一种扫地机器人避障防卡装置
文献发布时间:2023-06-19 19:18:24
技术领域
本发明涉及扫地机器人技术领域,更具体地说,本发明涉及一种扫地机器人避障防卡装置。
背景技术
现今随着社会的不断进步,人们对于生活环境的要求也越来越高,故而在这种需求下,智能家居的理念也就越来越深入人心,在智能家居中比较重要的一部分就是家电的智能化和人性化,智能扫地机器人就是其中一个典型的代表,但是现有的扫地机器人由于是通过电机带动主动轮前进,故而一般的扫地机器人的转向能力会较差,如果扫地机器人被较大的障碍物阻挡或者被障碍物卡住主动轮时,其很有可能被卡在原地,而且往往在这种状况下电机会一直处于运行状态,这样电机的超负荷运转极有可能会造成电机的损毁,进而使得扫地机器人不能正常运行。
发明内容
为实现上述目的,本发明提供如下技术方案:一种扫地机器人避障防卡装置,包括位于扫地机器人底部的避障环,在避障环底部均匀排布有多个避障组件,所述避障组件在避障环上可转动,在避障环外侧安装有对避障组件的上端进行防护的防护罩,在避障环内侧安装有与避障组件传动连接的传动环件,所述传动环件在避障环内侧转动,在避障环上方设有交叉设置的定位架,定位架端部固定在避障环的顶部,在位于传动环件内侧的定位架上安装有进行避障和顶起的支撑机构。
在一个优选地实施方式中,所述避障环呈圆环状设置,避障环的外径与扫地机器人的外径相同,在所述避障环上均匀开设有多个安装孔,避障环通过螺钉和安装孔安装在扫地机器人的底部。
在一个优选地实施方式中,所述避障组件包括嵌设在避障环底部的轴承,在轴承内插接有转动的转轴,在转轴的外部套设有连接齿轮,在转轴底端安装有调节轮,所述调节轮的直径大于连接齿轮的直径。
在一个优选地实施方式中,所述防护罩向下延伸至调节轮的上方,所述连接齿轮位于防护罩的内侧,所述调节轮的边缘处延伸至防护罩的外侧。
在一个优选地实施方式中,所述传动环件包括位于避障环内侧的转环,在与转环外壁相贴合的避障环内壁上设有向外突出的环槽,所述转环外壁上安装有延伸至环槽内的限位环。
在一个优选地实施方式中,所述转环底端向避障环底部延伸一段距离,在转环底端安装有与连接齿轮啮合连接的外环齿牙,在转环顶端安装有向内侧延伸的内环齿牙。
在一个优选地实施方式中,所述定位架呈“十”字交叉设置,所述支撑机构包括固定在定位架底部的微型伺服推杆,所述微型伺服推杆输出轴向下延伸,在微型伺服推杆底端安装有半球状的压块。
本发明的技术效果和优点:
通过采用外置调节轮和可以顶起的支撑机构,提升了扫地机器人的转向能力和越障能力,使其在越障的过程中不会被障碍物阻挡,能够转向或升起越障,即使主动轮被卡住时,调节轮也可以转动正常实现转向。
附图说明
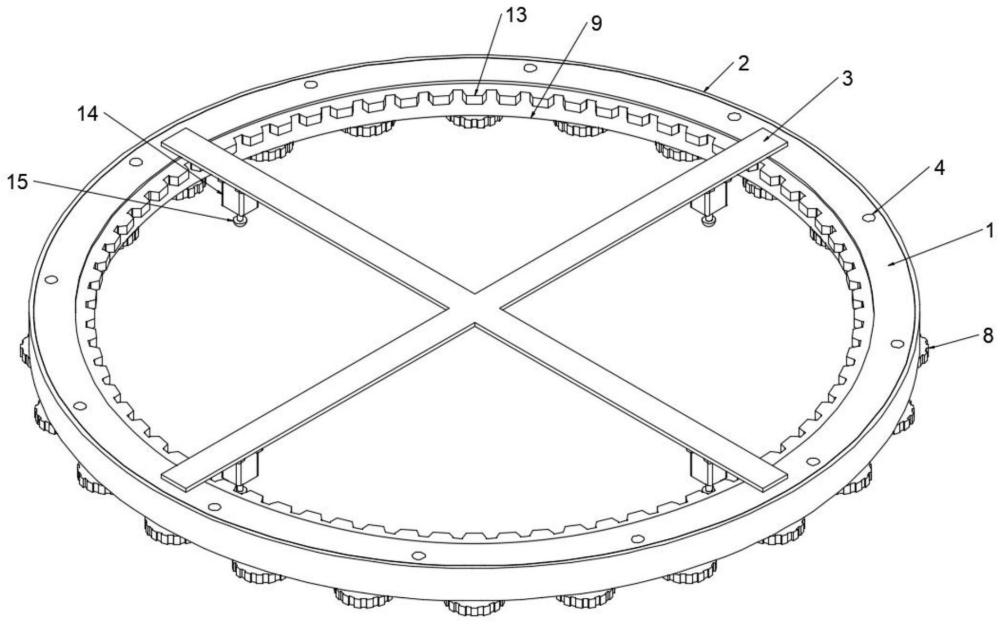
图1为本发明的整体结构示意图。
图2为本发明的底部结构示意图。
图3为本发明的纵向剖面结构示意图。
附图标记为:1避障环、2防护罩、3定位架、4安装孔、5轴承、6转轴、7连接齿轮、8调节轮、9转环、10环槽、11限位环、12外环齿牙、13内环齿牙、14微型伺服推杆、15压块。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明提供了如图1-3所示的一种扫地机器人避障防卡装置,包括位于扫地机器人底部的避障环1,在避障环1底部均匀排布有多个避障组件,所述避障组件在避障环1上可转动,在避障环1外侧安装有对避障组件的上端进行防护的防护罩2,在避障环1内侧安装有与避障组件传动连接的传动环件,所述传动环件在避障环1内侧转动,在避障环1上方设有交叉设置的定位架3,定位架3端部固定在避障环1的顶部,在位于传动环件内侧的定位架3上安装有进行避障和顶起的支撑机构。
避障组件在避障环1上转动,在扫地机器人遇到障碍时,避障组件会贴合在障碍上,通过传动环件带动在避障环1上转动,产生一个向侧面的拉力,将扫地机器人向一侧转移偏离,使其越开障碍。
所述避障环1呈圆环状设置,避障环1的外径与扫地机器人的外径相同,在所述避障环1上均匀开设有多个安装孔4,避障环1通过螺钉和安装孔4安装在扫地机器人的底部。
进一步的,所述避障组件包括嵌设在避障环1底部的轴承5,在轴承5内插接有转动的转轴6,在转轴6的外部套设有连接齿轮7,在转轴6底端安装有调节轮8,所述调节轮8的直径大于连接齿轮7的直径。
调节轮8可以通过转轴6和轴承5在避障环1上转动,而避障组件的为多个,因此多个调节轮8均匀分布在避障环1的底部。
进一步的,所述防护罩2向下延伸至调节轮8的上方,所述连接齿轮7位于防护罩2的内侧,所述调节轮8的边缘处延伸至防护罩2的外侧。
防护罩2位于连接齿轮7的外侧,不与连接齿轮7接触,用于对转动的连接齿轮7进行防护,避免外部的障碍与连接齿轮7贴合造成卡塞,而调节轮8的边缘处延伸至防护罩2的外侧,在扫地机器人移动的过程中遇到障碍时,会是调节轮8的先与障碍接触,在调节轮8被驱动并通过转轴6和轴承5转动时,便会产生向转动方向相反的力,将扫地机器人向一侧拉动,越开障碍。
所述传动环件包括位于避障环1内侧的转环9,在与转环9外壁相贴合的避障环1内壁上设有向外突出的环槽10,所述转环9外壁上安装有延伸至环槽10内的限位环11。
转环9用于将扫地机器人的驱动结构与避障环1上的调节轮8和连接齿轮7传动连接,而环槽10和限位环11用于对转环9的安装进行固定和限位,防止其脱落,使其在避障环1内侧转动。
所述转环9底端向避障环1底部延伸一段距离,在转环9底端安装有与连接齿轮7啮合连接的外环齿牙12,在转环9顶端安装有向内侧延伸的内环齿牙13。
内环齿牙13与扫地机器人的驱动结构连接,通过其带动整个转环9在避障环1的内侧转动,而转环9底部的外环齿牙12会与转轴6上的连接齿轮7啮合,在转环9转动时,带动转轴6、连接齿轮7和调节轮8在避障环1上的轴承5内转动,实现越障作业。
所述定位架3呈“十”字交叉设置,所述支撑机构包括固定在定位架3底部的微型伺服推杆14,所述微型伺服推杆14输出轴向下延伸,在微型伺服推杆14底端安装有半球状的压块15;
进一步的,转环9可以顺时针转动,也可以逆时针转动,使得调节轮8在工作过程中,可以将扫地机器人向障碍的两侧拉动进行越障;
其中,会存在障碍旁边空间较小而转向无法越过时,可以控制微型伺服推杆14升起,将整个扫地机器人支起,同时调节轮8还会进行转向调节,使得扫地机器人直接越过障碍,或者在支起后再向一侧转向完成越障,提升了设备的越障能力,避免扫地机器人在狭隘的障碍道口处出现卡塞的现象。
通过采用外置调节轮8和可以顶起的支撑机构,提升了扫地机器人的转向能力和越障能力,使其在越障的过程中不会被障碍物阻挡,能够转向或升起越障,即使主动轮被卡住时,调节轮8也可以转动正常实现转向。
最后应说明的几点是:首先,在本申请的描述中,需要说明的是,除非另有规定和限定,术语“安装”、“相连”、“连接”应做广义理解,可以是机械连接或电连接,也可以是两个元件内部的连通,可以是直接相连,“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变,则相对位置关系可能发生改变;
其次:本发明公开实施例附图中,只涉及到与本公开实施例涉及到的结构,其他结构可参考通常设计,在不冲突情况下,本发明同一实施例及不同实施例可以相互组合;
最后:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种视觉扫地机器人及其避障方法
- 一种机器人避障控制方法、装置、存储介质及机器人
- 一种扫地机器人的避障装置及避障方法
- 一种检测模组、避障模组、防卡模组、地检模组及机器人