砌筑方法、砌砖机器人、砌筑系统及存储介质
文献发布时间:2024-01-17 01:26:37
技术领域
本发明涉及建筑自动化技术领域,尤其涉及一种砌筑方法、砌砖机器人、砌筑系统及存储介质。
背景技术
随着科学技术的不断发展,尤其是建筑自动化控制领域,现在越来越多的机器人应用于建筑施工,使用机器人代替人工砌墙,从而实现智能化。
但是,目前被开发出来的机器人主要是在空旷的环境下进行砌墙控制,其砌砖的核心是抓取砌块准确的砌筑到目标位置,而实现精准的定位,则需要基于传感器进行位置姿态的精确调整。对此,在没有障碍物的场景下,现有的机器人可以比较容易的规划轨迹,实现砌块的砌筑。而对于有障碍物、特殊位置的砌砖,目前的机器人主要是通过控制绕开障碍物,或者是基于图像定位的方式来实现砌砖,但是,这样的方式仍然无法解决砌砖过程中,砌块不与已经砌筑的墙体或浇筑的剪力墙碰撞的问题。
发明内容
本发明的主要目的在于解决现有的机器人在砌砖控制时,无法保证砌块不与已经砌筑完成的砌块碰撞,导致砌筑精准度较低的技术问题。
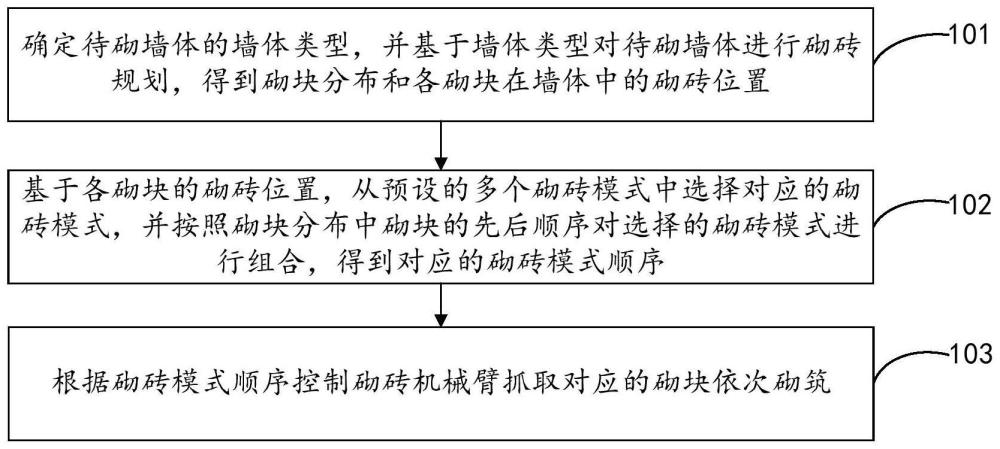
本发明第一方面提供了一种砌筑方法,应用于砌砖机器人的砌墙作业,所述砌砖机器人至少包括砌砖机械臂,所述砌筑方法包括:确定待砌墙体的墙体类型,并基于所述墙体类型对所述待砌墙体进行砌砖规划,得到砌块分布和各砌块在墙体中的砌砖位置;基于各所述砌块的砌砖位置,从预设的多个砌砖模式中选择对应的砌砖模式,并按照所述砌块分布中砌块的先后顺序对选择的砌砖模式进行组合,得到对应的砌砖模式顺序;根据所述砌砖模式顺序控制所述砌砖机械臂抓取对应的砌块依次砌筑。
可选的,在本发明第一方面的第一种实现方式中,所述基于各所述砌块的砌砖位置,从预设的多个砌砖模式中选择对应的砌砖模式,并按照砌块分布中砌块的先后顺序对选择的砌砖模式进行组合,得到对应的砌砖模式顺序,包括:基于各所述砌块的砌砖位置,确定对应的砌块类型,其中,所述砌块类型包括加气块和混凝土预制块;判断砌块所在的所述砌砖位置是否属于预设的特殊位置,得到判断结果;基于所述判断结果从预设的多个砌砖模式中选择对应的抹浆方式、挤压方式、抓砖方式和定位方式;将所述抹浆方式、所述挤压方式、所述抓砖方式和所述定位方式进行组合,得到对应的砌块的砌砖模式;按照砌块分布中砌块的先后顺序对各所述砌砖模式进行排序,得到对应的砌砖模式顺序。
可选的,在本发明第一方面的第二种实现方式中,所述将所述抹浆方式、所述挤压方式、所述抓砖方式和所述定位方式进行组合,得到对应的砌块的砌砖模式,包括:将所述抹浆方式、所述挤压方式、所述抓砖方式和所述定位方式按照砌砖流程顺序进行组合,得到与砌块对应的砌砖模式。
可选的,在本发明第一方面的第三种实现方式中,若所述判断结果为不属于预设的特殊位置时,所述基于所述判断结果从预设的多个砌砖模式中选择对应的抹浆方式、挤压方式、抓砖方式和定位方式,包括:基于所述砌砖位置,从预设的多个砌砖模式中选择第一抹浆方式、第一挤压方式、正面抓砖方式和激光传感器定位方式,其中所述激光传感器设于所述砌砖机械臂的末端位置上。
可选的,在本发明第一方面的第四种实现方式中,若所述判断结果为属于预设的特殊位置时,在所述基于所述判断结果从预设的多个砌砖模式中选择对应的抹浆方式、挤压方式、抓砖方式和定位方式之前,还包括:判断所述砌砖位置是否为顶部位置;判断所述砌砖位置是否为已完成砌筑的砌块和剪力墙之间的位置;判断所述砌砖位置是否属于转角位置。
可选的,在本发明第一方面的第五种实现方式中,所述基于所述判断结果从预设的多个砌砖模式中选择对应的抹浆方式、挤压方式、抓砖方式和定位方式,包括:若判断所述砌砖位置属于预设的特殊位置且是顶部位置时,基于所述砌砖位置,从预设的多个砌砖模式中选择第一抹浆方式、第一挤压方式、侧面抓砖方式和激光传感器定位方式;若判断所述砌砖位置属于预设的特殊位置且是已完成砌筑的砌块和剪力墙之间的位置时,基于所述砌砖位置,从预设的多个砌砖模式中选择第二抹浆方式、第一挤压方式、正面抓砖方式和激光传感器定位方式;若判断所述砌砖位置属于预设的特殊位置且属于转角位置时,基于所述砌砖位置,从预设的多个砌砖模式中选择第三抹浆方式、第二挤压方式、正面抓砖方式和视觉定位方式。
可选的,在本发明第一方面的第六种实现方式中,若判断所述砌砖位置属于预设的特殊位置且是已完成砌筑的砌块和剪力墙之间的位置时,基于所述砌砖位置,从预设的多个砌砖模式中选择第一挤压方式,包括:识别所述砌砖位置上的所述剪力墙相对于已完成砌筑的砌块的位置关系;基于所述位置关系确定对应的砌块的砌筑方向;从预设的多个砌砖模式中选择满足所述砌筑方向的挤压组合,得到第一挤压方式,其中,所述挤压组合为向下-向左挤压组合或者向下-向右挤压组合。
可选的,在本发明第一方面的第七种实现方式中,所述砌砖机器人还包括抹浆机构和翻转机构;在所述根据所述砌砖模式顺序控制所述砌砖机械臂抓取对应的砌块依次砌筑之前,还包括:确定所述目标砌块在所述抹浆机构上的摆放方向;基于所述摆放方向判断所述目标砌块上被抹浆的表面是否与所述目标位置上的粘贴表面匹配;若不匹配,则控制所述翻转机构将所述目标砌块进行放转,直至所述目标砌块上被抹浆的表面与所述目标位置上的粘贴表面匹配。
可选的,在本发明第一方面的第八种实现方式中,所述根据所述砌砖模式顺序控制所述砌砖机械臂抓取对应的砌块依次砌筑,包括:从所述砌砖模式顺序中确定目标砌砖模式,并基于所述目标砌砖模式确定目标砌块以及所述目标砖块的目标位置,其中,所述目标砌砖模式为所述砌砖机械臂在当前时刻下执行的砌砖模式;基于所述砌砖模式中的抓砖方式,控制所述砌砖机械臂移动至对应砌块类型的砖区内抓取已按照对应的抹浆方式抹浆的目标砌块,并移动至预设的初始定位位置;基于所述砌砖模式中的定位方式,测量所述目标砌块在所述初始定位位置上相对于所述目标位置的位移量和夹角,并基于所述位移量和所述夹角确定调整量;基于所述调整量对所述目标砌块进行位置调整,并利用砌砖模式中的挤压方式将调整后的目标砌块砌筑至所述目标位置上。
可选的,在本发明第一方面的第九种实现方式中,所述砌筑方法还包括:通过以下方式确定所述初始定位位置:基于所述砌砖机械臂的预设等待位置、所述目标位置和预设的标准距离,计算出所述砌砖机械臂在砌砖时的初始定位位置,其中,所述标准距离为目标砌块与上一块已完成砌筑的目标砌块之间的最小位姿调整距离。
可选的,在本发明第一方面的第十种实现方式中,若所述目标位置不属于预设的特殊位置时,所述基于所述砌砖模式中的抓砖方式,控制所述砌砖机械臂移动至对应砌块类型的砖区内抓取已按照对应的抹浆方式抹浆的目标砌块,并移动至预设的初始定位位置,包括:基于所述砌砖模式中的第一抹浆方式对对应的砌块类型的目标砌块的表面进行抹浆;控制所述砌砖机械臂移动至所述目标砌块所在的砖区,并通过正面抓砖方式抓取所述目标砌块;在夹紧所述目标砌块后,控制所述砌砖机械臂将所述目标砌块移动至预设的初始定位位置。
可选的,在本发明第一方面的第十一种实现方式中,若所述目标位置属于顶端位置时,所述基于所述砌砖模式中的抓砖方式,控制所述砌砖机械臂移动至对应砌块类型的砖区内抓取已按照对应的抹浆方式抹浆的目标砌块,并移动至预设的初始定位位置,包括:基于所述砌砖模式中的第一抹浆方式对对应的砌块类型的目标砌块的表面进行抹浆;控制所述砌砖机械臂移动至所述目标砌块所在的砖区,并通过侧面抓砖方式抓取目标砌块;在夹紧所述目标砌块后,控制所述砌砖机械臂将所述目标砌块移动至预设的初始定位位置。
可选的,在本发明第一方面的第十二种实现方式中,若所述目标位置是已完成砌筑的砌块和剪力墙之间的位置时,所述基于所述砌砖模式中的抓砖方式,控制所述砌砖机械臂移动至对应砌块类型的砖区内抓取已按照对应的抹浆方式抹浆的目标砌块,并移动至预设的初始定位位置,包括:基于所述砌砖模式中的第二抹浆方式对对应的砌块类型的目标砌块中的三个表面进行抹浆,其中,三个表面包括两个相对的侧表面和位于两个相对的侧表面之间的底表面;控制所述砌砖机械臂移动至所述目标砌块所在的砖区,并通过正面抓砖方式抓取目标砌块;在夹紧所述目标砌块后,控制所述砌砖机械臂将所述目标砌块移动至预设的初始定位位置。
可选的,在本发明第一方面的第十三种实现方式中,所述基于所述砌砖模式中的定位方式,测量所述目标砌块在所述初始定位位置上相对于所述目标位置的位移量和夹角,并基于所述位移量和所述夹角确定调整量,包括:控制所述砌砖机械臂调整所述目标砌块在所述初始定位位置上的位置姿态,将所述所述砌砖机械臂末端上的激光传感器射出激光落于相机的视野范围内;计算所述目标砌块中被抹浆的各表面与所述目标位置上的已完成砌筑的砌块的对应的表面之间的距离、俯仰角度和倾斜角度;基于所述距离、所述俯仰角度和所述倾斜角度确定调整量。
可选的,在本发明第一方面的第十四种实现方式中,若所述目标位置属于转角位置时,所述基于所述砌砖模式中的抓砖方式,控制所述砌砖机械臂移动至对应砌块类型的砖区内抓取已按照对应的抹浆方式抹浆的目标砌块,并移动至预设的初始定位位置,包括:基于所述砌砖模式中的第三抹浆方式对对应的砌块类型的目标砌块中的一个表面进行抹浆;控制所述砌砖机械臂移动至所述目标砌块所在的砖区,并通过正面抓砖方式从所述目标砌块中与被抹浆的表面相对应的表面的一侧抓取目标砌块;在夹紧所述目标砌块后,控制所述砌砖机械臂将所述目标砌块移动至预设的初始定位位置。
可选的,在本发明第一方面的第十五种实现方式中,所述基于所述砌砖模式中的定位方式,测量所述目标砌块在所述初始定位位置上相对于所述目标位置的位移量和夹角,并基于所述位移量和所述夹角确定调整量,包括:启动所述砌砖机械臂上的影像拾取装置,获取位于转角墙区域下的激光测量盒产生的十字激光面的信息;计算所述目标砌块的表面相对于所述十字激光面所构建的参考平面的第二位置关系,以及所述目标砌块中被抹浆的各表面与所述目标位置上的已完成砌筑的砌块的对应的表面之间的距离、俯仰角度、倾斜角度和绕高度方向的转角;基于所述第二位置关系、所述距离、所述俯仰角度和所述倾斜角度确定调整量。
本发明第二方面提供了一种砌砖机器人,所述砌砖机器人包括:控制器,以及分别与所述控制器连接的砌砖机械臂和抹浆机构;在所述砌砖机械臂上设有多个激光传感器和影像拾取装置;所述控制器,用于确定待砌墙体的墙体类型,并基于所述墙体类型对所述待砌墙体进行砌砖规划,得到砌块分布和各砌块在墙体中的砌砖位置;基于各所述砌块的砌砖位置,从预设的多个砌砖模式中选择对应的砌砖模式,并按照所述砌块分布中砌块的先后顺序对选择的砌砖模式进行组合,得到对应的砌砖模式顺序;所述砌砖机械臂,用于根据所述砌砖模式顺序抓取对应的砌块,并基于多个所述激光传感器和影像拾取装置进行辅助定位后,将抓取的砌块砌筑至对应的位置;所述抹浆机构,用于为所述砌块的表面抹浆。
本发明第三方面提供了一种砌筑系统,包括:至少一个如上所述的砌砖机器人和激光测量盒,其中,所述激光测量盒用于在转角位置产生十字激光面辅助所述砌砖机器人将抓取的砌块砌筑至对应的位置。
本发明第四方面提供了一种砌砖机器人,包括:存储器和至少一个处理器,所述存储器中存储有指令,所述存储器和所述至少一个处理器通过线路互连;所述至少一个处理器调用所述存储器中的所述指令,以使得所述砌砖机器人执行上述的砌筑方法的各个步骤。
本发明的第五方面提供了一种计算机可读存储介质,所述计算机可读存储介质中存储有指令,当其在计算机上运行时,使得计算机执行上述的砌筑方法的各个步骤。
本发明的技术方案中,通过针对每个砌砖位置的不同来设置对应的砌砖模式,而不同砌砖模式的控制,以实现对砌块的单独控制和精准控制,同时还保证了砌砖机器人对于各种复杂结构的墙体均可实现精准砌砖的控制,解决了现有的机器人在砌砖控制时,无法保证砌块不与已经砌筑完成的砌块碰撞,导致砌筑精准度较低的技术问题。
进一步的,砌砖模式包括抹浆方式、挤压方式、抓砖方式和定位方式,每个方式均对应一个砌块控制,以实现了砌块不同工序的精准控制,同时使用了定位方式来针对不同砌砖位置的辅助定位砌砖,进一步保证了砌砖机械臂的砌块的请准控制以及避障设置。
附图说明
图1为本发明实施例中砌砖机器人的整体结构示意图;
图2为本发明实施例中砌砖机械臂的结构示意图;
图3为本发明实施例中翻转机构和抹浆机构的结构示意图;
图4为本发明实施例中砌筑方法的第一个实施例示意图;
图5为本发明实施例中砌筑方法的第二个实施例示意图;
图6为本发明实施例中右砌筑的抹浆示意图;
图7为本发明实施例中左砌筑的抹浆示意图;
图8为本发明实施例中正面抓砖方式的示意图;
图9为本发明实施例中侧面抓砖方式的示意图;
图10为本发明实施例中左顶砌砖时翻转机构对砌块的翻转示意图;
图11为本发明实施例中右顶砌砖时翻转机构对砌块的翻转示意图;
图12为本发明实施例中砌筑方法的第三个实施例示意图;
图13为本发明实施例中左L正边定位的砌筑示意图;
图14为本发明实施例中左L侧边边定位的砌筑示意图;
图15为本发明实施例中右L正边定位的砌筑示意图;
图16为本发明实施例中右L侧边边定位的砌筑示意图;
图17为本发明实施例中砌筑方法的第四个实施例示意图;
图18为本发明实施例中剪力墙位置的砌筑示意图;
图19为本发明实施例中L形状墙的示意图;
图20为本发明实施例中T形状墙的爆炸示意图;
图21为本发明实施例中砌砖机器人的一个实施例示意图;
图22为本发明实施例中砌砖机器人的另一个实施例示意图。
具体实施方式
针对现有的砌砖机器人砌筑施工过程中需要进行顶部砌块的砌筑。在没有障碍物的场景下砌砖机器人可以比较容易的规划轨迹,实现砌块的砌筑。每面墙的顶部是梁的底部或是天花板。对于有障碍物的特殊的位置,需要制定特殊的策略来保证砌块不与已经砌筑的墙体或顶部的梁或天花板碰撞。本发明提出一种特殊场景下的砌筑策略。在砌筑每面墙的顶部位置时,保证砌块同时不与已经砌筑完成的砌块碰撞,实现精准砌筑。
本发明的说明书和权利要求书及上述附图中的术语“第一”、“第二”、“第三”、“第四”等(如果存在)是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的实施例能够以除了在这里图示或描述的内容以外的顺序实施。此外,术语“包括”或“具有”及其任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
为便于理解,下面对本发明实施例的具体流程进行描述,请参阅图4,本发明实施例中砌筑方法的第一个实施例,基于该砌筑方法本申请提供的砌砖机器人至少包括砌砖机械臂、抹浆机构、翻转机构和控制器,具体如图1和3所示,所述砌砖机器人主要包括底盘机构100、电柜机构200、翻转机构300、抹浆机构800、立柱机构400和砌砖机械臂500五个大的模块。其中,砌砖机械臂500包括工业机械臂机构510、协作机械臂机构520和砌砖夹爪机构530;工业机械臂机构510包括第一轴工业机械臂、第二轴工业机械臂和第三轴工业机械臂;协作机械臂机构520包括第四轴协作机械臂、第五轴协作机械臂和末端协作机械臂。进一步的,在砌砖机械臂上500还设有影像拾取装置和激光传感器,其中,影像拾取装置可以由视觉传感器构成。
此外,图1中还设有待砌筑墙壁600和多个激光测量盒700;其中,待砌筑墙壁600包括正面墙体610、右侧墙体620和左侧墙体630;每个激光测量盒700发射多条激光线,多条激光线形成一个竖直激光面,两个垂直摆放的激光测量盒700产生十字激光面,用于辅助砌砖机械臂500进行砌砖。
基于上述的结构基础,本申请提供的砌筑方法具体包括以下步骤:
101、确定待砌墙体的墙体类型,并基于墙体类型对待砌墙体进行砌砖规划,得到砌块分布和各砌块在墙体中的砌砖位置;
可以理解的是,本发明的执行主体可以为机器人上的控制器,还可以是机器人通信连接的终端或者服务器,具体此处不做限定。
在本实施例中,该待砌墙体包括直行墙、L型墙和T型墙中的至少一种,甚至还可以是三种墙的相互组合的墙体。
在确定待砌墙体后,首先需要对待砌墙体进行初步的砌块规划,具体包括:
确定所述待砌墙体的墙体类型,并基于墙体类型对待砌墙体进行分解,得到多个子墙体,而该子墙体可以是直行墙或者L型墙。
基于待砌墙体的整体形状来对每个子墙体进行砌块的规划,得到砌块分布,其中对于L型墙体来说,其实际上是分为两个直行子墙体,然后设置每个直行子墙体的一端设置成齿状,该齿状可理解为是每间隔一块就有一块突出的砌块,该砌块即是砖块。而对于T型墙体来说,其首先分为直行子墙体和L型子墙体,然后再将L型子墙体分为两个直行的。
将各子墙体组合成待砌墙体,并对各砌块设置对应的位置标号,得到各砌块的砌砖位置。
在本实施例中,在该步骤之前,还包括设置多个砌砖模式,该砌砖模式可以分为四种,分别是普通砌砖模式、顶部砌砖模式、剪力墙砌砖模式、转角砌砖模式,而每种砌砖模式均设置有对应的抹浆方式、挤压方式、抓砖方式和定位方式。
在对待砌墙体规划完砌块并确定各砌块的砌砖位置后,为每个砌块配置对应的砌砖模式,例如:砌砖位置位于两个砌块之间或者是墙体的中间位置时配置为普通砌砖模式,砌砖位置位于砌块剪力墙或者柱子之间时配置为剪力墙砌砖模式,砌砖位置位于转角位置时配置为转角砌砖模式,砌砖位置位于顶部时配置为顶部砌砖模式,其中这里的转角位置包括左L型墙体的转角和右L型墙体的转角,请参阅图1中三面墙体形成的两处转角,即分别为正面墙体610和左侧墙体630构成的左L型墙体的转角,以及正面墙体610和右侧墙体620够坦诚的右L型墙体的转角。
102、基于各砌块的砌砖位置,从预设的多个砌砖模式中选择对应的砌砖模式,并按照砌块分布中砌块的先后顺序对选择的砌砖模式进行组合,得到对应的砌砖模式顺序;
在本实施例中,除了针对每个砌砖位置配置砌砖模式之外,还包括基于砌砖位置确定砌块的类型,即是砌块的材质,不同位置可能会使用不同材质的砌块来实现不同的功能,如墙体和门,对此,砌块的材质分主要为加气块和混凝土预制块,混凝土预制块用于安装门的位置,竖直方向上每隔200mm布置一块。砌砖机器人砌筑根据排砖的位置排砖算法自动确定每块砖的材料属性,并自动进行语音提示。即是在砌块规划时会设置门位置,从而配置对应的材质的砌块。
在实际应用中,在为每个砌块选择了对应的砌砖模式后,为了便于砌砖机器人控制砌砖机械臂实现砌筑,对此,还需要对砌砖模式进行排序,即是对待砌墙体中的每个砌块进行组合,设置一个排序,砌砖机械臂基于排序来依次抓取对应的砌块按照对应的砌砖模式控制砌筑。
具体的,按照从下往上和从左到右或从右到左的方式对待砌墙体中的各砌块进行编号,基于编号的先后顺序来对砌砖模式进行排序,得到砌砖模式顺序。
103、根据砌砖模式顺序控制砌砖机械臂抓取对应的砌块依次砌筑。
在本实施例中,基于砌砖模式顺序依次执行砌砖模式进行抹浆、抓砖、定位和挤压的操作,从而实现对砌块的砌筑。
在实际应用中,在配置好了砌砖模式顺序后,启动砌砖机器人进行砌墙作业,首先控制砌砖机器人到达对应的位置上,并执行砌砖机器人中配置好的砌砖模式顺序,从砌砖模式顺序中按照先后顺序确定目标砌砖模式,执行目标砌砖模式到对应的取转位置进行取转,并在取转后执行定位和挤压的操作,从而实现砖块的砌筑。
在本实施例中,为了保证不同方向的砌砖,该砌砖机器人在对目标砌块抹浆后,基于砌筑的方向和位置确定砌块中被抹浆的表面的位置,并利用翻转机构调整砌块,以使得砌砖器械臂在抓砖调整后被抹浆的表面与待砌墙体中的目标位置上参考面匹配。
在本实施例中,通过确定待砌墙体的墙体类型,基于墙体类型对待砌墙体进行砌砖规划,得到砌块分布和各砌块在墙体中的砌砖位置;基于各砌块的砌砖位置,从预设的多个砌砖模式中选择对应的砌砖模式,并按照砌块分布中砌块的先后顺序对选择的砌砖模式进行组合,得到对应的砌砖模式顺序;根据砌砖模式顺序控制砌砖机械臂抓取对应的砌块依次砌筑。通过不同砌砖模式实现对砌块的单独控制和精准控制,同时还保证了砌砖机器人对于各种复杂结构的墙体均可实现精准砌砖的控制,解决了现有的机器人在砌砖控制时,无法保证砌块不与已经砌筑完成的砌块碰撞,导致砌筑精准度较低的技术问题。
请参阅图5,本发明实施例中砌筑方法的第二个实施例包括:
201、确定待砌墙体的墙体类型,并基于墙体类型对待砌墙体进行砌砖规划,得到砌块分布和各砌块在墙体中的砌砖位置;
在本实施例中,基于待砌墙体的类型对待砌墙体进行分解后,按照砖块的标准尺寸,利用砌块规划算法对分解后的待砌墙体进行砌块规划,然后对规划后的砌块按照砌筑的先后顺序进行编号,得到各砌块的砌砖位置。
202、基于各砌块的砌砖位置,确定对应的砌块类型,其中砌块类型包括加气块和混凝土预制块;
该步骤中,所述砌块类型可以理解为是砌块的材质,砌块的材质分为加气块和混凝土预制块,加气块用于砌墙体,混凝土预制块用于安装门的位置,一般是沿着竖直方向每隔200mm布置一块。砌砖机器人砌筑根据排砖的位置排砖算法自动确定每块砖的材料属性,同时还提供自动进行语音提示,用于提示抓砖的材质。
203、判断砌块所在的砌砖位置是否属于预设的特殊位置,得到判断结果;
该步骤中,所述特殊位置包括顶部的位置、靠近剪力墙的位置、靠近柱子的位置和转角的位置。
具体的,以待砌墙体中的每个砌块为目标逐个判断其位置是否属于特殊位置的范畴,基于将砌砖位置的具体坐标与待砌墙体中标记为特殊位置的区域进行匹配,得到判断结果。
204、基于判断结果从预设的多个砌砖模式中选择对应的抹浆方式、挤压方式、抓砖方式和定位方式;
本实施例中,所述判断结果包括所述砌块位置属于特殊位置和所述砌块位置不属于特殊位置;若所述判断结果为不属于预设的特殊位置时,基于所述砌砖位置,从预设的多个砌砖模式中选择第一抹浆方式、第一挤压方式、正面抓砖方式和激光传感器定位方式,如图2所示,所述激光传感器532设于所述砌砖机械臂500中砌砖夹爪机构530的末端位置上。其中,第一抹浆方式为两面抹浆,而两面抹浆具体还基于实际的砌筑方向来确定砌块中具体的抹浆的表面,如图6和7所示,分别是右砌和左砌的抹浆示意图,例如向左砌筑时,将砌砖机械臂夹紧后的砌块的左侧面和底面设置为抹浆面,然后在抓取砖之前利用抹浆翻滚机构对砌块的两个抹浆面进行抹浆后翻转,以使得抹浆面与待砌墙体的目标位置的目标参考面相互适配,该目标参考面包括水平目标参考面和竖直目标参考面,两个抹浆面分别与水平目标参考面和竖直目标参考面粘粘。
所述第一挤压方式包括向右-向下砌砖挤压方式和向左-向下砌砖挤压方式,其中,通过砌筑方向来确定定选择向右-向下砌砖挤压方式或者向左-向下砌砖挤压方式,即朝向竖直目标参考面挤压以及朝向水平目标参考面挤压,形成符合标准的竖直砖缝和水平砖缝;所述正面抓砖方式具体是从砌块的上方抓砖,如图8所示。
在本实施例中,若所述判断结果为属于预设的特殊位置时,在所述基于所述判断结果从预设的多个砌砖模式中选择对应的抹浆方式、挤压方式、抓砖方式和定位方式之前,还包括:
判断所述砌砖位置是否为顶部位置;
判断所述砌砖位置是否为已完成砌筑的砌块和剪力墙之间的位置;
判断所述砌砖位置是否属于转角位置。
进一步的,若判断所述砌砖位置属于预设的特殊位置且是顶部位置时,基于所述砌砖位置,从预设的多个砌砖模式中选择第一抹浆方式、第一挤压方式、侧面抓砖方式和激光传感器定位方式;对于顶部位置的抹浆方式非特殊位置(即是普通位置)的抹浆方式相同,即是采用两面抹浆,具体如图6和7所示。同时对于顶部位置的抓砖方式主要是抓取侧边的位置,具体如9所示,但是对于顶部位置的砌砖,砌砖机械臂上的砌砖夹爪在抓砖之前,需要通过翻转机构将抹浆后的砌块进行翻转处理,具体如图10和11所示。
若判断所述砌砖位置属于预设的特殊位置且是已完成砌筑的砌块和剪力墙之间的位置(即一列砖块的末位砖位置)时,基于所述砌砖位置,从预设的多个砌砖模式中选择第二抹浆方式、第一挤压方式、正面抓砖方式和激光传感器定位方式;其中,第二抹浆方式为抹浆于砖块的两个相对竖直面以及两个竖直面之间的水平表面,即是三面抹浆。,该三个抹浆面分别对应粘粘至三个参考面,分别为上一块砖块形成的竖直目标参考面、剪力墙/柱子形成的竖直目标参考面、以及上一列砖块形成的水平目标参考面。
若判断所述砌砖位置属于预设的特殊位置且属于转角位置时,基于所述砌砖位置,从预设的多个砌砖模式中选择第三抹浆方式、第二挤压方式、正面抓砖方式和视觉定位方式;所述第三抹浆方式为转角位置抹浆,即是单面抹浆,在砖块放置于待砌墙体的目标位置时,该单面的抹浆面朝下粘粘至已完成砌筑的砌块中水平的目标参考面;第二挤压方式为转角砌砖挤压方式,即是仅向下挤压;视觉定位方式为通过设于砌砖机械臂上的影像拾取装置采集转角区域下的激光盒子产生的十字激光面来辅助定位,如图2所示,该影像拾取装置531设于所述砌砖机械臂500的砌砖夹爪机构530的内侧位置上。
在实际应用中,对于判断所述砌砖位置属于预设的特殊位置且属于转角位置之后,还包括识别所述转角位置是以L型墙体的侧边定位砌筑还是正边定位砌筑,若是侧边定位砌筑,即是图19中标记为“I”的位置,则挤压方式为第一挤压方式,抹浆方式为第一抹浆方式,若是正边定位砌筑,即是图19中标记为“O”的位置,则挤压方式为第二挤压方式,抹浆方式为第三抹浆方式。
在本实施例中,若判断所述砌砖位置属于预设的特殊位置且是已完成砌筑的砌块和剪力墙之间的位置时,对于所述第一挤压方式的选择,具体包括:
识别所述砌砖位置上的所述剪力墙相对于已完成砌筑的砌块的位置关系,所述位置关系包括所述剪力墙位于已完成砌筑的左侧和所述剪力墙位于已完成砌筑的右侧;
基于所述位置关系确定对应的砌块的砌筑方向;
从预设的多个砌砖模式中选择满足所述砌筑方向的挤压组合,得到第一挤压方式,其中,所述挤压组合为向下-向左挤压组合或者向下-向右挤压组合。
在实际应用中,若砌筑方向为向左砌筑,则挤压组合为向左挤压后再向下挤压,具体的先进行左挤,挤压到位后,再进行向下挤压。若砌筑方向为向右砌筑,则挤压组合为向右挤压后再向下挤压,具体的向进行右挤,再进行向下挤压。
进一步的,对于所述砌砖位置位于普通位置或者位于顶端位置时,其第一挤压方式的选择,其只需要基于所述位置关系确定对应的砌块的砌筑方向;从预设的多个砌砖模式中选择满足所述砌筑方向的挤压组合,得到第一挤压方式,其中,所述挤压组合为向下-向左挤压组合或者向下-向右挤压组合。
即是上述的三种抹浆方式对应用于墙体中间普通的位置是两面抹浆、转角墙转角处的砌块是单面抹浆和用在一测有砌筑好的墙体,一侧有剪力墙或柱子的位置是三面抹浆。
205、将抹浆方式、挤压方式、抓砖方式和定位方式进行组合,得到对应的砌块的砌砖模式;
本实施例中,将所述抹浆方式、所述挤压方式、所述抓砖方式和所述定位方式按照砌砖流程顺序进行组合,得到与每一砌块对应的砌砖模式,其中所述砌砖流程为抹浆→抓砖→定位→挤压的顺序。
206、按照砌块分布中砌块的先后顺序对各砌砖模式进行排序,得到对应的砌砖模式顺序;
207、根据砌砖模式顺序控制砌砖机械臂抓取对应的砌块依次砌筑。
在该步骤之前,还包括:
确定所述目标砌块在所述抹浆机构上的摆放方向;
基于所述摆放方向判断所述目标砌块上被抹浆的表面是否与所述目标位置上的粘贴表面匹配;
若不匹配,则控制所述翻转机构将所述目标砌块进行放转,直至所述目标砌块上被抹浆的表面与所述目标位置上的粘贴表面匹配。
本实施例在上一实施例的基础上,详细描述了砌砖机器人针对每个砌砖位置进行砌砖模式的选择,可以实现中心位置砖、末端砖、L形状墙转角砖、T形状转角砖、顶层砖等类型的砖的机器人砌筑,保证该砌筑的砌块不与障碍物碰撞,同时不与已经砌筑完成的砌块碰撞,实现精准砌筑。
请参阅图12,本发明实施例中砌筑方法的第三个实施例包括:
301、确定待砌墙体的墙体类型,并基于墙体类型对待砌墙体进行砌砖规划,得到砌块分布和各砌块在墙体中的砌砖位置;
302、基于各砌块的砌砖位置,从预设的多个砌砖模式中选择对应的砌砖模式,并按照砌块分布中砌块的先后顺序对选择的砌砖模式进行组合,得到对应的砌砖模式顺序;
303、从砌砖模式顺序中确定目标砌砖模式,并基于目标砌砖模式确定目标砌块以及目标砖块的目标位置,其中目标砌砖模式为砌砖机械臂在当前时刻下执行的砌砖模式;
本实施例中,基于砌砖机器人对于砌砖模式顺序中各砌砖模式的执行顺序以及当前时刻从中确定目标砌砖模式,然后基于目标砌砖模式与砌块位置之间的对应关系确定目标砌块和目标砌块对应的目标位置,其中,该目标位置可以是普通位置、顶部位置、已完成砌筑的砌块和剪力墙之间的位置和转角位置中的一种。
304、基于砌砖模式中的抓砖方式,控制砌砖机械臂移动至对应砌块类型的砖区内抓取已按照对应的抹浆方式抹浆的目标砌块,并移动至预设的初始定位位置;
本实施例中,该初始定位位置可以理解为是控制砌砖机械臂进行砌砖位姿调整时的位置,即是砌砖机械臂抓取到砖后移动到目标位置附近的位置,具体的该初始定位位置可以通过以下方式确定:
基于所述砌砖机械臂的预设等待位置、所述目标位置和预设的标准距离,计算出所述砌砖机械臂在砌砖时的初始定位位置,其中,所述标准距离为目标砌块与上一块已完成砌筑的目标砌块之间的最小位姿调整距离。
在实际应用中,砌砖机械臂在未抓砖前和后都会设置一个等待位置,而抓砖后会的等待位置可以是一个相对值(标准距离),即是距离目标位置的偏移量,在砌砖机械臂抓砖后向目标位置移动的过程中实时检测目标位置,当目标位置进入砌砖机械臂中的视觉范围后,启动砌砖机械臂上测量装置测量砌砖机械臂上的砌块与目标位置之间的距离,当距离满足偏移量时,停止砌砖机械臂的移动控制,然后执行步骤305。
在本实施例中,对于控制砌砖机械臂抓砖时,基于目标位置的具体位置来选择正面抓砖还是侧面抓砖,对于正面抓取的方式如图8所示,具体的:
若所述目标位置不属于预设的特殊位置时,所述基于所述砌砖模式中的抓砖方式,控制所述砌砖机械臂移动至对应砌块类型的砖区内抓取已按照对应的抹浆方式抹浆的目标砌块,并移动至预设的初始定位位置,包括:基于所述砌砖模式中的第一抹浆方式对对应的砌块类型的目标砌块的表面进行抹浆,具体的,根据砌筑方向来确定不同的抹浆面,如图6和7所示;控制所述砌砖机械臂移动至所述目标砌块所在的砖区,并通过正面抓砖方式抓取所述目标砌块;在夹紧所述目标砌块后,控制所述砌砖机械臂将所述目标砌块移动至预设的初始定位位置。
若所述目标位置属于顶端位置时,所述基于所述砌砖模式中的抓砖方式,控制所述砌砖机械臂移动至对应砌块类型的砖区内抓取已按照对应的抹浆方式抹浆的目标砌块,并移动至预设的初始定位位置,包括:基于所述砌砖模式中的第一抹浆方式对对应的砌块类型的目标砌块的表面进行抹浆;控制所述砌砖机械臂移动至所述目标砌块所在的砖区,并通过侧面抓砖方式抓取目标砌块;在夹紧所述目标砌块后,控制所述砌砖机械臂将所述目标砌块移动至预设的初始定位位置。
若所述目标位置是已完成砌筑的砌块和剪力墙之间的位置时,所述基于所述砌砖模式中的抓砖方式,控制所述砌砖机械臂移动至对应砌块类型的砖区内抓取已按照对应的抹浆方式抹浆的目标砌块,并移动至预设的初始定位位置,包括:基于所述砌砖模式中的第二抹浆方式对对应的砌块类型的目标砌块中的三个表面进行抹浆,其中,三个表面包括两个相对的侧表面和位于两个相对的侧表面之间的底表面;控制所述砌砖机械臂移动至所述目标砌块所在的砖区,并通过正面抓砖方式抓取目标砌块;在夹紧所述目标砌块后,控制所述砌砖机械臂将所述目标砌块移动至预设的初始定位位置。
若所述目标位置是已完成砌筑的砌块和剪力墙之间的位置时,所述基于所述砌砖模式中的抓砖方式,控制所述砌砖机械臂移动至对应砌块类型的砖区内抓取已按照对应的抹浆方式抹浆的目标砌块,并移动至预设的初始定位位置,包括:基于所述砌砖模式中的第二抹浆方式对对应的砌块类型的目标砌块中的三个表面进行抹浆,其中,三个表面包括两个相对的侧表面和位于两个相对的侧表面之间的底表面;控制所述砌砖机械臂移动至所述目标砌块所在的砖区,并通过正面抓砖方式抓取目标砌块;在夹紧所述目标砌块后,控制所述砌砖机械臂将所述目标砌块移动至预设的初始定位位置。
305、基于砌砖模式中的定位方式,测量目标砌块在初始定位位置上相对于目标位置的位移量和夹角,并基于位移量和夹角确定调整量;
本实施例中,在砌砖机械臂移动到初始定位位置后,执行砌砖模式中的定位方式对砌块进行调整,以使得砌砖机械臂上的砌块与目标位置相匹配,最后移动砌砖机械臂将砌块砌筑至目标位置即可。
进一步的,该定位方式包括激光传感器定位和视觉定位,其中,激光传感器指的是利用设置于砌砖机械臂的末端位置的激光传感器发射激光信号测量位于机械臂夹爪上的砌块与墙体中的砌块或者剪力墙或者柱子之间的平移量以及夹角,其中,激光传感器定位还可以用于存在障碍的位置砌砖,即是机器人砌筑有障碍物时需要进行躲避障碍物的砌筑,在设计砌筑流程时,采用激光测距的方式来解决;视觉定位指的是利用设置于砌砖机械臂上的影像拾取装置采集底面上的激光测量盒发射的十字激光面,并基于十字激光面测量机械臂夹爪上的砌块与目标位置之间的偏移量和夹角。
在本实施例中,利用定位方式对砌砖机械臂上的砌块砌筑到转角位置之外的位置时的位姿调整,具体的,控制所述砌砖机械臂调整所述目标砌块在所述初始定位位置上的位置姿态,将所述所述砌砖机械臂末端上的激光传感器射出激光落于相机的视野范围内;计算所述目标砌块中被抹浆的各表面与所述目标位置上的已完成砌筑的砌块的对应的表面之间的距离、俯仰角度和倾斜角度;基于所述距离、所述俯仰角度和所述倾斜角度确定调整量。
在本实施例中,利用定位方式对砌砖机械臂上的砌块砌筑到转角位置时的位姿调整,具体还可以是通过启动所述砌砖机械臂上的影像拾取装置,获取位于转角墙区域下的激光测量盒产生的十字激光面的信息;计算所述目标砌块的表面相对于所述十字激光面所构建的参考平面的第二位置关系,以及所述目标砌块中被抹浆的各表面与所述目标位置上的已完成砌筑的砌块的对应的表面之间的距离、俯仰角度、倾斜角度和绕高度方向的转角;基于所述第二位置关系、所述距离、所述俯仰角度和所述倾斜角度确定调整量。
即是上述的几种定位方式分别是对于普通位置的砌块,对绕高度方向旋转和垂直于墙面的方向定位。对于转角的墙体转角位置的砌块的砌筑,需要特殊的定位策略。左L墙的正面第一块砖,定位策略是采用十字激光来定位,定位两个方向的位移和一个方向的转角。平移的X,Y方向的位移,即垂直于墙面的方向和平行于墙面的方向,另外还有一个绕高度方向的转角进行定位,实现准确定位。砖角墙的侧面的第一块也是用类似的策略定位。
如图13-16所示,针对L型墙的砌块的砌筑时,利用激光测量盒定位,具体根据目标位置是凸还是凹从十字激光面中选择对应的主参考线,即是以L的正边还是侧边定位,对于左L型墙,其可以采用左L正边定位或者是左L侧边定位,如图12-13所示。对于右L型墙,其可以采用右L正边定位或者是右L侧边定位,如图15-16所示。
306、基于调整量对目标砌块进行位置调整,并利用砌砖模式中的挤压方式将调整后的目标砌块砌筑至目标位置上。
该步骤中,所述挤压方式包括第一挤压方式和第二挤压方式,其中,第一挤压方式为向右-向下砌砖挤压或向左-向下砌砖挤压,主要是对普通位置砌筑,左向砌筑采用左挤压和向下挤压结合。先进行左挤,挤压到位后,再进行向下挤压。右向砌筑采用右向挤压和向下挤压向结合。向进行右挤,再进行向下挤压。第二挤压方式为向下挤压,主要是对转角位置砌筑,转角位置的砖仅进行向下挤压,不进行左挤压或右挤压,而转角位置之外的转则是需要根据砌筑方向来确定增加左挤压或右挤压。
综上,通过设置多个砌砖模式来对应不同类型的位置,从而解决了特殊场景下的砌筑策略,在砌筑每面墙的顶部位置、转角位置和剪力墙位置时,保证砌块同时不与已经砌筑完成的砌块碰撞,实现对砌块的单独控制和精准控制,同时还保证了砌砖机器人对于各种复杂结构的墙体均可实现精准砌砖的控制,解决了现有的机器人在砌砖控制时,无法保证砌块不与已经砌筑完成的砌块碰撞,导致砌筑精准度较低的技术问题。
请参阅图17和18,本发明实施例中砌筑方法的第四个实施例,该实施例中是以直行墙中的末端存在剪力墙或柱子为例的砌筑方法,即末位砌筑方法,该方法包括:
401、砌砖机器人完成前面正常砖块的砌筑,待砌筑砖一侧是已经砌筑砖,另一侧是剪力墙或柱子;
402、上砖机或人工给砌砖机器人上砖,砌砖机器人自动抹砂浆。
其中,通过抹浆机构抹浆于砖块的两个侧面以及其中一个水平面,另一个水平面不进行抹浆,形成三个抹浆面。
403、砌砖机械臂从等待位移动到抓取位,抓取旋转完成的带浆砌块,移动到初始待砌筑位置。
通过翻转机构将带浆砖块的水平抹浆面和水平非抹浆面上下翻转,砌砖机械臂沿着水平非抹浆面拾取砖块,三个抹浆面分别朝左右以及朝下;通过砌砖机械臂的摆动将带浆砖块移动至初始待砌位置。
404、砌砖机械臂移动向待砌筑的位置,在距离目标点一定距离的位置启动多传感器融合工艺包,进行位置姿态调整,使得激光测量盒的激光线照射到影像拾取装置的视野范围内。
405、基于砌砖夹爪上的倾角传感器调整俯仰角α和翻滚角β。
406、通过砌砖夹爪上的激光测距测量夹爪到左右两侧的竖直目标放置面的距离,一侧为到剪力墙或柱子的距离,另一侧为到上一块砖块侧面的距离,砌砖机器人计算出带浆砖块距离墙或柱子的距离。
407、砌砖机器人再次基于倾角传感器调整俯仰角α和翻滚角β以及基于影像拾取装置调整位置和姿态距离X和航向角θ,直到四个参数都调整到阈值范围之内。
其中,影像拾取装置检测出砌砖夹爪上的砌块距离目标位置的姿态距离X以及航向角θ,然后影像拾取装置基于检测到的姿态距离X和航向角θ对砌砖夹爪上的砌块进行调整,直到姿态距离X和航向角θ在阈值范围之内。
408、砌砖机械臂带动夹爪向已经砌筑好的砖一侧横向挤压,挤压过程中实时读取砌砖机械臂各个关节的电流和力矩。直到力矩达到阈值,判断挤压到位。
409、如不满足,机械臂对两个参数进行调整,直到两个参数达到阈值范围内。
410、砌砖机器人主控计算机给夹爪发信号,夹爪松开砌块,砌砖机械臂带动夹爪返回等待位,判断涂好砂浆的砌块是否完成翻转。待完成翻转,砌砖机械臂带动夹爪抓取第二块砖进行砌筑。重复第410步。
在本实施例中,对于L形状墙的砌筑方法,其与上述直行墙的砌筑方法类型,仅是针对位于L型转角位置的砌块增加激光测量盒的辅助定位和采用向下挤压的方式砌筑,对于L形状墙中的普通位置的砖,需要调整俯仰倾斜两个角度机械臂前后伸缩的距离X和绕高度方向的转角θ。左右和上下两个方向靠挤压来定位。对于L形墙的转角定位砖,如图19中的粗线框内的砖块,其定位除了采用上面的俯仰角、倾斜角、机械臂前后伸缩的距离X和绕高度方向的转角θ四个自由度外,还需要定位定位左右的位置,该定位左右的位置采用图1中的激光测量盒700实现。需要根据传感器增加一个方向的定位。即转角砖只有一个向下的自由度是靠挤压到位来做定位的,其他的5个自由度都是靠传感器来引导调整定位的。
进一步的,L墙的转角砖砌筑好后砌筑非转角砖会向转角砖挤压。易造成转角砖的位移,因此需要一个辅助工装,固定住后支撑住转角砖,保证转角砖不被挤压产生位移。
对于T形状墙的砌筑,如图20所示,T形状墙体的砌筑采用L墙加直墙的砌筑方式。先按照L墙的方案砌筑一个转角每间隔一块就有一块突出的砖。直到完成整面墙的砌筑。
通过设置多个砌砖模式来对应不同类型的位置,从而解决了特殊场景下的砌筑策略,在砌筑每面墙的顶部位置、转角位置和剪力墙位置时,保证砌块同时不与已经砌筑完成的砌块碰撞,实现对砌块的单独控制和精准控制,同时还保证了砌砖机器人对于各种复杂结构的墙体均可实现精准砌砖的控制,解决了现有的机器人在砌砖控制时,无法保证砌块不与已经砌筑完成的砌块碰撞,导致砌筑精准度较低的技术问题。
上面对本发明实施例中砌筑方法进行了描述,下面对本发明实施例中砌砖机器人进行描述,请参阅图21,本发明实施例中砌砖机器人一个实施例包括:控制器2110,以及分别与所述控制器2110连接的砌砖机械臂2120和抹浆机构2130;
在所述砌砖机械臂2120上设有多个激光传感器和影像拾取装置;
所述控制器2110,用于确定待砌墙体的墙体类型,并基于所述墙体类型对所述待砌墙体进行砌砖规划,得到砌块分布和各砌块在墙体中的砌砖位置;基于各所述砌块的砌砖位置,从预设的多个砌砖模式中选择对应的砌砖模式,并按照所述砌块分布中砌块的先后顺序对选择的砌砖模式进行组合,得到对应的砌砖模式顺序;
所述砌砖机械臂2120,用于根据所述砌砖模式顺序抓取对应的砌块,并基于多个所述激光传感器和影像拾取装置进行辅助定位后,将抓取的砌块砌筑至对应的位置;
所述抹浆机构2130,用于为所述砌块的表面抹浆。
本发明实施例中,通过确定待砌墙体的墙体类型,基于墙体类型对待砌墙体进行砌砖规划,得到砌块分布和各砌块在墙体中的砌砖位置;基于各砌块的砌砖位置,从预设的多个砌砖模式中选择对应的砌砖模式,并按照砌块分布中砌块的先后顺序对选择的砌砖模式进行组合,得到对应的砌砖模式顺序;根据砌砖模式顺序控制砌砖机械臂抓取对应的砌块依次砌筑。通过不同砌砖模式实现对砌块的单独控制和精准控制,同时还保证了砌砖机器人对于各种复杂结构的墙体均可实现精准砌砖的控制,解决了现有的机器人在砌砖控制时,无法保证砌块不与已经砌筑完成的砌块碰撞,导致砌筑精准度较低的技术问题。
上面图21从模块化功能实体的角度对本发明实施例中的中砌砖机器人进行详细描述,下面从硬件处理的角度对本发明实施例中砌砖机器人进行详细描述。
图22是本发明实施例提供的一种砌砖机器人的结构示意图,该砌砖机器人600可因配置或性能不同而产生比较大的差异,可以包括一个或一个以上处理器(centralprocessing units,CPU)610(例如,一个或一个以上处理器)和存储器620,一个或一个以上存储应用程序633或数据632的存储介质630(例如一个或一个以上海量存储设备)。其中,存储器620和存储介质630可以是短暂存储或持久存储。存储在存储介质630的程序可以包括一个或一个以上模块(图示没标出),每个模块可以包括对砌砖机器人600中的一系列指令操作。更进一步地,处理器610可以设置为与存储介质630通信,在砌砖机器人600上执行存储介质630中的一系列指令操作,以实现上述砌筑方法的步骤。
砌砖机器人600还可以包括一个或一个以上电源640,一个或一个以上有线或无线网络接口650,一个或一个以上输入输出接口660,和/或,一个或一个以上操作系统631,例如Windows Serve,Mac OS X,Unix,Linux,FreeBSD等等。本领域技术人员可以理解,图22示出的砌砖机器人结构并不构成对本申请提供的砌砖机器人的限定,可以包括比图示更多或更少的部件,或者组合某些部件,或者不同的部件布置。
本发明还提供一种所述砌筑系统包括:至少一个如上所述的砌砖机器人和激光测量盒,其中,所述激光测量盒用于在转角位置产生十字激光面辅助所述砌砖机器人将抓取的砌块砌筑至对应的位置。
本发明还提供一种计算机可读存储介质,该计算机可读存储介质可以为非易失性计算机可读存储介质,该计算机可读存储介质也可以为易失性计算机可读存储介质,所述计算机可读存储介质中存储有指令,当所述指令在计算机上运行时,使得计算机执行所述砌筑方法的步骤。
所属领域的技术人员可以清楚地了解到,为描述的方便和简洁,上述描述的系统或装置、单元的具体工作过程,可以参考前述方法实施例中的对应过程,在此不再赘述。
所述集成的单元如果以软件功能单元的形式实现并作为独立的产品销售或使用时,可以存储在一个计算机可读取存储介质中。基于这样的理解,本发明的技术方案本质上或者说对现有技术做出贡献的部分或者该技术方案的全部或部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质中,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行本发明各个实施例所述方法的全部或部分步骤。而前述的存储介质包括:U盘、移动硬盘、只读存储器(read-only memory,ROM)、随机存取存储器(random access memory,RAM)、磁碟或者光盘等各种可以存储程序代码的介质。
以上所述,以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
- 一种砌筑方法、砌筑系统及砌筑机器人
- 一种砌筑方法、砌筑系统及砌筑机器人