L4级无人驾驶车辆的无线遥控驾驶系统及其方法
文献发布时间:2023-06-19 09:51:02
技术领域:
本发明涉及一种L4级无人驾驶车辆的无线遥控驾驶系统及其方法,其属于汽车技术领域。
背景技术:
随着现在无人驾驶技术的发展,L4级无人驾驶观光车应用而生,得到市场极大的肯定,引领无人驾驶的潮流。L4级无人驾驶观光车在设计之初,为了最大化利用车内空间从而取消原始方向盘和油门刹车。L4级无人驾驶仅是在其特定条件下车辆实现无人驾驶任务,非特定条件以及车辆测试调试中均需要人工接管以及操作。而通过采用外接有线模拟方向盘,车内放置占用空间,使用不便安全等级也不够。
因此,确有必要对现有技术进行改进以解决现有技术之不足。
发明内容:
本发明是为了解决上述现有技术存在的问题而提供一种L4级无人驾驶车辆的无线遥控驾驶系统及其方法,其能够解决在非自动驾驶情况下,无方向盘、踏板造成车辆驾驶困难的问题。
本发明采用如下技术方案:一种L4级无人驾驶车辆的无线遥控驾驶系统,包括采集子系统、感知子系统、通讯子系统和交互子系统;
所述采集子系统采集驾驶员的操控指令,并将驾驶员的意图数字化传输到控制子系统,控制子系统实时监控采集子系统和通讯子系统的运行状态,所述通讯子系统通过UART转zigbee、以及zigbee自组网以实现控制指令的无线传输,所述交互子系统通过线束与车辆底层控制器连接,交互子系统接收到通讯子系统的数据,检测自身与车辆的连接状态之后将控制指令传递给车辆底层控制器。
进一步地,所述采集子系统做方向采集、档位采集、加减速采集、灯光、空调采集、控制模式采集。
进一步地,所述控制子系统通过采集子系统采集到驾驶员的方向指令、速度指令、空调指令、模式开关指令,采用滤波和模型处理,将数据处理,整理成正确的指令。
本发明还采用如下技术方案:一种L4级无人驾驶车辆的无线遥控驾驶方法,步骤如下:
步骤一:采集子系统将驾驶员的人工接管命令和驾驶操作指令精准记录,并传递给控制子系统;
步骤二:控制子系统梳理相关信息,处理成正确的车辆控制指令,通过通讯子系统,以无线通讯的形式,传递到交互子系统;
步骤三:交互子系统通过数据交互,将车辆控制指令正确的传递给车辆执行器,实现对车辆的控制。
本发明具有如下有益效果:
(1).驾驶器通过无线通讯实现车辆控制,打破传统观念,实现第三视角驾驶车辆(如车外5m内)。
(2).L4级无人驾驶车辆,由于现阶段技术不成熟,均需要调试、标定,此无线驾驶系统可方便解决无方向盘、无踏板车辆无法移动的难题。
(3).此无线遥控驾驶系统,具有自动驾驶和人工驾驶自主切换功能,可快速人工接管或恢复自动驾驶。
附图说明:
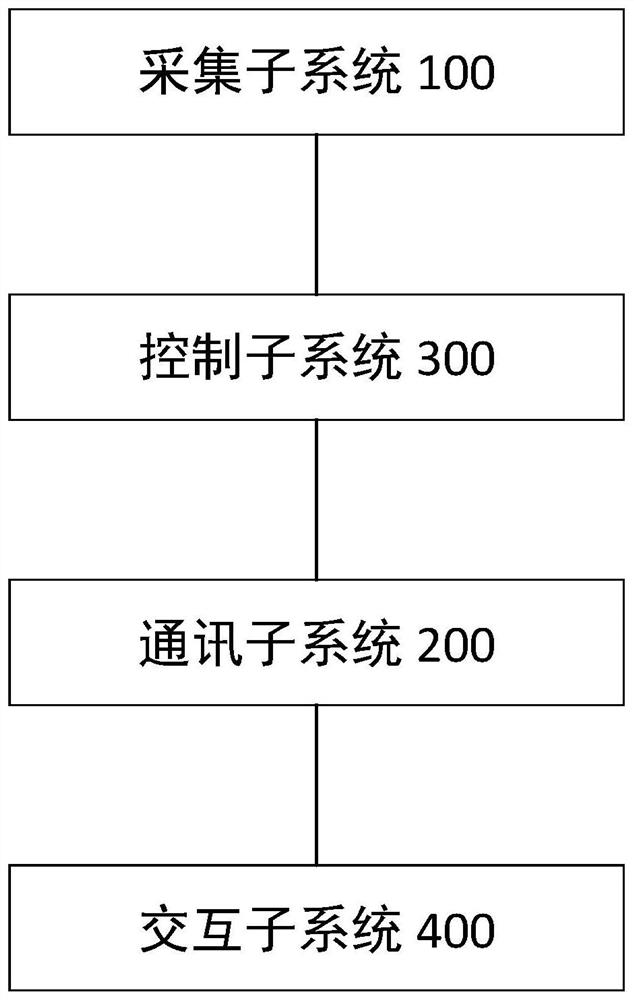
图1为本发明L4级无人驾驶车辆的无线遥控驾驶系统的示意图。
图2为本发明L4级无人驾驶车辆的无线遥控驾驶系统的控制原理图。
具体实施方式:
下面结合附图对本发明作进一步的说明。
本发明L4级无人驾驶车辆的无线遥控驾驶系统包括采集子系统100、感知子系统300、通讯子系统200和交互子系统400。
采集子系统100用于采集驾驶员的操控指令,其中,在本发明的实施中,采集子系统100需要做方向采集、档位采集、加减速采集、灯光、空调采集、控制模式采集。采集子系统100包括多个不同类型的传感器,如遥感和开关,可以根据驾驶员的操作意图,将其指令正确的采集,并做一定的防误触处理,实现100ms内实时变化的采集。
采集子系统100相当于把驾驶员的意图数字化,传输到控制子系统300。
控制子系统300用于分析和收集采集子系统100的驾驶员意图和控制指令,具体而言,控制子系统300通过采集子系统100采集到驾驶员的方向指令、速度指令、空调指令、模式开关指令,采用一些滤波和一些模型处理,将数据处理,整理成正确的指令。除了这些,控制子系统300需要监控采集子系统100和通讯子系统200的运行状态,做实时监控。
其中,在本发明的实施例中,控制子系统300通过技术人员自定义的优化算法,对采集数据进行模型化处理,提取特征值,让控制变化更倾向于实际方向盘的反馈。
自定义的优化算法即通过采集遥感的数据,做大量的形态分析,结合驾驶员的操作习惯,对于遥感常用线程做线性处理、对于非常用线程做差值补偿滤波,对于遥感的0位和尾位做截止滤波处理。
通讯子系统200,用于通过UART转zigbee、以及zigbee自组网,实现控制指令的无线传输。更具体的是,需要通过zigbee自身模块特点,实时监控无线状态,如出现网络异常,需要及时将状态上报给控制子系统300,做自检处理。
需要说明的是通讯子系统200和控制子系统300的双向通讯,在100ms发送周期的过程中,实时数据更新,确保无线数据通讯的可靠性。
交互子系统400,用于通过线束与车辆底层控制器连接,通过特定的协议实现无人驾驶车辆的无线遥控驾驶,更具体是交互子系统400接收到通讯子系统200的数据之后,检测自身与车辆的连接状态之后,立刻将控制指令传递给车辆底层控制器,100ms的周期数据响应,满足驾驶的及时响应。
根据本发明实施的L4级无人驾驶的无线遥控驾驶系统,可通过采集子系统100将驾驶员的人工接管命令和驾驶操作指令精准记录,并传递给控制子系统300,控制子系统300梳理相关信息,处理成正确的车辆控制指令,通过通讯子系统200,以无线通讯的形式,传递到交互子系统400,交互子系统400通过数据交互,将车辆控制指令正确的传递给车辆执行器,实现对车辆的控制。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下还可以作出若干改进,这些改进也应视为本发明的保护范围。
- L4级无人驾驶车辆的无线遥控驾驶系统及其方法
- 无线遥控辅助驾驶系统