输送系统、可移动元件、控制装置、控制方法以及物品的制造方法
文献发布时间:2023-06-19 11:17:41
技术领域
本公开涉及输送系统、可移动元件、控制装置、控制方法以及物品的制造方法。
背景技术
通常例如在用于工业产品组装的生产线中以及在半导体曝光装置中要使用输送系统。尤其是,生产线中的输送系统在自动化生产线中的多个工位之间或者在工厂中的多条生产线之间输送诸如零件的工件。输送系统还用作加工装置中的输送装置。其中,已经讨论过使用可移动磁体型线性马达的输送系统。
使用线性马达的输送系统包括涉及机械接触的引导装置(例如线性引导件)。使用引导装置(例如线性引导件)的输送系统具有由于来自线性引导件的滑动部分的污染物(例如导轨和轴承的磨损碎片、润滑油和挥发性润滑剂)而导致的生产率降低的问题。还存在另外的由于高速输送期间滑动部分的摩擦增加而导致的线性引导件的寿命缩短的问题。
日本专利特开第2005-079368号公报讨论了一种磁悬浮输送装置,所述磁悬浮输送装置实现了输送托盘的无接触式输送。根据日本专利特开第2005-079368号公报,用于在输送方向(以下称为“X方向”)上进行控制以及在悬浮方向(以下称为“Z方向”)上进行控制的两列永磁体沿着输送托盘的输送方向布置在腔室下方。此外,在垂直于输送方向的水平方向(以下称为“Y方向”)上布置一列永磁体。在输送托盘上,与永磁体相对应地布置了三组线圈。
发明内容
根据本公开的第一方面,一种输送系统包括:可移动元件,所述可移动元件包括第一线圈群和第二线圈群,其中所述第一线圈群包括沿着第一方向布置的多个第一线圈,并且所述第二线圈群包括沿着与所述第一方向交叉的第二方向布置的多个第二线圈;以及包括多个磁性体的定子,所述多个磁性体沿着所述第一方向布置成使得所述多个磁性体能够面对所述第一线圈群和所述第二线圈,其中,在电流施加到所述第一线圈群或所述第二线圈群的情况下,在所述可移动元件和所述多个磁性体之间生成力;并且其中所述可移动元件能够沿着所述多个磁性体在所述第一方向上移动,同时所述可移动元件的取向由生成的力控制。
根据本公开的第二方面,一种可移动元件包括:上表面;侧表面;以及下表面,其中所述上表面包括第一线圈群和第二线圈群,并且其中所述第一线圈群包括沿着第一方向布置的多个第一线圈,所述第二线圈群包括沿着与所述第一方向交叉的方向布置的多个第二线圈。
根据本公开的第三方面,一种控制装置沿着磁性体移动可移动元件,其中所述可移动元件包括沿着第一方向布置的第一线圈群和沿着与所述第一方向交叉的方向布置的第二线圈群,所述磁性体沿着所述第一方向布置以面对所述第一线圈群和所述第二线圈群,所述控制装置包括:输送控制器,所述输送控制器配置成通过控制施加到所述第一线圈群的电流来控制所述可移动元件在所述第一方向上的输送;以及取向控制器,所述取向控制器配置成通过控制施加到所述第一线圈群或所述第二线圈群的电流来控制所述可移动元件的取向。
根据本公开的第四方面,一种控制方法沿着磁性体移动可移动元件,其中所述可移动元件包括沿着第一方向布置的第一线圈群和沿着与所述第一方向交叉的方向布置的第二线圈群,所述磁性体沿着所述第一方向布置以面对所述第一线圈群和所述第二线圈群,所述控制方法包括:通过控制施加到所述第一线圈群的电流来控制所述可移动元件在所述第一方向上的输送;以及通过控制施加到所述第一线圈群或所述第二线圈群的电流来控制所述可移动元件的取向。
根据本公开的第五方面,一种使用根据所述第一方面限定的输送系统来制造物品的方法,所述方法包括在使用可移动元件输送工件的同时加工所述工件。
通过参照附图对示例性实施例的以下描述,本公开的更多特征将变得显而易见。
附图说明
图1A是示出根据本公开的第一示例性实施例的输送系统的可移动元件的示意图。图1B是示出根据本公开的第一示例性实施例的输送系统的定子的示意图。
图2是示出根据本公开的第一示例性实施例的输送系统的整体配置的示意图。
图3A和3B是示出根据本公开的第一示例性实施例的输送系统中的线圈群的示意图。图3C示出了通过将电流施加到根据本公开的第一示例性实施例的输送系统中的线圈群而生成的力的大小。
图4A是示出根据本公开的第一示例性实施例的控制输送系统的控制系统的示意图。图4B是示出根据本公开的第二示例性实施例的控制输送系统的控制系统的示意图。
图5示出了根据本公开的第一示例性实施例的输送系统中的可移动元件控制器。
图6示出了根据本公开的第一示例性实施例的输送系统中的线圈的作用。
具体实施方式
本公开涉及输送系统,所述输送系统以无物理接触的方式输送可移动元件,同时控制可移动元件的取向并且不需要系统配置的大型化,本公开还涉及可移动元件、控制装置、控制方法以及物品的制造方法。
在日本专利特开第2005-079368号公报中讨论的装置包括至少三列线圈阵列,并且具有大而复杂的结构。如果为了减小结构尺寸而将X用线圈和Y用线圈彼此靠近布置,则例如会由于可移动元件朝向Y移位而使本应面对Y用永磁体的Y用线圈变成面对X用线圈,因此可移动元件的取向控制变得困难。
[第一示例性实施例]
以下将参照图1A和1B至图6描述本公开的第一示例性实施例。
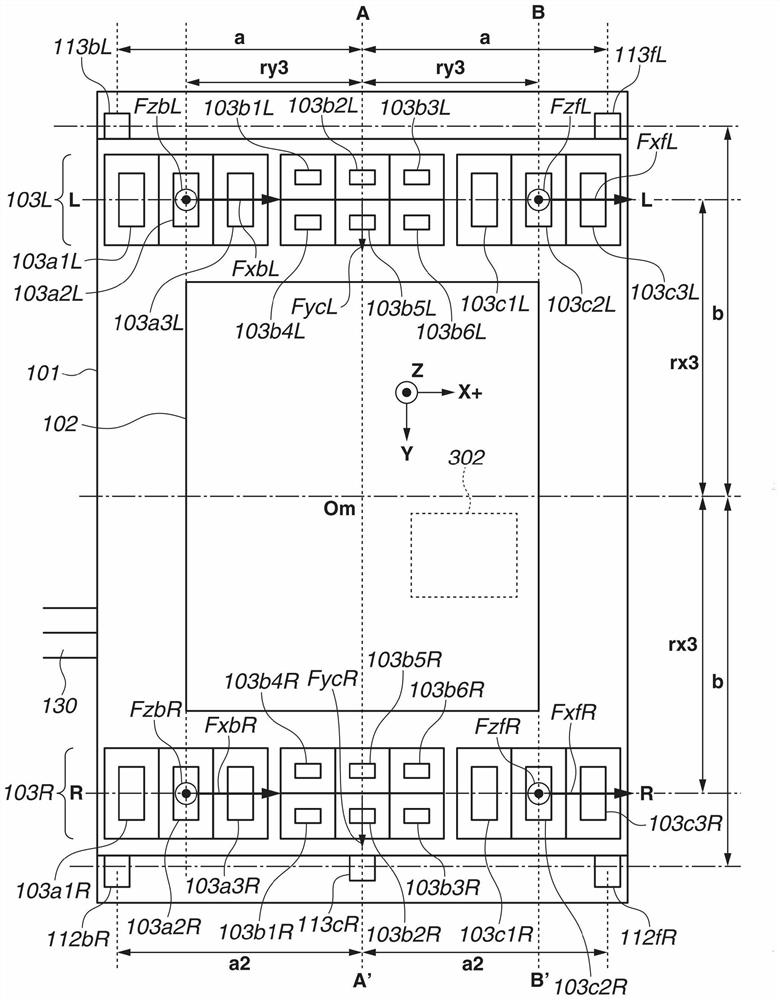
首先,下面将参照图1A和1B描述根据本示例性实施例的输送系统1的整体配置。图1A和1B是示出根据本示例性实施例的可移动元件101和定子201的示意图。图1A示出了可移动元件101的取出的主要部分,图1B示出了定子201的取出的主要部分。此外,图1A是示出在Z方向上观察的可移动元件101的视图,图1B是示出在Y方向上观察的定子201的视图。Z方向和Y方向将在下文进行描述。
如图1A和1B所示,根据本示例性实施例的输送系统1包括可移动元件101和定子201。可移动元件101配置为台车、滑块或滑架。定子201配置为输送路径。输送系统1是包括可移动线圈型线性马达的输送系统。此外,输送系统1是磁悬浮型输送系统,其不包括诸如线性引导件的引导件,并且以不与可移动元件101物理接触的方式在定子201上输送可移动元件101。
例如,输送系统1使用定子201输送可移动元件101,并且将可移动元件101上的工件102输送到用于加工工件102的加工装置。尽管图1A和1B示出了相对于定子201的一个可移动元件101,但是本示例性实施例不限于这些图示。输送系统1可以在定子201上输送多个可移动元件101。
本文使用的坐标轴和方向按如下所述进行定义。首先,沿着水平方向(即可移动元件101的输送方向)定义X轴,并且将可移动元件101的输送方向定义为“X方向”。在本说明书中,X方向有时被称为“第一方向”。沿着竖直方向(即垂直于X方向的方向)定义Z轴,并且将竖直方向定义为“Z方向”。沿着垂直于X方向和Z方向的方向定义Y轴,并且将垂直于X方向和Z方向的方向定义为“Y方向”。围绕X轴、Y轴和X轴的旋转分别由Wx、Wy和Wz表示。符号“*”将用作乘法符号。可移动元件101的中心将被称为“原点O”,并且从原点O开始的正Y侧和负Y侧将分别被称为“R侧”和“L侧”。可移动元件101的输送方向不一定总是水平方向,并且在输送方向不是水平方向的情况下,也可以将输送方向定义为X方向,并且可以如上所述地定义Y方向和Z方向。
接下来,下面将参照图1A和图2描述作为根据本示例性实施例的输送系统1的输送目标的可移动元件101。图2是示出根据本示例性实施例的输送系统1的整体结构的示意图。图2示出了在X方向上观察的可移动元件101和定子201。在图2中,L侧是沿着图1A中指定的线A-A’的横截面A,并且R侧是沿着图1A中指定的线B-B’的横截面B。
如图1A和图2所示,可移动元件101具有上表面101a、侧表面101b和下表面101c。此外,可移动元件101包括线圈阵列103R和103L,每个线圈阵列包括多个线圈103。尽管在本示例性实施例中描述了可移动元件101设置有两个线圈阵列,包括在可移动元件101的上表面101a的L侧的一个线圈阵列和在上表面101a的R侧的另一个线圈阵列,但是可移动元件101不限于该布置并且可以包括一个线圈阵列或者三个或更多个线圈阵列。在本说明书中,可移动元件101的上表面101a在平行于X方向(即输送方向)且垂直于与X方向成直角的竖直方向(Z方向)的表面中面向上(面向正Z方向的表面)。可移动元件101的下表面101c在平行于X方向(即输送方向)且垂直于与X方向成直角的竖直方向(Z方向)的表面中面向下(面向负Z方向的表面)。可移动元件101的侧表面101b在平行于X方向(即输送方向)且平行于与X方向成直角的竖直方向(Z方向)的表面中面向定子201。
如图1A所示,线圈103a1R至103a3R、103b1R至103b6R、以及103c1R至103c3R在可移动元件101的上表面101a的R侧。线圈103a1R至103a3R以及103c1R至103c3R的每个中心在向R侧的Y方向上与作为可移动元件101的中心的原点Om相距的距离为rx3。线圈103b1R和103b4R之间、线圈103b2R和103b5R之间、以及线圈103b3R和103b6R之间的每个中点在向R侧的Y方向上与作为可移动元件101的中心的原点Om相距的距离为rx3。
线圈103a1L至103a3L、103b1L至103b6L、以及103c1L至103c3L在可移动元件101的上表面101a的L侧。线圈103a1L至103a3L以及103c1L至103c3L的每个中心在向L侧的Y方向上与作为可移动元件101的中心的原点Om相距的距离为rx3。线圈103b1L和103b4L之间、线圈103b2L和103b5L之间、以及线圈103b3L和103b6L之间的每个中点在向L侧的Y方向上与作为可移动元件101的中心的原点Om相距的距离为rx3。
在R侧和L侧的布置有线圈103的区域之间的可移动元件101的上表面101a的区域是放置待输送的工件102的区域。
线圈阵列103R和103L沿着X方向布置在可移动元件101的上表面101a中。具体地,线圈阵列103R布置在可移动元件101的上表面101a的R侧。线圈阵列103L布置在可移动元件101的上表面101a的L侧。在下文中,除非需要加以区别,否则可移动元件101的每个线圈将被称为“线圈103”。在不需要在R侧和L侧之间加以区别、但是需要或者至少应当分别标注每个线圈103的情况下,所使用的标识符使用小写字母和数字来分别标注线圈103且在附图标记的末尾没有字母“R”或“L”。在图1A的情况下,线圈103被分别标注为“线圈103a1至103a3”,“线圈103b1至103b6”或“线圈103c1至103c3”。
线圈103a1R在X方向上布置在可移动元件101的上表面101a的R侧的一端,并且线圈103c3R在X方向上布置在另一端。线圈103b1R至103b6R在可移动元件101的上表面101a的R侧布置在线圈103a3R和103c1R之间。例如,线圈103a1R至103a3R在沿着X方向的线R-R上以在X方向上相等的距离排列。此外,例如,线圈103c1R至103c3R在沿着X方向的线R-R上以在X方向上相等的距离排列。线圈103b1R至103b3R以及线圈103b4R至103b6R在隔着线R-R的相对侧布置成两列并且沿着X方向以相等的距离布置。
线圈103a1L在X方向上布置在可移动元件101的上表面101a的L侧的一端,并且线圈103c3L在X方向上布置在另一端。线圈103b1L至103b6L在可移动元件101的上表面101a的L侧布置在线圈103a3L和103c1L之间。例如,线圈103a1L至103a3L在沿着X方向的线L-L上以在X方向上相等的距离排列。例如,线圈103c1L至103c3L在沿着X方向的线L-L上以在X方向上相等的距离排列。线圈103b1L至103b3L以及线圈103b4L至103b6L在隔着线L-L的相对侧布置成两列并且沿着X方向以相等的距离布置。
线圈103a1L至103a3L以及103c1L至103c3L在X方向上分别布置在与线圈103a1R至103a3R以及103c1R至103c3R对应的位置处。线圈103b1R和103b4R在X方向上分别布置在与线圈103b1L和103b4L对应的位置处。线圈103b2R和103b5R在X方向上分别布置在与线圈103b2L和103b5L对应的位置处。线圈103b3R和103b6R在X方向上分别布置在与线圈103b3L和103b6L对应的位置处。
线圈103a2R的中心和线圈103c2R的中心从在Y方向上从原点Om(可移动元件101的中心)延伸的线与线R-R成直角相交的位置分别在X方向上朝着可移动元件101的一侧和另一侧离开距离ry3。线圈103a2L的中心和线圈103c2L的中心从在Y方向上从原点Om延伸的线与线L-L成直角相交的位置分别在X方向上朝着可移动元件101的一侧和另一侧离开距离ry3。线圈103a1至103a3的中心以及线圈103c1至103c3的中心从在Y方向上从相应的中心延伸的线与在X方向上从原点Om延伸的线成直角相交的位置离开距离rx3。尽管在上面作为示例描述了线圈103b布置成使得在连接线圈103b1至103b3的中心的线与连接线圈103b4至103b6的中心的线之间的中间线在Y方向上从原点O离开距离rx3,但是线圈103b不限于该示例。
三组两个线圈103(即,线圈103b1R和103b4R、103b2R和103b5R、以及103b3R和103b6R)被包括在线圈群中,并且每组的两个线圈103沿着Y方向布置。三组两个线圈103(即,线圈103b1L和103b4L、103b2L和103b5L、以及103b3L和103b6L)被包括在线圈群中,并且每组的两个线圈103沿着Y方向布置。沿着Y方向布置的线圈103b的数量不限于两个。此外,线圈103b的布置方向不必总是垂直于作为输送方向的X方向,并且也可以是与X方向交叉的任何方向。
线圈103aR是沿着X方向布置的三个线圈103的群,并且线圈103cR、线圈103aL和线圈103cL也是如此。沿着X方向布置的线圈103a的数量不限于三个,并且可以是大于一个的任何数量,并且沿着X方向布置的线圈103c的数量不限于三个,并且可以是大于一个的任何数量。
在本示例性实施例中,沿着X方向布置的线圈103的群有时被称为“第一线圈群”。沿着与X方向交叉的方向布置的多组两个线圈103的群有时被称为“第二线圈群”。具体地,根据本示例性实施例的第二线圈群是多组线圈103b1L和103b4L、103b2L和103b5L以及103b3L和103b6L的群以及多组线圈103b1R和103b4R、103b2R和103b5R以及103b3R和103b6R的群。在本示例性实施例中,线圈103b1L和103b4L、线圈103b2L和103b5L以及线圈103b3L和103b6L有时分别被称为“103b1·4L”、“103b2·5L”和“103b3·6L”。此外,线圈103b1R和103b4R、线圈103b2R和103b5R以及线圈103b3R和103b6R有时分别被称为“103b1·4R”、“103b2·5R”和“103b3·6R”。
每个线圈103可以是有芯线圈或无芯线圈。在本示例性实施例中,每个线圈103是在磁路中具有磁铁芯(芯)的线圈。因此,在线圈103的芯和永磁体203之间生成强磁吸引力,并且这有助于可移动元件101的悬浮。有芯线圈103尤其适合于可移动元件101或放置在可移动元件101上的工件102具有大质量的情况。线圈103的芯可以是在芯和至少一个永磁体203之间生成磁吸引力的任何芯。理想地,线圈103的芯布置成面对多个永磁体203。
可移动元件101包括在隔着可移动元件101的上表面101a的中心轴线的R侧和L侧沿着X轴作为对称轴线对称布置的多个线圈103。例如,以三个线圈103为单元来控制多个线圈103的电流。对线圈103施加电流控制的单元将被称为“线圈单元”。当电流施加到多个线圈103时,电磁力在多个线圈103和定子201的多个永磁体203之间生成并作用在可移动元件101上。具有多个线圈103的可移动元件101通过定子201的多个永磁体203所接收的电磁力进行移动,同时沿六个轴控制可移动元件101的取向。
可移动元件101能够沿着在X方向上布置成两列的多个永磁体203在X方向上移动。可移动元件101与作为输送目标的工件102一起被输送,所述工件102由可移动元件101的上表面101a或下表面101c保持。例如,可移动元件101可以包括保持工件102的保持机构(譬如工件保持器)。
接下来,下文将参照图1B和图2描述根据本示例性实施例的输送系统1的定子201。图1B示出了在Z方向上观察的永磁体203。
定子201包括沿着作为可移动元件101的输送方向的X方向布置成两列的多个永磁体203。多个永磁体203布置在定子201上以面对可移动元件101的上表面101a的线圈103。定子201在作为可移动元件101的输送方向的X方向上延伸,并且形成可移动元件101的输送路径。多个永磁体203布置在定子201上且面朝定子201的下部,并且在永磁体203和定子201之间设有磁轭221。磁轭221由诸如铁的高磁导率材料制成。多个永磁体203沿着可移动元件101的输送方向以预定间隔布置并且被交替地磁化。定子201在X方向上的基准位置将用Of表示。
要在定子201上输送的可移动元件101包括编码器111、Y传感器112、Z传感器113、可移动元件控制器302和线缆130。定子201包括标尺211、Y目标212和Z目标213。编码器111例如布置在可移动元件101的底部上。标尺211沿着X方向布置在定子201上以面对可移动元件101的编码器111。编码器111检测标尺211的图案,并且检测可移动元件101在X方向上距标尺211的基准位置的距离。Y目标212例如沿着X方向布置以面对布置在可移动元件101的侧表面101b上的Y传感器112。Y传感器112测量Y传感器112和Y目标212之间在Y方向上的距离。Z目标213例如沿着X方向布置以面对布置在可移动元件101的底部上的Z传感器113。Z传感器113测量Z传感器113和Z目标213之间在Z方向上的距离。理想地,布置三个Z传感器113(113bL、113fL、113cR),即,两个布置在L侧且一个布置在R侧。编码器111、Y传感器112、Z传感器113、线圈103和线缆130连接到可移动元件控制器302。线缆130例如连接到定子201的集成控制器301(将在下文对其进行描述)。此外,线缆130理想地由诸如
多个永磁体203沿着X方向布置成两列并且布置在定子201中以面对位于可移动元件101的上表面101a的R侧和L侧的线圈103。在R侧的一列中的多个永磁体203沿着X方向布置以面对可移动元件101的R侧的线圈103aR、103bR和103cR。此外,在L侧的另一列中的多个永磁体203沿着X方向布置以面对可移动元件101的L侧的线圈103aL、103bL和103cL。
引导构件108布置在可移动元件101上。理想地,引导构件108在可移动元件101的侧表面101b上沿着X方向布置。此外,Z辊262和Y辊261布置在定子201上。引导构件108理想地具有例如C形或U形的横截面。利用C形或U形的横截面,引导构件108可以围绕Z辊262和Y辊261。
多个Z辊262和Y辊261在定子201上沿着输送方向(第一方向(X方向))布置。尽管在图2中作为示例Z辊262布置在R侧且Y辊261布置在L侧,但是Z辊262和Y辊261可以分别布置在R侧和L侧。
利用引导构件108来管控可移动元件101的移动量。具体地,在可移动元件101在Z方向上移动了预定量以上的情况下,Z辊262与引导构件108的内侧相接触并防止可移动元件101进一步移动。类似地,在可移动元件101在Y方向上移动了预定量以上的情况下,Y辊261与引导构件108的内侧相接触并防止可移动元件101进一步移动。
尽管在作为示例的本示例性实施例中引导构件108布置在可移动元件101上并且Z辊262和Y辊261布置在定子201上,但是引导构件108可以布置在定子201上。在此情况下,Z辊262和Y辊261沿着X方向(第一方向)布置在可移动元件101的侧表面101b上。
接下来,将在下面参照图3A至3C描述线圈单元。
在本示例性实施例中,线圈单元包括第一线圈群,所述第一线圈群包括沿着第一方向布置的六个线圈103。此外,线圈单元1031包括第二线圈群,所述第二线圈群包括三个线圈组,每个线圈组包括沿着与第一方向交叉的第二方向布置的两个线圈103。具体地,举例说明了包括第一线圈群的六个线圈103和第二线圈群的六个线圈103的线圈单元1031,但是线圈单元1031不限于上述示例。图3A示出了从正Z方向观察的线圈单元103R。线圈单元103R包括十二个线圈103a1R至103a3R、103b1R至103b6R、以及103c1R至103c3R。永磁体203是定子201上的永磁体。
每个线圈103连接到可移动元件控制器302,并且彼此独立地控制六个线圈103a1R至103a3R以及103c1R至103c3R的电流量。
具有相同大小的电流按照彼此不同的方向分别施加到线圈103b1R和103b4R。类似地,具有相同大小的电流按照彼此不同的方向分别施加到线圈103b2R和103b5R,并且具有相同大小的电流按照彼此不同的方向分别施加到线圈103b3R和103b6R。
下面将参照图6描述线圈103b1R和103b4R的动作。
理想地,图6中的线圈103b1R和103b4R是绕组线圈,并且线圈103b1R和103b4R的绕组方向被确定成使得线圈103b1R和103b4R的靠近永磁体203的磁极为彼此相反。本示例性实施例不限于上述的内容,并且可以控制每个线圈103以使得相同大小的电流按照不同的方向施加在线圈103之间。
例如,如图6所示,将电流施加到线圈103b1R和103b4R,以使得线圈103b1R的靠近永磁体203的磁极为S极,并且线圈103b4R的靠近永磁体203的磁极为N极。在永磁体203的靠近线圈103的磁极被磁化为S极的情况下,力Fyn和Fyp朝着正Y侧作用在线圈103b1R和103b4R上,并且因此可移动元件101在正Y方向上移动。
同时,在Z方向上的力Fzn和Fzp相互抵消。
如上所述,线圈单元103R和103L均包括:六个线圈103,其中每个线圈的电流都被独立地控制;以及三个线圈组,每个线圈组包括按照彼此不同的方向施加相同大小的电流的两个线圈103。所述六个线圈103(其中每个线圈的电流都被独立地控制)是线圈103a1至103a3以及线圈103c1至103c3。所述三个线圈组(每个线圈组包括按照彼此不同的方向施加相同大小的电流的两个线圈103)是线圈103b1和103b4、线圈103b2和103b5、以及线圈103b3和103b6。
图3B示出了从正Y方向观察的线圈单元103R。永磁体203中的每个箭头示意性地表示永磁体203中的磁化方向。
图3C是推力常数曲线,其示意性地示出了当单位电流被施加到线圈单元103R的线圈103时生成的X方向上的力Fx、Y方向上的力Fy和Z方向上的力Fz的大小。
从定子201的基准位置Of观察,距作为可移动元件101的基准位置的原点Om的距离用X表示。
响应于施加到线圈103a1R至103a3R以及103c1R至103c3R的电流,主要在X方向和Z方向上生成力。在Y方向上生成的力很小,可以忽略不计。
响应于施加到线圈103b1R和103b4R、线圈103b2R和103b5R、以及线圈103b3R和103b6R的电流,主要在Y方向上生成力,如图6所示。在X方向和Z方向上也略微生成力但是很小,可以忽略不计。
在图3A和3C中,例如,Fx(a1R,x)示意性地表示在可移动元件101在X方向上的位置是位置x的情况下,响应于施加到线圈103a1R的单位电流而生成的X方向上的力的大小。Fx的括号中的第一和第二参数分别是线圈索引和可移动元件101在X方向上的位置。
类似地,在图3B和3C中,Fz(a3R,x)表示在可移动元件101在X方向上的位置是位置x的情况下,响应于施加到线圈103a3R的单位电流而生成的Z方向上的力的大小。
类似地,在图3A和3C中,Fy(b1R·b4R,x)表示在可移动元件101在X方向上的位置是位置x的情况下,响应于施加到线圈103b1R和103b4R的单位电流而生成的Y方向上的力的大小。
理想地,关于永磁体203和线圈103的尺寸,三个线圈103的尺寸与两个永磁体203的尺寸匹配。对于线圈单元103L同样如此。
接下来,将参照图4A在下文描述根据本示例性实施例的控制输送系统1的控制系统。图4A是示出根据本示例性实施例的控制输送系统1的控制系统的示意图。
如图4A所示,控制系统包括集成控制器301和可移动元件控制器302并且用作控制装置,所述控制装置控制包括可移动元件101和定子201的输送系统1。
线圈103、编码器111、Y传感器112和Z传感器113连接到可移动元件控制器302以彼此通信。可移动元件控制器302经由线缆130连接到集成控制器301并从集成控制器301接收输送指令和电力供应。可移动元件控制器302单独地控制所连接的每个线圈103的电流量。
可移动元件控制器302基于来自编码器111、Y传感器112和Z传感器113的输出来计算可移动元件101的位置和取向。
此外,可移动元件控制器302基于可移动元件101的位置和位置的变化来确定要施加到多个线圈103的电流指令值。
如上所述,集成控制器301和可移动元件控制器302用作控制装置、以无物理接触的方式沿着定子201输送可移动元件101、并且沿六个轴控制被输送的可移动元件101的取向。
下面将参照图2描述可移动元件101的位置的X坐标的检测方法。
在图2中,可移动元件101上的编码器111读取定子201上的标尺211的图案并获取可移动元件101在输送方向上的X坐标。
编码器111和标尺211可以是绝对位置检测类型,或者可以是增量编码器和适当的复位信号的组合。
下面将参照图1和图2描述可移动元件101的位置的Y坐标的检测方法。
Y传感器112是检测Y传感器112和Y目标212之间的距离的传感器。Y目标212沿着输送路径连续地布置。
由Y传感器112bR和112fR检测到的可移动元件101的检测值分别由Y112bR和Y112fR表示。
在Y传感器112bR和112fR的坐标分别表示为(a2,b)和(-a2,b)的情况下,可移动元件101的Y位置和围绕Z轴的旋转量Wz通过以下的公式1a和1b进行计算:
Y=(Y112bR+Y112fR)/2 (1a),以及
Wz=(Y112bR-Y112fR)/(2*a2) (1b)
下面将参照图1A和图2描述可移动元件101的Z位置的检测方法。
Z传感器113是检测Z传感器113和Z目标213之间的距离的传感器。Z目标213沿着输送路径连续地布置。
Z传感器113设置在可移动元件101上的三个以上的位置处。
例如,在如图1A所示的三个位置处的Z传感器113的位置113bL、113fL和113cR的XY坐标分别表示为(-a,-b)、(a,-b)和(0,b)。可移动元件101的取向和Z位置Z、围绕Y轴的旋转量Wy、以及围绕X轴的旋转量Wx通过以下的公式1c、1d和1e进行计算:
Z=(Z113bL+Z113fL+Z113cR)/3 (1c),
Wx=(Z113cR-(Z113bL+Z113fL)/2)/(2*b) (1d),和
Wy=(Z113bL-Z113fL)/(2*a) (1e)
其中,Z113bL、Z113fL和Z113cR分别是Z传感器113的检测值。
接下来,下面将参照图5描述由可移动元件控制器302控制可移动元件101的取向的方法。图5示意性地示出了用于计算要施加到可移动元件101的力的大小的控制闭环。
目标值ref是由集成控制器301指定的可移动元件101的取向的目标值,并且当前位置pos是从Y传感器112和Z传感器113获取的关于可移动元件101的取向信息。取向控制器501基于目标值ref和当前位置pos之间的差err计算要施加到可移动元件101的转矩T。
基于计算出的转矩T确定要施加到线圈单元103的电流I,并且响应于期望电流的输出,将该输出用作可移动元件101上的力F并最终检测为当前位置pos。
取向控制器501可以是例如比例-积分-微分(PID)控制器。替代地,可以根据可移动元件101的特性根据需要放置滤波器以稳定可移动元件101的取向。
要施加到可移动元件101的转矩T由下面的公式2表示。分量Tx、Ty和Tz是转矩T的三轴分量并且分别是转矩T的X方向分量、Y方向分量和Z方向分量。此外,分量Twx、Twy和Twz是力矩的三轴分量并且分别是围绕X轴的力矩的分量、围绕Y轴的力矩的分量和围绕Z轴的力矩的分量。通过控制转矩T的六轴分量Tx、Ty、Tz、Twx、Twy和Twz,根据本示例性实施例的输送系统1沿六个轴控制可移动元件101的取向并同时控制可移动元件101的输送。
T=(Tx,Ty,Tz,Twx,Twy,Twz) (2)
首先,将给出期望转矩T所要满足的通式。
在可移动元件101的右侧的六个线圈103和三组两个线圈103的线圈编号索引将用j表示。例如,线圈编号索引是103a1R、103a2R、103a3R、103b1·4R、103b2·5R、103b3·6R、103c1R、103c2R和103c3R。
此外,在可移动元件101的左侧的六个线圈103和三组两个线圈103的线圈编号索引103a1L、103a2L、103a3L、103b1·4L、103b2·5L、103b3·6L、103c1L、103c2L和103c3L也将用j表示。
Tx=ΣIj*Fx(j,x) (3a),
Ty=ΣIj*Fy(j,x) (3b),
Tz=ΣIj*Fz(j,x) (3c),
Twx=-ΣIj*Fz(j,x)*Yj (3d),
Twy=ΣIj*Fz(j,x)*Xj (3e),以及
Twz=ΣIj*Fx(j,x)*Yj-ΣIj*Fy(j,x)*Xj (3f)
其中,Ij是要施加到第j个线圈的电流的大小,(Xj,Yj)是第j个线圈的坐标,并且Σ是在j从1变为18的情况下的求和。
因此,在确定了满足公式3a至3f的电流值Ij的情况下,施加期望转矩T。
上述电流值Ij具有18个自由度(六个线圈103和三组两个线圈103中的两个组(R侧和L侧)),而转矩T具有六个自由度,使得电流值Ij有许多解。因此,设定适当的约束条件以获得电流值Ij的解。
接下来,下面将描述唯一地确定线圈电流值Ij的方法。在下面描述的力的表达式中,分别在X方向、Y方向和Z方向上作用的力分别由x、y和z表示,并且在图1A中在正Y侧的R侧、负Y侧、正X侧、负X侧和中心分别由R、L、F、b和c表示。
在图1A中,分别作用在R侧和L侧的线圈103上的力矢量F表示如下。作用在对应线圈103上的每个力F是在永磁体203和施加电流的多个线圈103之间生成的电磁力。永磁体203和施加电流的多个线圈103在作为可移动元件101的输送方向的X方向上生成电磁力,并且在与X方向不同的Y方向和Z方向上生成电磁力。
在图1A和3A中从线圈103生成的力F列举如下:
FxbL:从线圈103a1L、103a2L和103a3L生成的X方向上的力,
FzbL:从线圈103a1L、103a2L和103a3L生成的Z方向上的力,
FycL:从线圈103b1·4L(线圈103b1L和103b4L)、103b2·5L(线圈103b2L和103b5L)和103b3·6L(线圈103b3L和103b6L)生成的Y方向上的力,
FxfL:从线圈103c1L、103c2L和103c3L生成的X方向上的力,
FzfL:从线圈103c1L、103c2L和103c3L生成的Z方向上的力,
FxbR:从线圈103a1R、103a2R和103a3R生成的X方向上的力,
FzbR:从线圈103a1R、103a2R和103a3R生成的Z方向上的力,
FycR:从线圈103b1·4R(线圈103b1R和103b4R)、103b2·5R(线圈R103b2R和103b5R)和103b3·6R(线圈103b3R和103b6R)生成的Y方向上的力,
FxfR:从线圈103c1R、103c2R和103c3R生成的X方向上的力,和FzfR:从线圈103c1R、103c2R和103c3R生成的Z方向上的力。
力F被定义为:F=(FxbL,FzbL,FycL,FxfL,FzfL,FxbR,FzbR,FycR,FxfR,FzfR)。
通过以下公式4a、4b、4c、4d、4e和4f分别计算f转矩T(Tx、Ty、Tz、Twx、Twy、Twz):
Tx=FxfR+FxbR+FxfL+FxbL (4a),
Ty=FycL+FycR (4b),
Tz=FzbR+FzbL+FzfR+FzfL (4c),
Twx={(FzfL+FzbL)-(FzfR+FzbR)}*2*rx3 (4d),
Twy={(FzfL+FzfR)-(FzbL+FzbR)}*2*ry3 (4e),和
Twz={(FxfL+FxbL)-(FxfR+FxbR)}*2*rx3 (4f)
由于力F具有十个自由度,为了根据具有六个自由度的转矩T计算出力F,进一步引入了四个约束。
为了平均分配作用在相同轴上的力F而引入以下三个公式的约束:
FxfR=FxbR (4g),
FxfL=FxbL (4h),以及
FycL=FycR (4i)
此外,为了将围绕Y轴的旋转力平均分配到L侧和R侧而引入以下的约束:
FzfR-FzbR=FzfL-FzbL (4j)
一旦根据上述的十个公式4a至4j确定了转矩T,就确定了力F。
到此为止,唯一地确定了十个力矢量F。
下面将由此开始描述唯一地确定线圈103的电流值的方法。
使用线圈103a1L、103a2L和103a3L的电流值Ia1L、Ia2L和Ia3L以及推力常数曲线的取值而将FxbL和FzbL表示如下:
FxbL=Fx(a1L,x)*IL1+Fx(a2L,x)*Ia1L+Fx(a3L,x)*Ia3L(5a),以及
FzbL=Fz(a1L,x)*Ia1L+Fz(a2L,x)*Ia2L+Fz(a3L,x)*Ia3L(5b)。
然后,引入以下的约束:Ia1L+Ia2L+Ia3L=0 (5c),
并且因此相对于未知数Ia1L、Ia2L和Ia3L获得三个独立的条件,从而唯一地确定电流值Ia1L、Ia2L和Ia3L。
通过类似的方法,根据FxfL和FzfL确定电流值Ic1L、Ic2L和Ic3L:
FxfL=Fx(c1L,x)*Ic1L+Fx(c2L,x)*Ic2L+Fx(c3L,x)*Ic3L (6a),
FzbL=Fz(c1L,x)*Ic1L+Fz(c2L,x)*Ic2L+Fz(c3L,x)*Ic3L (6b),以及
Ic1L+Ic2L+Ic3L=0 (6c)
通过类似的方法,根据FxbR和FzbR确定电流值Ia1R、Ia2R和Ia3R:
FxbR=Fx(a1R,x)*Ia1R+Fx(a2R,x)*Ia2R+Fx(a3R,x)*Ia3R (7a),
FzbR=Fz(a1R,x)*Ia1R+Fz(a2R,x)*Ia2R+Fz(a3R,x)*Ia3R (7b),以及
Ia1R+Ia2R+Ia3R=0 (7c)
通过类似的方法,根据FxfR和FzfR确定电流值Ic1R、Ic2R和Ic3R:
FxfR=Fx(c1R,x)*Ic1R+Fx(c2R,x)*Ic2R+Fx(c3R,x)*Ic3R (8a),
FzbR=Fz(c1R,x)*Ic1R+Fz(c2R,x)*Ic2R+Fz(c3R,x)*Ic3R (8b),以及
Ic1R+Ic2R+Ic3R=0 (8c)
接下来,下面将描述根据FycL和FycR确定电流值I(b1·4L)、I(b2·5L)、I(b3·6L)、I(b1·4R)、I(b2·5R)、以及I(b3·6R)的方法。
还根据以下的公式唯一地确定电流值I(b1·4L)、I(b2·5L)和I(b3·6L):
FycL=Fy((b1·4L),x)*I(b1·4L)+Fy((b2·5L),x)*I(b2·5L)+Fy((b3·6L),x)*I(b3·6L) (9a),
I(b1·4L)+I(b2·5L)+I(b3·6L)=0 (9b),以及
I(b1·4L):I(b2·5L):I(b3·6L)=Fy((b1·3L),x):Fy((b2·5L),x):Fy((b3·6L),x),即
I(b3·6L)*Fy((b1·4L),x)=I(b2·5L)*Fy((b2·5L),x)=I(b1·4L)*Fy((b3·6L),x) (9c)
类似地,还根据以下的公式唯一地确定电流值I(b1·4R)、I(b2·5R)和I(b3·6R):
FycR=Fy((b1·4R),x)*I(b1·4R)+Fy((b2·5R),x)*I(b2·5R)+Fy((b3·6R),x)*I(b3·6R) (9d),
I(b1·4R)+I(b2·5R)+I(b3·6R)=0 (9e),以及
I(b1·4R):I(b2·5R):I(b3·6R)=Fy((b1·4R),x):Fy((b2·5R),x):Fy((b3·6R),x),即
I(b3·6R)*Fy((b1·4R),x)=I(b2·5R)*Fy((b2·5R),x)=I(b1·4R)*Fy((b3·6R),x) (9f)
通过如上所述地控制要施加到多个线圈103的电流,可移动元件控制器302控制要施加到可移动元件101的力的六轴分量中的每一个。
通过如上所述地确定和控制要施加到多个线圈103的电流的电流指令值,可移动元件控制器302控制可移动元件101在定子201上的无接触输送,同时沿六个轴控制可移动元件101在定子201上的取向。具体地,可移动元件控制器302用作控制可移动元件101的输送的输送控制单元,并且通过控制永磁体203从多个线圈103接收的电磁力来控制可移动元件101在定子201上的无接触输送。此外,可移动元件控制器302用作取向控制单元,其控制可移动元件101的取向,并且沿六个轴控制可移动元件101在定子201上的取向。
如上所述,根据本示例性实施例,两列中的多个线圈103将三轴力分量Tx、Ty和Tz以及三轴力矩分量Twx、Twy和Twz组成的六轴力施加到可移动元件101。以该方式,控制可移动元件101的输送,同时沿六个轴控制可移动元件101的取向。根据本示例性实施例,通过使用两列中的线圈103(其少于要作为变量进行控制的力的六轴分量的数量),就可以在沿六个轴控制可移动元件101的取向的同时控制可移动元件101的输送。
因此,根据本示例性实施例,由于减少了线圈103的列数,因此可以在不增加系统尺寸或系统的复杂性的情况下实现可移动元件101的无接触输送并且控制可移动元件101的取向。此外,根据本示例性实施例,由于减少了线圈103的列数,因此可以实现小型且廉价的磁悬浮型输送系统。
尽管在本示例性实施例中将永磁体203布置在定子201中,但是可以不使用永磁体,而可以使用软磁性材料,并且将电流施加到可移动元件101的线圈103以在定子201的软磁性材料和可移动元件101的线圈103之间生成力。这就在控制可移动元件101的取向的同时通过简单的结构实现了可移动元件101的无接触输送或旋转。在本说明书中,硬磁性材料(例如永磁体)或软磁性材料被称为“磁性体”。
[第二示例性实施例]
下面将参照图4B描述第二示例性实施例。图4B是示出根据本示例性实施例的控制输送系统1的控制系统的示意图。与第一示例性实施例中的部件相同或相似的部件被赋予相同的附图标记,并且省略或简化该部件的重复性描述。
根据本示例性实施例的可移动元件101的基本结构与第一示例性实施例大致相同。在第一示例性实施例中,可移动元件控制器302和集成控制器301经由线缆130连接。根据本示例性实施例的可移动元件控制器302从集成控制器301无线地接收输送指令。
在图4B中,增加了定子201的无线单元601、可移动元件101的无线单元602以及电池603来代替图4A中的线缆130。无线单元601和602理想地是5G无线单元,原因在于其等待时间低。
根据本示例性实施例,由于可移动元件101是无线缆的,因此实现了更精确的无接触状态。因此,本示例性实施例适合于在高真空中移动的沉积装置。
[变型例]
本公开不限于上述的示例性实施例,并且可以进行各种变型。
例如,在真空环境或水下环境中使用的情况下,有机物质可能从在线圈103周围或芯材料中使用的塑料构件释放或泄漏。类似地,用于绝缘的粘合剂可能会部分泄漏或变质。
因此,尤其是在没有多少灰尘的环境中(例如真空环境、水下环境或无尘室),理想的是借助用于与周围环境绝缘的部件来覆盖线圈103和线圈103附近的部件。
尽管已有各种各样的绝缘方法,但合适的是用金属盒覆盖单个或多个线圈并且在内部填充气体。
此外,为了将由线圈103生成的热排出和释放到外部,所述气体理想地是具有高热导率的气体。例如,氦气是理想的,或者也可以使用氢气。
氮气、二氧化碳气体和气氛也足以用于保护线圈103附近的部件。
此外,可以使用包括多个线圈盒单元的线圈阵列,每个线圈盒单元包括整体按盒形排列和布置的单个或多个线圈。
尽管在示例性实施例中仅将电磁力用作线圈103从永磁体203接收以使可移动元件101悬浮的悬浮力,但是本公开不限于上面描述的那些内容。例如,在可移动元件101的质量或保持在可移动元件101的上表面101a或下表面101c上的工件102的质量较大从而要在竖直方向上施加大的悬浮力的情况下,由诸如空气的流体生成的静压力可以附加地用于悬浮以补充悬浮力。
尽管在本示例性实施例中将第一线圈群103布置成两列,但是本公开不限于上面描述的那些内容。例如,第一线圈群103可以布置成三列、四列或五列。在可移动元件101的取向的六轴控制中,本公开使用比变量的数量(即,在可移动元件101的取向的六轴控制中为六个)更少的线圈103的列数实现了可移动元件101的取向的六轴控制。
根据本公开的示例性实施例的输送系统可以在制造诸如电子装置的物品的系统中用作输送系统,所述输送系统将工件与可移动元件一起输送到对工件进行加工以加工成物品的加工装置(例如机械工具)的工作区域。执行加工的加工装置可以是任何装置,例如组装零件和工件的装置、涂覆装置和沉积装置。要制造的物品不限于特定物品,并且可以是任何零件。
如上所述,通过使用根据本公开的示例性实施例的输送系统将工件输送到工作区域并对输送到工作区域的工件进行加工来制造物品。通过使用根据本公开的示例性实施例的输送系统,避免了如上所述的系统尺寸的增加和系统复杂性的增加。因此,在使用根据本公开的示例性实施例的输送系统来输送工件的物品制造系统中,执行加工的装置能够以高自由度布置且不会增加系统尺寸或系统的复杂性。
其他实施例
本公开的实施例还可以通过读出并执行记录在存储介质(也可以更完整地被称为“非暂时性计算机可读存储介质”)上的计算机可执行指令(例如,一个或多个程序)以执行上述一个或多个实施例的功能和/或包括用于执行上述一个或多个实施例的功能的一个或多个电路(例如,专用集成电路(ASIC))的系统或装置的计算机来实现,以及通过由系统或装置的计算机执行的方法来实现,例如,通过从存储介质读出并执行计算机可执行指令以执行上述一个或多个实施例的功能和/或控制一个或多个电路以执行上述一个或多个实施例的功能来实现。计算机可以包括一个或多个处理器(例如,中央处理单元(CPU),微处理单元(MPU)),并且可以包括单独的计算机或单独的处理器的网络以读出和执行计算机可执行指令。可以将计算机可执行指令提供给计算机,例如从网络或存储介质提供。存储介质可以包括例如硬盘、随机存取存储器(RAM)、只读存储器(ROM)、分布式计算系统的存储器、光盘(譬如高密度光盘(CD)、数字通用光盘(DVD)或蓝光光盘(BD)
其他实施例
本发明的实施例还可以通过如下的方法来实现,即,通过网络或者各种存储介质将执行上述实施例的功能的软件(程序)提供给系统或装置,该系统或装置的计算机或是中央处理单元(CPU)、微处理单元(MPU)读出并执行程序的方法。
尽管已经参考示例性实施例描述了本公开,但是应当理解,本公开不限于所公开的示例性实施例。所附权利要求的范围应被赋予最广泛的解释,以便涵盖所有这样的变型以及等同的结构和功能。
- 输送系统、可移动元件、控制装置、控制方法以及物品的制造方法
- 具有包括内囊元件和外囊元件以及加强元件的缓冲组件的物品及制造物品的方法