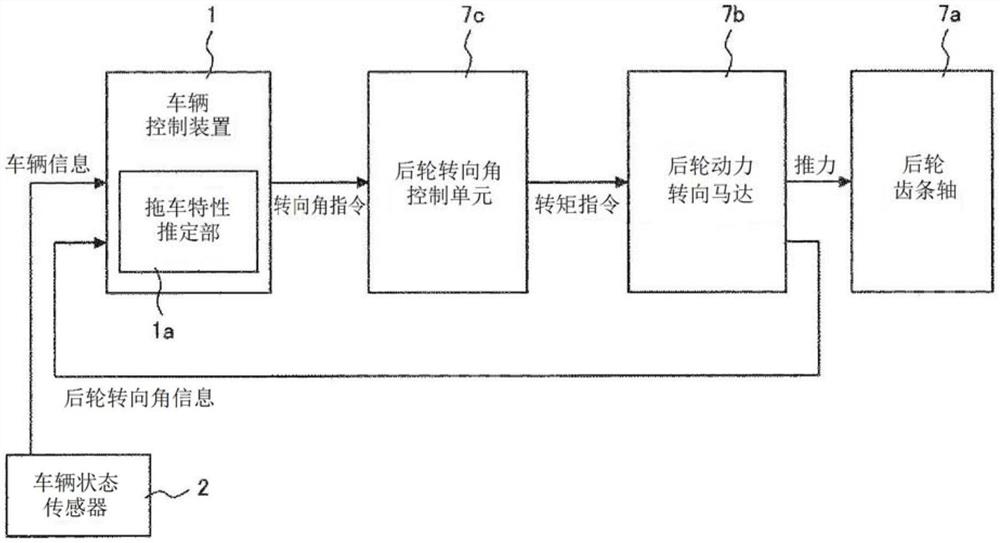
图2为实施例1的连结车辆的主要部分的框图。
图3为示出以0.5Hz的频率使后轮转向角微小地变化的情况下的牵引车偏航率的增益与拖车转动惯量或者重心位置的关系的图。
图4为示出以1Hz的频率使后轮转向角微小地变化的情况下的牵引车偏航率的增益与拖车转动惯量或者重心位置的关系的图。
图5为对使用在实施例1中推定出的拖车特性来控制连结车辆的状况进行说明的框图。
图6为实施例2的连结车辆的主要部分的框图。
具体实施方式
以下,使用附图,对本发明的实施例进行说明。
实施例1
参考图1至图7,对本发明的实施例1进行说明。
图1为示出实施例1的连结车辆100的构成的概略图。如此处所示,本实施例的连结车辆100利用容许以纸面垂直方向为旋转轴的旋转的连接部21将驾驶员乘坐的牵引车10与装载货物的拖车20进行连结。以下,将牵引车10的车轮8的前轮轴与后轮轴的距离设为牵引车车轴距离L,将从连接部21至拖车20的重心位置22为止的距离设为拖车重心距离L
在牵引车10中,除了搭载有本实施例的车辆控制装置1之外,还搭载有方向盘4等与以往牵引车等同的设备。此外,车辆控制装置1为具备CPU等运算装置、半导体存储器等主存储装置、硬盘等辅助存储装置以及通信装置等硬件的计算机。而且,一边参考记录于辅助存储装置的数据库,一边由运算装置执行载入于主存储装置的程序,从而实现后述各功能,但以下,适当地省略这样的公知技术来进行说明。
另外,牵引车10搭载有控制加速度的驱动系统(未图示的引擎、变速器、制动装置等)、以及控制该驱动系统的控制单元(未图示的ECU、ATCU、制动控制装置3等)。另外,牵引车10具备对各控制单元传递指令的车辆控制装置1、获取车辆运动状态信息的车辆状态传感器2、前轮动力转向装置6、后轮动力转向装置7、以及将它们进行连接的通信线。车辆状态传感器2为获取牵引车10的偏航率、前后方向的加速度、左右方向的加速度、各车轮的车轮速度等的传感器,实际上由多个传感器构成。
前轮动力转向装置6具有方向盘4、驾驶员使方向盘4转向时的转向转矩、检测转向角的转向传感器5、经由链路而与前轮连接的前轮齿条轴6a、对前轮齿条轴6a提供推力的前轮动力转向马达6b、根据转向传感器5中的检测值来提供针对前轮动力转向马达6b的指令的前轮转向角控制单元6c。该前轮动力转向装置6根据因驾驶员使方向盘4转向而产生并由转向传感器5检测的转矩(以及/或者转向角),利用前轮动力转向马达6b来产生推力,辅助驾驶员的操作。
同样地,后轮动力转向装置7具有经由链路而与后轮连接的后轮齿条轴7a、用于对后轮齿条轴7a提供推力的后轮动力转向马达7b、以及基于来自车辆控制装置1的指令来提供针对后轮动力转向马达7b的指令的后轮转向角控制单元7c。该后轮动力转向装置7能够与驾驶员的方向盘4的操作独立地、基于车辆控制装置1的指令,利用后轮动力转向马达7b产生推力并使后轮转向。
接下来,使用图2至图4,对本实施例的拖车特性的推定方法进行说明。
图2为在牵引车10的车辆控制装置1推定拖车20的特性(重心位置、转动惯量)时使用的构成的主要部分的框图,示出车辆控制装置1与后轮动力转向装置7的各要素的关系、在车辆控制装置1内配置有拖车特性推定部1a的构成。此外,由拖车特性推定部1a进行的特性推定在连结车辆100以大致恒定速度大致直线前进行驶的情况下被实施,所以在图2中,省略了通过方向盘4的转向而被控制的前轮动力转向装置6的图示。
如此处所示,在推定拖车20的特性的情况下,车辆控制装置1将与由驾驶员进行的转向独立的、规定的转向角指令提供给后轮转向角控制单元7c,后轮转向角控制单元7c将基于该转向角指令的转矩指令提供给后轮动力转向马达7b。从车辆控制装置1提供给后轮转向角控制单元7c的转向角指令例如为特定的频率、振幅的正弦波,由此,牵引车10的后轮的转向角以正弦波状变化。此外,此时,若牵引车10的后轮的转向角的变化大,则会对打算直线前进行驶的驾驶员造成不协调,所以使用如下述那样的转向角指令即可,即:成为以使牵引车10的横向加速度成为无法被人感知的程度的大小(例如0.2m/s
通过基于该转向角指令的转向,在牵引车10中产生偏航旋转运动,另外会产生横向加速度,所以能够由车辆状态传感器2探测偏航率、横向加速度振动。此时,能够相对于以恒定频率变化的后轮转向角δ
该增益、相位与拖车20的转动惯量、重心位置相应地变化,所以在车辆运动控制部1的拖车特性推定部1a中,根据观测到的增益、相位来推定拖车的特性(重心位置、转动惯量等参数)。参考图3、图4,对该方法的详细内容进行说明。
图3为示出在某个条件下的连结车辆100中车辆控制装置1使后轮转向角以0.5Hz的频率微小地变化的情况下的牵引车偏航率的增益与拖车特性的关系的图。
图3的(a)为示出对拖车20的货物的装载位置等进行变更、结果是在维持其它参数的状态下拖车20的转动惯量I
另外,图3的(b)为示出对拖车20的货物的装载位置等进行变更、结果是在维持其它参数的状态下拖车重心距离L
另一方面,图4为示出在与图3相同的条件下的连结车辆100中车辆控制装置1使后轮转向角以1Hz的频率微小地变化的情况下的牵引车偏航率的增益与拖车特性的关系的图。
若比较图4的(a)、(b)和图3的(a)、(b)则可明确,在使后轮转向角以1Hz的频率微小地变化的情况下,观测到与使后轮转向角以0.5Hz的频率微小地变化的情况大幅不同的响应。这是因为一般而言,若转向角的频率不同,则参数发生变化时的增益、相位的响应就会不同。
在存在多个变化的主因的情况下,使牵引车10的后轮以0.5Hz的频率微小地转向时的增益的自基准值起的变化量ΔG
同样地,使牵引车10的后轮转向角以1Hz的频率微小地转向时的增益的自基准值起的变化量ΔG
因而,若假定以1次近似式表示ΔG
[式1]
ΔG
[式2]
ΔG
在此,ΔI
在此,若设为
[式3]
[式4]
[式5]
,则作为
[式6]
Δx=A
而能够求出ΔI
如以上说明那样,在装载于拖车20的货物的重量没有变化、仅变更装载位置的情况下,拖车特性推定部1a能够利用式1至式6来推定拖车20的所期望的特性。然而,在装载于拖车20的货物的重量有变化的情况下,需要使用其它推定方法。
因而,以下,对牵引车偏航率的增益的变化的主因为转动惯量、拖车重心距离以及拖车质量这3个的情况下的、拖车20的特性的推定方法进行说明。
在该情况下,增益的变化量能够推定为以转动惯量变化为起因的变化量、以拖车重心距离变化为起因的变化量以及以拖车质量为起因的变化量之和。因而,按照式7至式9表示3个频率(例如,0.5Hz、1Hz、1.5Hz)下的增益的变化量。
在此,ΔG
[式7]
ΔG
[式8]
ΔG
[式9]
ΔG
在此,若设为
[式10]
[式11]
[式12]
,则作为
[式13]
Δx=A
而能够求出ΔI
以上,通过微小地输入后轮转向角并观察其响应,从而无需附加追加的传感器,就能够廉价且不对驾驶员造成不协调地推定拖车20的转动惯量、质量、重心位置。
此外,虽然在此将变化量假定为一次表达式并解出联立方程,但无需为一次表达式,也可以使用高次表达式、映射图等来推定。另外,虽然示出了以多个数量的频率测定偏航率增益的例子,但也可以根据多个速度下的响应来推定。另外也可以不根据偏航率推定,而根据横向加速度推定、不根据增益推定,而根据相位推定。进一步地,虽然示出了将正弦波划分为多个而输入的方法,但也可以将如多个频率重叠那样的输入提供给后轮转向角,并根据其响应推定拖车20的参数,例如也可以对后轮转向角输入脉冲响应,并根据该响应推定。另外,虽然记载了直线前进行驶时,但也可以设为使前轮转向时。在该情况下,通过减去前轮转向所造成的影响而求出增益,同样能够推定。
接下来,使用图5,对根据以上说明的、拖车20的特性的推定结果来对各致动器提供指令的具体例进行说明。即,当按照来自基于驾驶员操作的前轮转向角控制单元6c的转矩指令而利用前轮动力转向马达6b产生推力时,会在连结车辆100中产生转弯方向的力。此外,虽然在此示出了使用了马达的电动助力转向装置,但也可以为基于驾驶员操作来辅助推力的油压动力转向方式。在车辆运动控制部1中,根据前述的拖车参数推定部1a中的推定结果和车辆运动状态、驾驶员的转向信息,运算向后轮转向角控制单元7c的转向角指令。在该后轮转向角控制单元7c中,根据该指令来产生向后轮动力转向的马达28的转矩指令。
以下示出具体的车辆运动控制部1中的指令的计算方法的一个例子。
若将前轮和后轮的转向角分别设为δ
[式14]
在此,K
将拖车质量、拖车重心距离为基准值的情况下的稳定系数设为K
[式15]
接下来,若将拖车质量、拖车重心距离从基准值开始变化的情况下的稳定系数设为K
[式16]
在此,以使后轮转向角δ
[式17]
即,作为与前轮转向角δ
这样,在车辆控制装置1中,通过利用由拖车特性推定部1a推定出的拖车20的特性、以及式14至式17,从而在拖车20的参数从基准值开始变化时,也能够以与变化前相同的前轮转向角按照相同的转弯半径使连结车辆100转弯,能够实现稳定性提高、操作性提高。即,通过使用拖车20的推定出的转动惯量I
此外,控制的方法不限于此,考虑各种方法。例如,虽然在此示出了操作转向器的例子,但也可以对制动控制装置3提供指令,对左右轮提供不同的制动压力而产生旋转方向的转矩。
这样,在本实施例中,无需附加追加的传感器,就能够进行拖车20的重心位置、转动惯量等参数的推定,通过使用它们来控制连结车辆100,从而能够谋求连结车辆100的行驶时(尤其是转弯时)的稳定性、操作性的提高。
实施例2
接下来,参考图8,对本发明的实施例2进行说明。此外,关于与实施例1的共同点,省略重复说明。
在上述实施例1中,作为前轮动力转向装置6,使用了被直接传递驾驶员的方向盘操作力的装置,但在本实施例中,使用不被传递驾驶员的方向盘操作力的、所谓的线控转向方式的前轮动力转向装置6。
因此,相对于在实施例1的车辆控制装置1中将规定的转向角指令提供给后轮动力转向装置7的情况,在本实施例中,将规定的转向角指令提供给前轮动力转向装置6。在本实施例中,为线控转向方式,所以能够与驾驶员的方向盘操作独立地、对前轮提供转向指令。提供给前轮动力转向装置6的转向角指令例如为特定的频率、振幅的正弦波,由此,前轮的转向角呈正弦波地产生。
此时,以使在牵引车10中产生横向的加速度、但该加速度成为无法被人感知的程度的大小(例如0.2m/s
以下,根据增益或者相位推定拖车20的转动惯量、重心位置、质量的方法按照与实施例1同样的方法求出。另外,基于该推定结果的控制也能够在前轮动力转向装置6中实施。
另外,只要为具备后轮动力转向装置7的装置,就也可以控制后轮。另外,也可以不活用于动力转向装置的控制,而活用于制动、驱动装置的控制。
以上,在本实施例中,能够根据仅前轮的转向来进行参数推定,不需要后轮的动力转向装置,所以能够形成为更简易的系统。
此外,本发明并不限定于上述各实施例,包括各种变形例。例如,上述实施例是为了对本发明易于理解地进行说明而详细地说明的实施例,未必限定于具备所有的构成的例子。另外,能够将某个实施例的构成的一部分置换为其它实施例的构成,另外,还能够对某个实施例的构成施加其它实施例的构成。另外,关于各实施例的构成的一部分,能够进行其它构成的追加、删除以及置换。
符号说明
100连结车辆,1车辆控制装置,2车辆状态传感器,3制动控制装置,4方向盘,5转向传感器,6前轮动力转向装置,6a前轮齿条轴,6b前轮动力转向马达,6c前轮转向角控制单元,7后轮动力转向装置,7a后轮齿条轴,7b后轮动力转向马达,7c后轮转向角控制单元,8车轮,10牵引车,20拖车,21连接部,22拖车重心位置,L牵引车车轴间距离,L
- 车辆控制装置以及特性推定方法
- 车辆状态推定装置、车辆控制装置及车辆状态推定方法